正在加载图片...
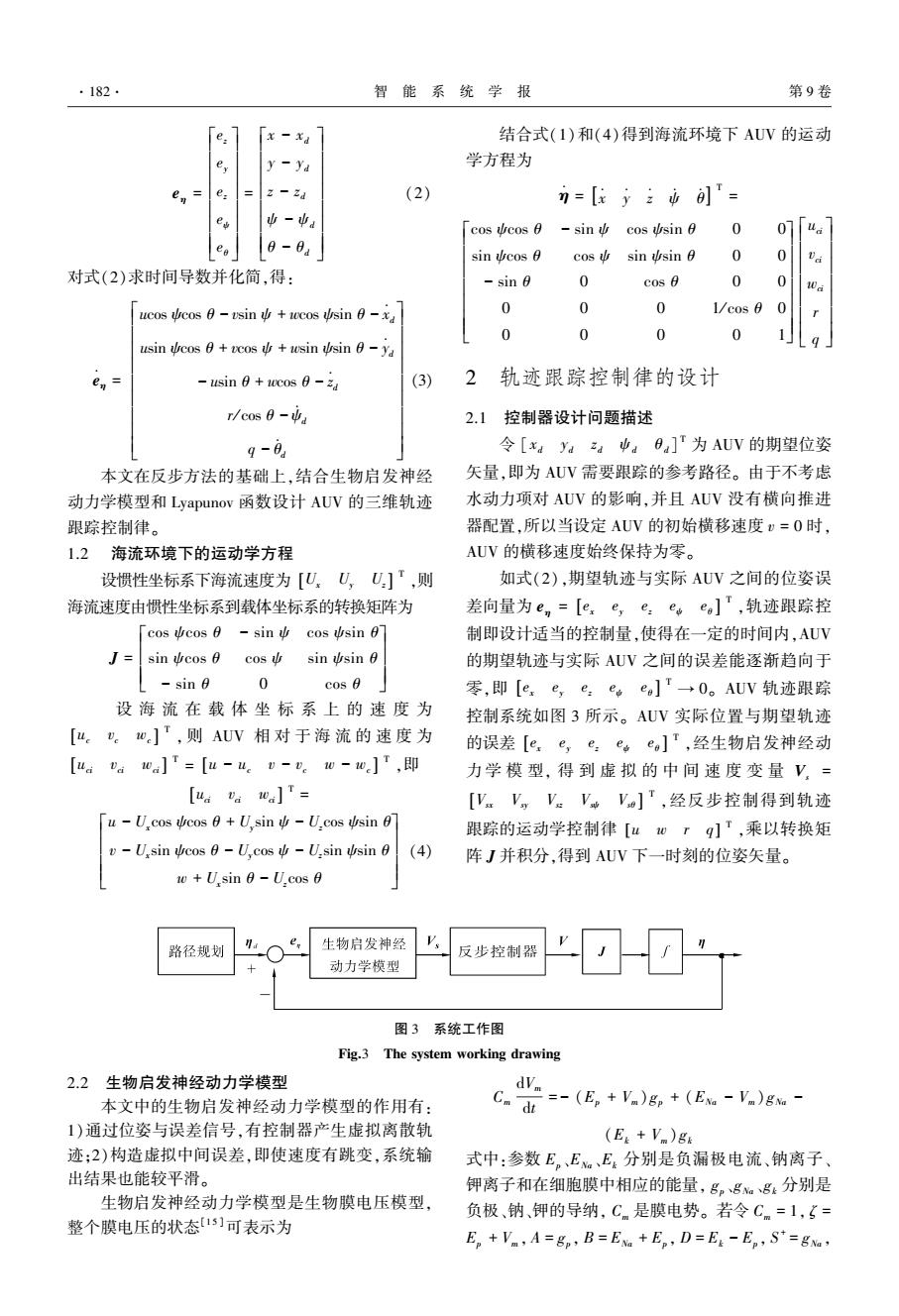
.182 智能系统学报 第9卷 e. x一xd 结合式(1)和(4)得到海流环境下AUV的运动 y-ya 学方程为 en= e: z-Zd (2) n=[ky:市)= cos ucos 0 -sin业cos usin 0 0 0-0a sin ucos 0 cos sin usin 0 0 0 对式(2)求时间导数并化简,得: sin 0 0 cos 0 0 0 ucos tcos0-sin业+wcos sin0-元a 0 0 0 1/cos 0 0 0 0 0 1 usin urcos vcos +wsin tsin e-ya en= usin 0 wcos 0-z (3) 2轨迹跟踪控制律的设计 r/cos 0-a 2.1控制器设计问题描述 9-0 令[xaya2a中aB]T为AUV的期望位姿 本文在反步方法的基础上,结合生物启发神经 矢量,即为AUV需要跟踪的参考路径。由于不考虑 动力学模型和Lyapunov函数设计AUV的三维轨迹 水动力项对AUV的影响,并且AUV没有横向推进 跟踪控制律。 器配置,所以当设定AUV的初始横移速度v=0时, 1.2海流环境下的运动学方程 AUV的横移速度始终保持为零。 设惯性坐标系下海流速度为[UU,U]',则 如式(2),期望轨迹与实际AUV之间的位姿误 海流速度由惯性坐标系到载体坐标系的转换矩阵为 差向量为e,=【exe,e:ewe】T,轨迹跟踪控 「cos drcos8-sinψcosψsin8 制即设计适当的控制量,使得在一定的时间内,AUV J=sin ucos 0 cos sin usin 0 的期望轨迹与实际AUV之间的误差能逐渐趋向于 sin 0 0 cos 0 零,即[e.e,e:ewe]I→0。AUV轨迹跟踪 设海流在载体坐标系上的速度为 控制系统如图3所示。AUV实际位置与期望轨迹 [u。.o]T,则AUV相对于海流的速度为 的误差[e.g,e:e。e]T,经生物启发神经动 [ua。wa]T=[u-uv-ve0-we]T,即 力学模型,得到虚拟的中间速度变量V,= [ua va wa]= [VVV。VV】T,经反步控制得到轨迹 u -U,cos ucos 0 +U,sin -U.cos usin 0 跟踪的运动学控制律[uTq]T,乘以转换矩 -U,sin ucos a-U,cos-U.sin ursin 6 阵J并积分,得到AUV下一时刻的位姿矢量。 w +U.sin 0-U.cos 0 路径规划 生物启发神经 反步控制器 动力学模型 图3系统工作图 Fig.3 The system working drawing 2.2生物启发神经动力学模型 本文中的生物启发神经动力学模型的作用有: :-(E,+V)8。