正在加载图片...
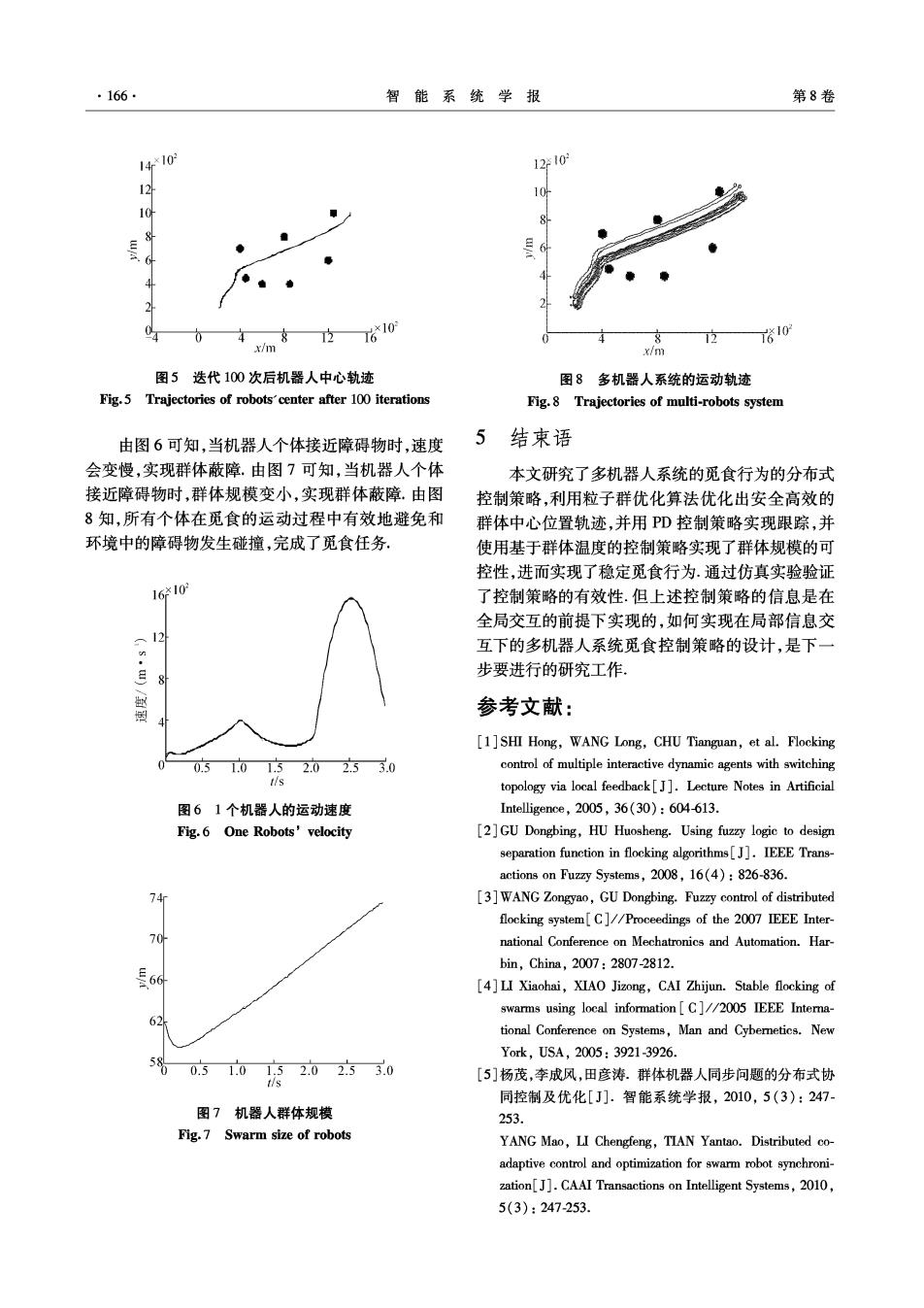
·166 智能系统学报 第8卷 *10 12ě102 10 10 4 8 12 7610 x/m 12610 x/m 图5迭代100次后机器人中心轨迹 图8多机器人系统的运动轨迹 Fig.5 Trajectories of robots center after 100 iterations Fig.8 Trajectories of multi-robots system 由图6可知,当机器人个体接近障碍物时,速度 5结束语 会变慢,实现群体蔽障.由图7可知,当机器人个体 本文研究了多机器人系统的觅食行为的分布式 接近障碍物时,群体规模变小,实现群体蔽障。由图 控制策略,利用粒子群优化算法优化出安全高效的 8知,所有个体在觅食的运动过程中有效地避免和 群体中心位置轨迹,并用PD控制策略实现跟踪,并 环境中的障碍物发生碰撞,完成了觅食任务。 使用基于群体温度的控制策略实现了群体规模的可 控性,进而实现了稳定觅食行为.通过仿真实验验证 16×10 了控制策略的有效性.但上述控制策略的信息是在 全局交互的前提下实现的,如何实现在局部信息交 12 互下的多机器人系统觅食控制策略的设计,是下一 步要进行的研究工作。 参考文献: [1]SHI Hong,WANG Long,CHU Tianguan,et al.Flocking 00.51.01.52.02.53.0 control of multiple interactive dynamic agents with switching s topology via local feedback[].Lecture Notes in Artificial 图61个机器人的运动速度 Intelligence,2005,36(30):604-613. Fig.6 One Robots'velocity [2]GU Dongbing,HU Huosheng.Using fuzzy logic to design separation function in flocking algorithms[J].IEEE Trans- actions on Fuzzy Systems,2008,16(4):826-836. 74 [3]WANG Zongyao,GU Dongbing.Fuzzy control of distributed flocking system[C]//Proceedings of the 2007 IEEE Inter- 70 national Conference on Mechatronics and Automation.Har- bin,China,2007:2807-2812. 366 [4]LI Xiaohai,XIAO Jizong,CAI Zhijun.Stable flocking of swarms using local information [C]//2005 IEEE Intera- 62 tional Conference on Systems,Man and Cybernetics.New York,USA,2005:39213926. 5%0内10府202本30 [5]杨茂,李成风,田彦祷.群体机器人同步问题的分布式协 同控制及优化[J].智能系统学报,2010,5(3):247- 图7机器人群体规模 253. Fig.7 Swarm size of robots YANG Mao,LI Chengfeng,TIAN Yantao.Distributed co- adaptive control and optimization for swarm robot synchroni- zation[J].CAAI Transactions on Intelligent Systems,2010, 5(3):247-253