正在加载图片...
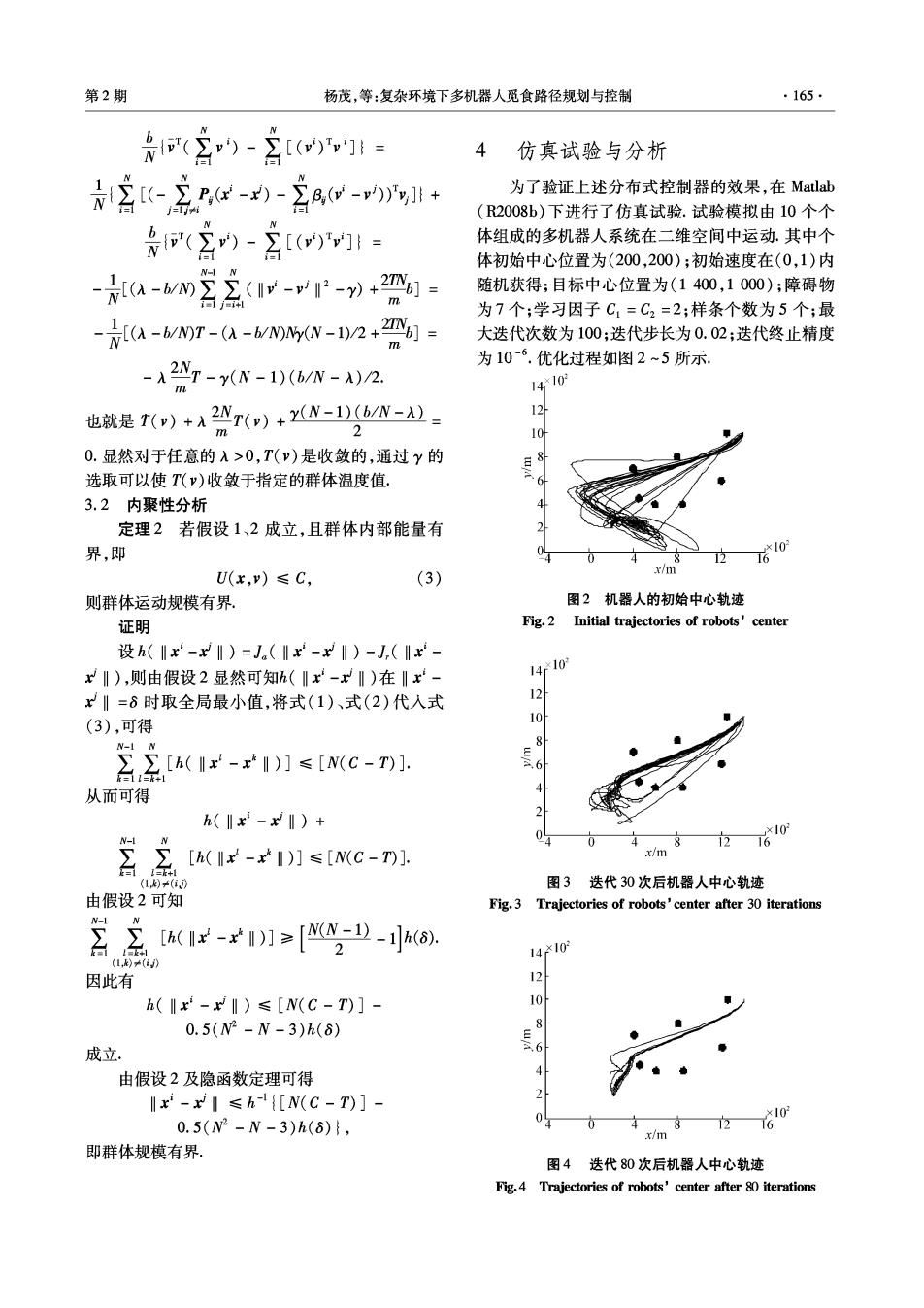
第2期 杨茂,等:复杂环境下多机器人觅食路径规划与控制 ·165· A(宫)-宫1 4 仿真试验与分析 8-Ad0-含ar-+ 为了验证上述分布式控制器的效果,在Matlab (2008b)下进行了仿真试验.试验模拟由10个个 (宫)-含(ww] 体组成的多机器人系统在二维空间中运动.其中个 体初始中心位置为(200,200);初始速度在(0,1)内 a-m宫盆-P-+划= N-I N 随机获得;目标中心位置为(1400,1000);障碍物 为7个;学习因子C1=C2=2;样条个数为5个;最 -H[(A-W/N)T-(A-W/NDNy(N-1)/2+]= 大迭代次数为100;迭代步长为0.02;迭代终止精度 为10-6.优化过程如图2~5所示. -a2T-Y(N-1)(b/N-)2. m 1410 也就是T()+A2WT(v)+YN-1)(b/N-2 m 0.显然对于任意的入>0,T()是收敛的,通过y的 选取可以使T()收敛于指定的群体温度值, 3.2内聚性分析 定理2若假设1、2成立,且群体内部能量有 界,即 x/m 6*10 U(x,)≤C, (3) 则群体运动规模有界。 图2机器人的初始中心轨迹 证明 Fig.2 Initial trajectories of robots'center 设h(‖x-x‖)=J.(Ix-xl)-J,(Ix- xI),则由假设2显然可知h(Ix-xI)在‖x- 14r产10 :‖=6时取全局最小值,将式(1)、式(2)代入式 12 (3),可得 10 N-1 N 8/ 名,A[Ir-rI]≤[C-], E 含6 从而可得 4 h(Ix-x‖)+ 名名 4 [h()][N(C-T)] 82610 x/m (1k)*(i》 图3迭代30次后机器人中心轨迹 由假设2可知 Fig.3 Trajectories of robots'center after 30 iterations (12-I】≥2-6 (1,(》 14*10 因此有 12 h(Ix-x‖)≤[N(C-T)] 0.5(N2-N-3)h(6) 成立. 三6 由假设2及隐函数定理可得 Ix-x‖≤h4{[N(C-T)] 0.5(N2-N-3)h(6), x/m 即群体规模有界. 图4迭代80次后机器人中心轨迹 Fig.4 Trajectories of robots'center after 80 iterations