+(E-V)8 Cm dt 1)通过位姿与误差信号,有控制器产生虚拟离散轨 (Eg+V)g 迹;2)构造虚拟中间误差,即使速度有跳变,系统输 式中:参数E,E、E:分别是负漏极电流、钠离子、 出结果也能较平滑。 钾离子和在细胞膜中相应的能量,g,g8:分别是 生物启发神经动力学模型是生物膜电压模型, 负极、钠、钾的导纳,Cm是膜电势。若令Cm=1,?= 整个膜电压的状态5]可表示为 Ep Vm,A=gp,B=ENa +Ep,D=Et -Ep,S*=gNa,eη = ez ey ez eψ eθ é ë ê ê ê ê ê ê êê ù û ú ú ú ú ú ú úú = x - xd y - yd z - zd ψ - ψd θ - θd é ë ê ê ê ê ê ê êê ù û ú ú ú ú ú ú úú (2) 对式(2)求时间导数并化简,得: e · η = ucos ψcos θ - vsin ψ + wcos ψsin θ - x · d usin ψcos θ + vcos ψ + wsin ψsin θ - y · d - usin θ + wcos θ - z · d r/ cos θ - ψ · d q - θ · d é ë ê ê ê ê ê ê ê ê ê ù û ú ú ú ú ú ú ú ú ú (3) 本文在反步方法的基础上,结合生物启发神经 动力学模型和 Lyapunov 函数设计 AUV 的三维轨迹 跟踪控制律。 1.2 海流环境下的运动学方程 设惯性坐标系下海流速度为 [Ux Uy Uz] T ,则 海流速度由惯性坐标系到载体坐标系的转换矩阵为 J = cos ψcos θ - sin ψ cos ψsin θ sin ψcos θ cos ψ sin ψsin θ - sin θ 0 cos θ é ë ê ê êê ù û ú ú úú 设 海 流 在 载 体 坐 标 系 上 的 速 度 为 uc v [ c wc ] T , 则 AUV 相 对 于 海 流 的 速 度 为 uci v [ ci wci] T = u - uc v - v [ c w - wc ] T ,即 uci v [ ci wci] T = u - Ux cos ψcos θ + Uy sin ψ - Uz cos ψsin θ v - Ux sin ψcos θ - Uy cos ψ - Uz sin ψsin θ w + Ux sin θ - Uz cos θ é ë ê ê ê ê ù û ú ú ú ú (4) 结合式(1)和(4)得到海流环境下 AUV 的运动 