正在加载图片...
·784· 智能系统学报 第15卷 V2(t)=p(t)'Qp(t)-p(t-h)Qp(t-h)= 31含固定时延的系统 Yo Yo']o Y() 假设智能体初始状态x(0)=[30-10010 02 (22) Y(-h)u -153「,智能体系统的连接权重如图1。E= Q12 Y(t-h) Y(t-h) On Y(t-h) max =3,则根据定理1可得t0<026s,分 V;(t)=hp(t)"Wp(t)-p(s)"Wp(s)dss 别取时延t0=0.1s、t0=0.25s、t0=0.3s进行仿 W22 真,如图2所示。 W11W2 W> 30 Agentl (23) Agent2 .0= -'z(dwo- 20 Agent3 Agent4 Agent5 -Agent6 10 -Y(-T())LDTZLDY(-T())- 0 系hror-frozo-Co (24) -10 结合式(21)(24)整理得: V(t)≤ξ(t)中E(t) -2 0 1015 20 25 其中 (a)to=0.1 s 5)=[Y(0Y(t-t(0)FYt-h) e-「Ysrd 30 —Agentl i-h -Agent2 若式(14)、(15)成立,则有(①<0,这意味着 0 Agent3 Agent4 系统式(13)是渐近稳定的,即系统式(1)可以在 Agent5 Agent6 控制协议式(3)下达到二分一致性。 10 3数值仿真分析 本文考虑有6个智能体,且其通信拓扑如图1 -10 所示。且V1={化,2,hV2={化4,s,6h满足结构平衡。 20 0 5 1015 2025 ts (b)t=0.25s 30 -Agentl Agent2 20 Agent3 ·Agent4 Agent5 10 Agent6 .. 1 0 图1多智能系统通信拓扑图 Fig.1 Communication topology of multi-agent systems -10 AAAA 由图1可写出拉普拉斯矩阵L: 1 -100 01 -20 -1 2 -1 0 0 0 U 10 15 20 25 -1 -1 3 1 0 0 L= 0 0 1 3 1 (25) (c)6=0.3s 0 0 0 2 1 2 图2固定时延条件下智能体状态 0 0 0 Fig.2 States of multi-agents with fixed-time delaysV˙ 2 (t) = ρ(t) TQρ(t)−ρ(t−h) TQρ(t−h) = [ Y (t) T Y˙ (t) T ] [ Q11 Q12 ∗ Q22 ] [ Y (t) Y˙ (t) ] − [ Y (t−h) Y˙ (t−h) ]T [ Q11 Q12 ∗ Q22 ] [ Y (t−h) Y˙ (t−h) ] (22) V˙ 3 (t) = hρ(t) TWρ(t)− ∫ t t−h ρ(s) TWρ(s)ds ⩽ h [ Y (t) TY˙ (t) T ] [ W11 W12 ∗ W22 ] [ Y (t) Y˙ (t) ] − 1 h ∫ t t−h [ Y (s) Y˙ (s) ]T ds [ W11 W12 ∗ W22 ]∫ t