正在加载图片...
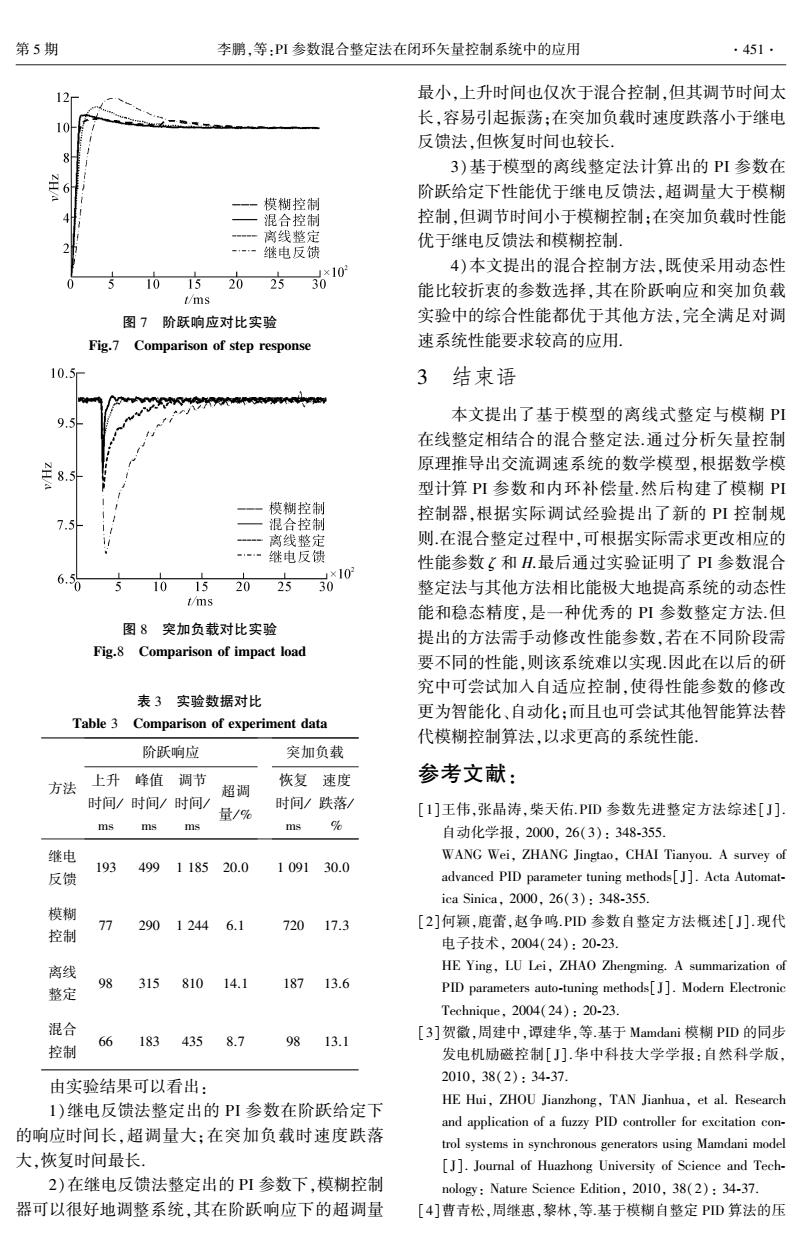
第5期 李鹏,等:PI参数混合整定法在闭环矢量控制系统中的应用 ·451· 12 最小,上升时间也仅次于混合控制,但其调节时间太 长,容易引起振荡:在突加负载时速度跌落小于继电 10 反馈法,但恢复时间也较长, 3)基于模型的离线整定法计算出的PI参数在 阶跃给定下性能优于继电反馈法,超调量大于模糊 模糊控制 混合控制 控制,但调节时间小于模糊控制:在突加负载时性能 离线整定 优于继电反馈法和模糊控制. 继电反馈 ×10 4)本文提出的混合控制方法,既使采用动态性 15 2025 30 能比较折衷的参数选择,其在阶跃响应和突加负载 t/ms 图7阶跃响应对比实哈 实验中的综合性能都优于其他方法,完全满足对调 Fig.7 Comparison of step response 速系统性能要求较高的应用. 10. 3结束语 本文提出了基于模型的离线式整定与模糊PI 在线整定相结合的混合整定法.通过分析矢量控制 原理推导出交流调速系统的数学模型,根据数学模 型计算PI参数和内环补偿量.然后构建了模糊PI 模糊控制 控制器,根据实际调试经验提出了新的PI控制规 混合控制 一离线整定 则.在混合整定过程中,可根据实际需求更改相应的 继电反馈 性能参数(和H.最后通过实验证明了PI参数混合 ×10 1015 20 25 30 整定法与其他方法相比能极大地提高系统的动态性 t/ms 能和稳态精度,是一种优秀的PI参数整定方法.但 图8突加负载对比实验 提出的方法需手动修改性能参数,若在不同阶段需 Fig.8 Comparison of impact load 要不同的性能,则该系统难以实现.因此在以后的研 究中可尝试加入自适应控制,使得性能参数的修改 表3实验数据对比 更为智能化、自动化:而且也可尝试其他智能算法替 Table 3 Comparison of experiment data 代模糊控制算法,以求更高的系统性能。 阶跃响应 突加负载 参考文献: 方法 上升峰值调节 恢复速度 超调 时间/时间/时间/ 时间/跌落/ 量/% [1]王伟,张晶涛,柴天佑.PD参数先进整定方法综述[J]. ms ms ms ms % 自动化学报,2000,26(3):348-355. 继电 WANG Wei,ZHANG Jingtao,CHAI Tianyou.A survey of 193 499 1185 20.0 1091 30.0 反馈 advanced PID parameter tuning methods[J].Acta Automat- ica Sinica,2000,26(3):348-355. 模糊 77 29012446.1 720 17.3 [2]何颖,鹿蕾,赵争鸣.PD参数自整定方法概述[J].现代 控制 电子技术,2004(24):20-23. 离线 HE Ying,LU Lei,ZHAO Zhengming.A summarization of 98 315 810 14.1 187 13.6 整定 PID parameters auto-tuning methods[J].Modern Electronic Technique,2004(24):20-23. 混合 66 183 435 8.7 98 13.1 [3]贺徽,周建中,谭建华,等.基于Mamdani模糊PD的同步 控制 发电机励磁控制[J].华中科技大学学报:自然科学版, 由实验结果可以看出: 2010,38(2):34-37. HE Hui,ZHOU Jianzhong,TAN Jianhua,et al.Research 1)继电反馈法整定出的PI参数在阶跃给定下 and application of a fuzzy PID controller for excitation con- 的响应时间长,超调量大:在突加负载时速度跌落 trol systems in synchronous generators using Mamdani model 大,恢复时间最长。 [J].Journal of Huazhong University of Science and Tech- 2)在继电反馈法整定出的PI参数下,模糊控制 nology:Nature Science Edition,2010,38(2):34-37. 器可以很好地调整系统,其在阶跃响应下的超调量 [4]曹青松,周继惠,黎林,等.