学方程为 η · = x · y · z · ψ · θ · [ ] T = cos ψcos θ - sin ψ cos ψsin θ 0 0 sin ψcos θ cos ψ sin ψsin θ 0 0 - sin θ 0 cos θ 0 0 0 0 0 1/ cos θ 0 0 0 0 0 1 é ë ê ê ê ê ê ê ê ù û ú ú ú ú ú ú ú uci vci wci r q é ë ê ê ê ê ê ê ê ù û ú ú ú ú ú ú ú 2 轨迹跟踪控制律的设计 2.1 控制器设计问题描述 令 [xd yd zd ψd θ d ] T 为 AUV 的期望位姿 矢量,即为 AUV 需要跟踪的参考路径。 由于不考虑 水动力项对 AUV 的影响,并且 AUV 没有横向推进 器配置,所以当设定 AUV 的初始横移速度 v = 0 时, AUV 的横移速度始终保持为零。 如式(2),期望轨迹与实际 AUV 之间的位姿误 差向量为 eη = ex ey ez eψ e [ θ ] T ,轨迹跟踪控 制即设计适当的控制量,使得在一定的时间内,AUV 的期望轨迹与实际 AUV 之间的误差能逐渐趋向于 零,即 ex ey ez eψ e [ θ ] T → 0。 AUV 轨迹跟踪 控制系统如图 3 所示。 AUV 实际位置与期望轨迹 的误差 ex ey ez eψ e [ θ ] T ,经生物启发神经动 力 学 模 型, 得 到 虚 拟 的 中 间 速 度 变 量 Vs = [Vsx Vsy Vsz Vsψ Vsθ ] T ,经反步控制得到轨迹 跟踪的运动学控制律 [u w r q] T ,乘以转换矩 阵 J 并积分,得到 AUV 下一时刻的位姿矢量。 图 3 系统工作图 Fig.3 The system working drawing 2.2 生物启发神经动力学模型 本文中的生物启发神经动力学模型的作用有: 1)通过位姿与误差信号,有控制器产生虚拟离散轨 迹;2)构造虚拟中间误差,即使速度有跳变,系统输 出结果也能较平滑。 生物启发神经动力学模型是生物膜电压模型, 整个膜电压的状态[1 5 ]可表示为 Cm dVm dt = - (Ep + Vm )gp + (ENa - Vm )gNa - (Ek + Vm )gk 式中:参数 Ep、ENa 、Ek 分别是负漏极电流、钠离子、 钾离子和在细胞膜中相应的能量, gp、gNa 、gk 分别是 负极、钠、钾的导纳, Cm 是膜电势。 若令 Cm = 1, ζ = Ep + Vm , A = gp, B = ENa + Ep, D = Ek - Ep, S + = gNa , ·182· 智 能 系 统 学 报 第 9 卷