t−h [ Y (s) Y˙ (s) ] ds (23) V˙ 4 (t) = h 2 2 Y˙ (t) T ZY˙ (t)− ∫ 0 −h ∫ t t+θ Y˙ (s) T ZY˙ (s)dsdθ− ∫ 0 −h ∫ t t+θ Y˙ (s) T ZY˙ (s)dsdθ ⩽ h 2 2 Y (t−τ(t))T LD T ZLDY (t−τ(t))− 2 h 2 {[hY (t) T − ∫ t t−h Y (s) T ds ] Z [ hY (t)− ∫ t t−h Y (s)ds ]} (24) 结合式 (21)~(24) 整理得: V˙ (t) ⩽ ξ (t) Tψξ (t) 其中 ξ (t) = [Y (t) T Y (t−τ(t))T Y (t−h) T Y˙ (t−h) T ∫ t t−h Y (s) T ds] T V˙ 若式 (14)、(15) 成立,则有 (t) < 0 ,这意味着 系统式 (13) 是渐近稳定的,即系统式 (1) 可以在 控制协议式 (3) 下达到二分一致性。 3 数值仿真分析 V1 = {v1, v2, v3} V2 = {v4, v5, v6} 本文考虑有 6 个智能体,且其通信拓扑如图 1 所示。且 , ,满足结构平衡。 1 1 −1 1 2 3 4 1 5 6 1 1 1 图 1 多智能系统通信拓扑图 Fig. 1 Communication topology of multi-agent systems 由图 1 可写出拉普拉斯矩阵 L: L = 2 −1 −1 −1 2 −1 −1 −1 3 0 0 1 0 0 1 3 0 0 0 −1 0 0 0 −1 0 0 0 −1 2 −1 0 0 0 −1 −1 2 (25) 3.1 含固定时延的系统 x(0) = [30 −10 0 10 −15 3]T E = max ∑ vjϵNi
ai j
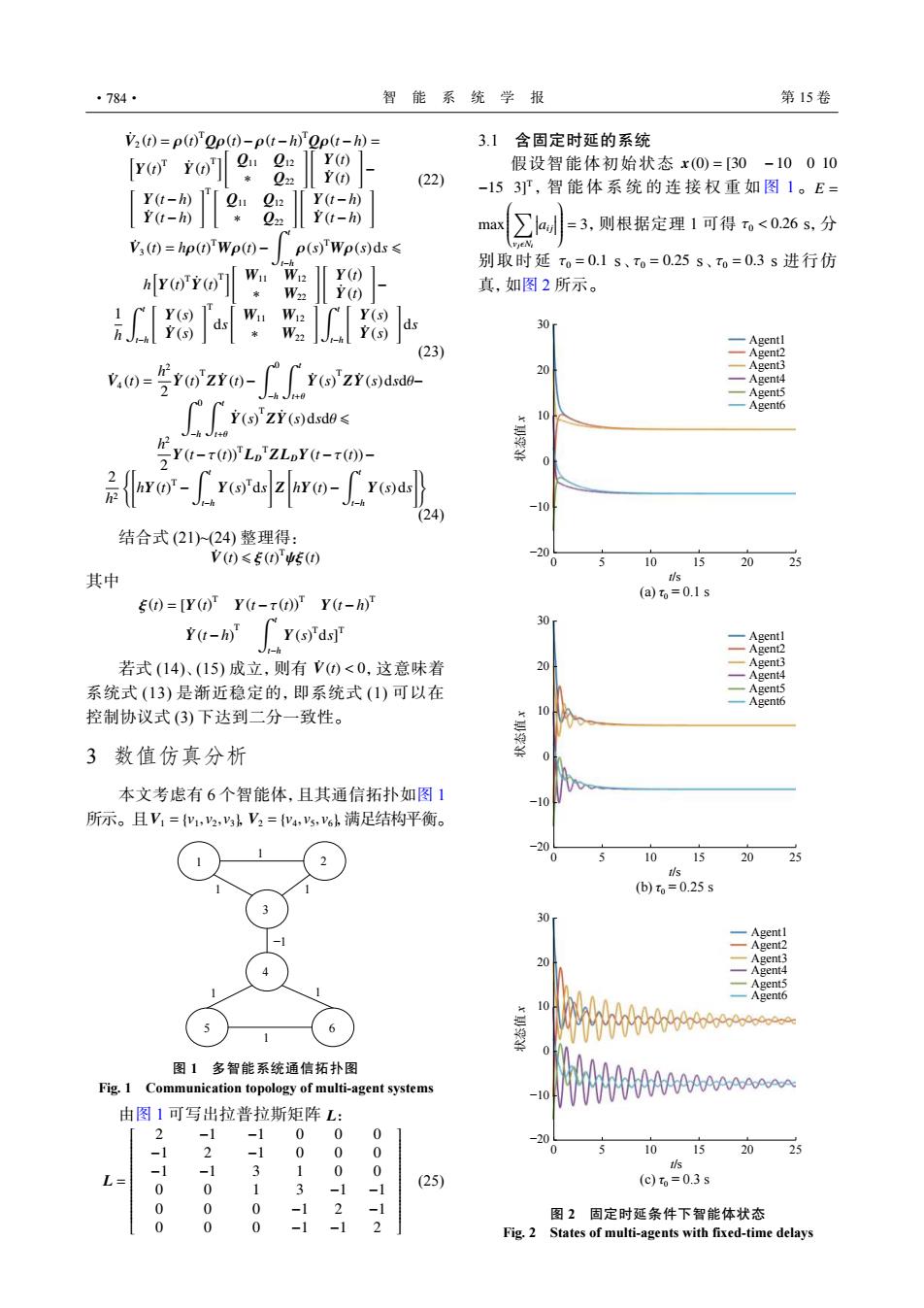
= 3 τ0 < 0.26 τ0 = 0.1 τ0 = 0.25 τ0 = 0.3 假设智能体初始状态 ,智能体系统的连接权重如 图 1。 ,则根据定理 1 可得 s,分 别取时延 s、 s、 s 进行仿 真,如图 2 所示。 Agent1 Agent2 Agent3 Agent4 Agent5 Agent6 Agent1 Agent2 Agent3 Agent4 Agent5 Agent6 Agent1 Agent2 Agent3 Agent4 Agent5 Agent6 −20 −10 0 0 5 10 15 20 25 10 20 30 状态值 x t/s −20 −10 0 0 5 10 15 20 25 10 20 30 状态值 x t/s −20 −10 0 0 5 10 15 20 25 10 20 30 状态值 x t/s (a) τ0 = 0.1 s (b) τ0 = 0.25 s (c) τ0 = 0.3 s 图 2 固定时延条件下智能体状态 Fig. 2 States of multi-agents with fixed-time delays ·784· 智 能 系 统 学 报 第 15 卷