基于模糊自整定PD算法的压图 7 阶跃响应对比实验 Fig.7 Comparison of step response 图 8 突加负载对比实验 Fig.8 Comparison of impact load 表 3 实验数据对比 Table 3 Comparison of experiment data 方法 阶跃响应 上升 时间/ ms 峰值 时间/ ms 调节 时间/ ms 超调 量/ % 突加负载 恢复 时间/ ms 速度 跌落/ % 继电 反馈 193 499 1 185 20.0 1 091 30.0 模糊 控制 77 290 1 244 6.1 720 17.3 离线 整定 98 315 810 14.1 187 13.6 混合 控制 66 183 435 8.7 98 13.1 由实验结果可以看出: 1)继电反馈法整定出的 PI 参数在阶跃给定下 的响应时间长ꎬ超调量大ꎻ在突加负载时速度跌落 大ꎬ恢复时间最长. 2)在继电反馈法整定出的 PI 参数下ꎬ模糊控制 器可以很好地调整系统ꎬ其在阶跃响应下的超调量 最小ꎬ上升时间也仅次于混合控制ꎬ但其调节时间太 长ꎬ容易引起振荡ꎻ在突加负载时速度跌落小于继电 反馈法ꎬ但恢复时间也较长. 3)基于模型的离线整定法计算出的 PI 参数在 阶跃给定下性能优于继电反馈法ꎬ超调量大于模糊 控制ꎬ但调节时间小于模糊控制ꎻ在突加负载时性能 优于继电反馈法和模糊控制. 4)本文提出的混合控制方法ꎬ既使采用动态性 能比较折衷的参数选择ꎬ其在阶跃响应和突加负载 实验中的综合性能都优于其他方法ꎬ完全满足对调 速系统性能要求较高的应用. 3 结束语 本文提出了基于模型的离线式整定与模糊 PI 在线整定相结合的混合整定法.通过分析矢量控制 原理推导出交流调速系统的数学模型ꎬ根据数学模 型计算 PI 参数和内环补偿量.然后构建了模糊 PI 控制器ꎬ根据实际调试经验提出了新的 PI 控制规 则.在混合整定过程中ꎬ可根据实际需求更改相应的 性能参数 ζ 和 H.最后通过实验证明了 PI 参数混合 整定法与其他方法相比能极大地提高系统的动态性 能和稳态精度ꎬ是一种优秀的 PI 参数整定方法.但 提出的方法需手动修改性能参数ꎬ若在不同阶段需 要不同的性能ꎬ则该系统难以实现.因此在以后的研 究中可尝试加入自适应控制ꎬ使得性能参数的修改 更为智能化、自动化ꎻ而且也可尝试其他智能算法替 代模糊控制算法ꎬ以求更高的系统性能. 参考文献: [1]王伟ꎬ张晶涛ꎬ柴天佑.PID 参数先进整定方法综述[ J]. 自动化学报ꎬ 2000ꎬ 26(3): 348 ̄355. WANG Weiꎬ ZHANG Jingtaoꎬ CHAI Tianyou. A survey of advanced PID parameter tuning methods[J]. Acta Automat ̄ ica Sinicaꎬ 2000ꎬ 26(3): 348 ̄355. [2]何颖ꎬ鹿蕾ꎬ赵争鸣.PID 参数自整定方法概述[ J].现代 电子技术ꎬ 2004(24): 20 ̄23. HE Yingꎬ LU Leiꎬ ZHAO Zhengming. A summarization of PID parameters auto ̄tuning methods[J]. Modern Electronic Techniqueꎬ 2004(24): 20 ̄23. [3]贺徽ꎬ周建中ꎬ谭建华ꎬ等.基于 Mamdani 模糊 PID 的同步 发电机励磁控制[ J].华中科技大学学报:自然科学版ꎬ 2010ꎬ 38(2): 34 ̄37. HE Huiꎬ ZHOU Jianzhongꎬ TAN Jianhuaꎬ et al. Research and application of a fuzzy PID controller for excitation con ̄ trol systems in synchronous generators using Mamdani model [J]. Journal of Huazhong University of Science and Tech ̄ nology: Nature Science Editionꎬ 2010ꎬ 38(2): 34 ̄37. [4]曹青松ꎬ周继惠ꎬ黎林ꎬ等.基于模糊自整定 PID 算法的压 第 5 期 李鹏ꎬ等:PI 参数混合整定法在闭环矢量控制系统中的应用 451