正在加载图片...
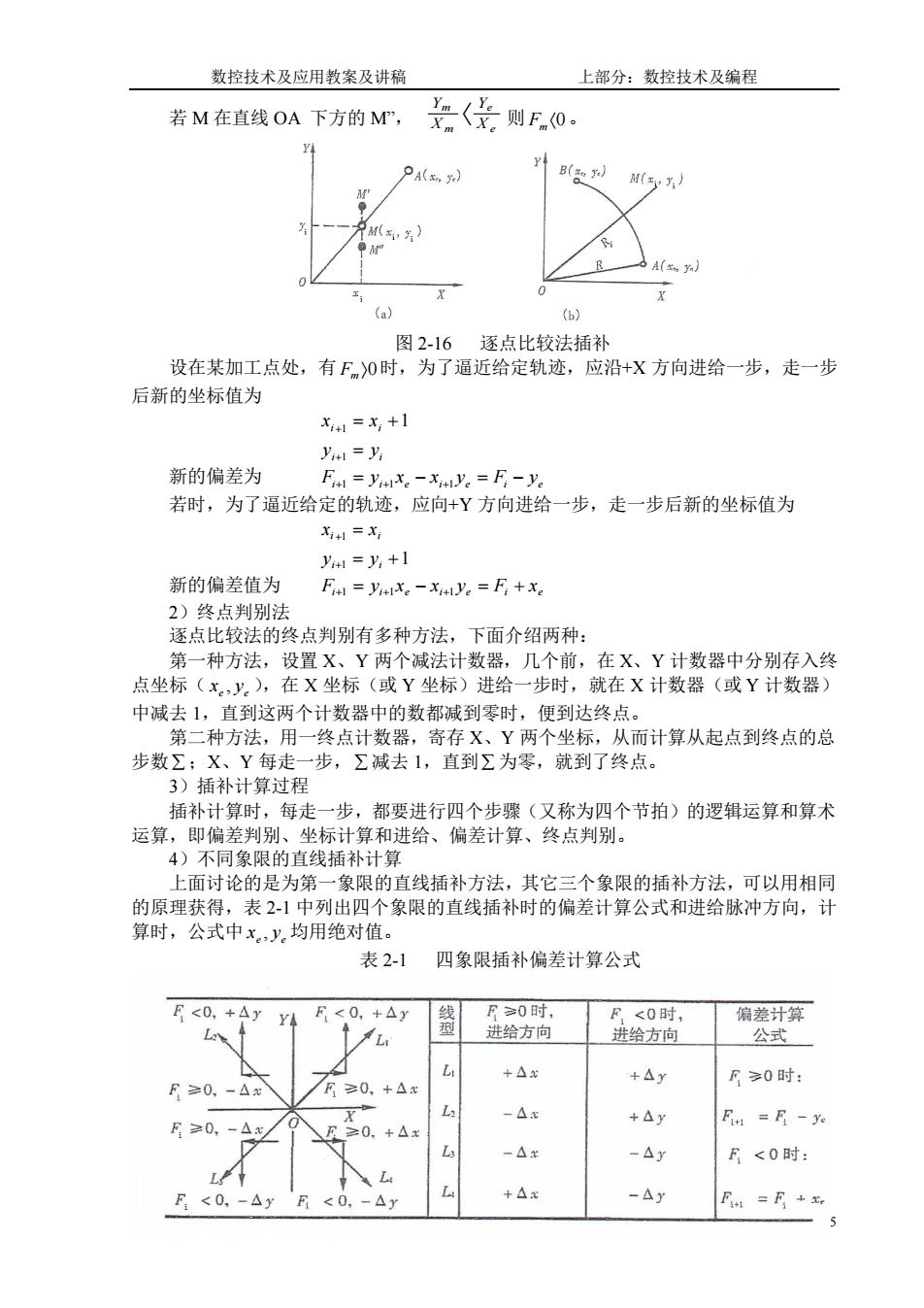
数控技术及应用教案及讲稿 上部分:数控技术及编程 若M在直线OA下方的M, 〈货则F0: ( (1) 图2-16逐点比较法插补 设在某加工点处,有F0时,为了逼近给定轨迹,应沿+X方向进给一步,走一步 后新的坐标值为 X,=X.+1 新的偏差为 F1=yx。-xy。=E-. 若时,为了逼近给定的轨迹,应向+Y方向进给一步,走一步后新的坐标值为 XiM =Xi 新的偏差值为 F=x。-x。=E+x 2)终点判别法 逐点比较法的终点判别有多种方法,下面介绍两种: 第一种方法,设置X、Y两个减法计数器,几个前,在X、 Y计数器中分别存入终 点坐标(x,y.),在X坐标(或Y坐标)进给一步时,就在X计数器(或Y计数器 中减去1,直到这两个计数器中的数都减到零时,便到达终点。 第二种方法,用一终点计数器,寄存X、Y两个坐标,从而计算从起点到终点的总 步数∑:X、Y每走 步,Σ减去1,直到Σ为零,就到了终点 3)插补计算过程 插补计算时,每走一步,都要进行四个步骤(又称为四个节拍)的逻辑运算和算术 运算,即偏差判别、坐标计算和进给、偏差计算、终点判别。 4)不同象限的直线插补计算 上面讨论的是为第 一象限的直线插补方法,其它三个象限的插补方法,可以用相同 的原理获得,表21中列出四个象限的直线插补时的偏差计算公式和进给脉冲方向,计 算时,公式中x,y均用绝对值。 表2-1 四象限插补偏差计算公式 F<0,+Ay YA F<0.+△Y F≥0时 0时 偏差计算 L 进给方向 进给方向 +△ F≥0.-△ ≥0,+△x +4y F≥0时: -△ +4 F=F- 0,+△ -△ -△y F<0时: L F<0,-△y F<0.-△y +x -Ay F =F+x -5 数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 5 若 M 在直线 OA 下方的 M”, e e m m X Y X Y 则 Fm 0。 图 2-16 逐点比较法插补 设在某加工点处,有 Fm 0 时,为了逼近给定轨迹,应沿+X 方向进给一步,走一步 后新的坐标值为 i i i i y y x x = = + + + 1 1 1 新的偏差为 i i e i e i e F = y x − x y = F − y +1 +1 +1 若时,为了逼近给定的轨迹,应向+Y 方向进给一步,走一步后新的坐标值为 1 1 1 = + = + + i i i i y y x x 新的偏差值为 i i e i e i e F = y x − x y = F + x +1 +1 +1 2)终点判别法 逐点比较法的终点判别有多种方法,下面介绍两种: 第一种方法,设置 X、Y 两个减法计数器,几个前,在 X、Y 计数器中分别存入终 点坐标( e e x , y ),在 X 坐标(或 Y 坐标)进给一步时,就在 X 计数器(或 Y 计数器) 中减去 1,直到这两个计数器中的数都减到零时,便到达终点。 第二种方法,用一终点计数器,寄存 X、Y 两个坐标,从而计算从起点到终点的总 步数 ;X、Y 每走一步, 减去 1,直到 为零,就到了终点。 3)插补计算过程 插补计算时,每走一步,都要进行四个步骤(又称为四个节拍)的逻辑运算和算术 运算,即偏差判别、坐标计算和进给、偏差计算、终点判别。 4)不同象限的直线插补计算 上面讨论的是为第一象限的直线插补方法,其它三个象限的插补方法,可以用相同 的原理获得,表 2-1 中列出四个象限的直线插补时的偏差计算公式和进给脉冲方向,计 算时,公式中 e e x , y 均用绝对值。 表 2-1 四象限插补偏差计算公式