正在加载图片...
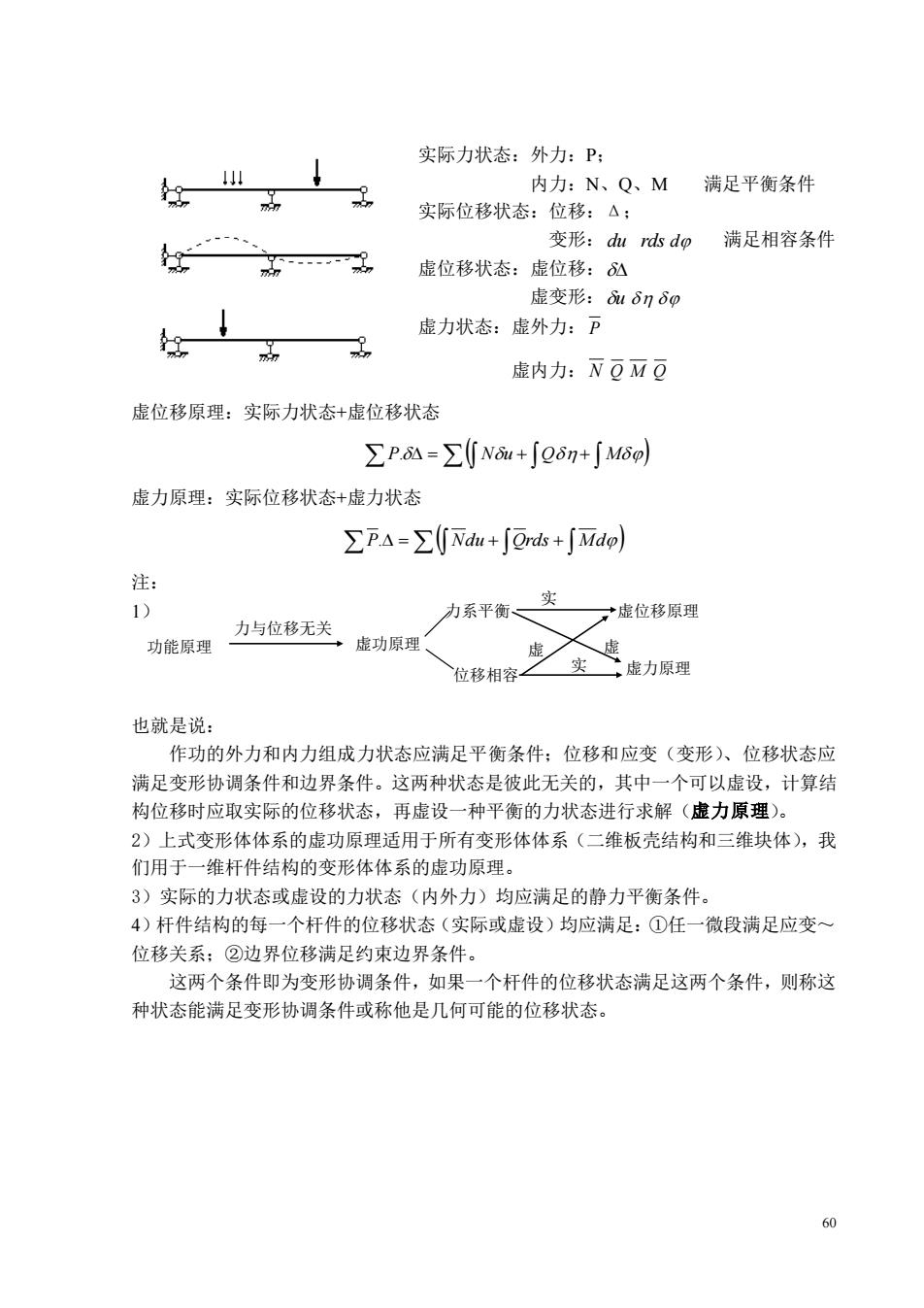
实际力状态:外力:P: 3 内力:N、Q、M满足平衡条件 实际位移状态:位移:△; 变形:du rdsdo 满足相容条件 虚位移状态:虚位移:汹 虚变形:u6n60 虚力状态:虚外力:P 虚内力:NQM可 虚位移原理:实际力状态+虚位移状态 ∑P8M=∑[Nu+「Q6n+「M6p) 虚力原理:实际位移状态+虚力状态 ∑p.△=∑[Ndu+[Ords+[Mdo 注 1 实 功能原理力与位移无关 力系平衡 一虚位移原理 虚功原理 位移相容 力原 也就是说: 作功的外力和内力组成力状态应满足平衡条件:位移和应变(变形)、位移状态应 满足变形协调条件和边界条件。这两种状态是彼此无关的,其中一个可以虚设,计算结 构位移时应取实际的位移状态,再虚设一种平衡的力状态进行求解(虚力原理)。 2)上式变形体体系的虚功原理适用于所有变形体体系(二维板壳结构和三维块体),我 们用于一维杆件结构的变形体体系的虚功原理。 3)实际的力状态或虚设的力状态(内外力)均应满足的静力平衡条件。 4)杆件结构的每一个杆件的位移状态(实际或虚设)均应满足:①任一微段满足应变~ 位移关系:②边界位移满足约束边界条件。 这两个条件即为变形协调条件,如果一个杆件的位移状态满足这两个条件,则称这 种状态能满足变形协调条件或称他是几何可能的位移状态。 6060 实际力状态:外力:P; 内力:N、Q、M 满足平衡条件 实际位移状态:位移:Δ; 变形: du rds d 满足相容条件 虚位移状态:虚位移: 虚变形: u 虚力状态:虚外力: P 虚内力: N Q M Q 虚位移原理:实际力状态+虚位移状态 ( ) P. = Nu + Q + M 虚力原理:实际位移状态+虚力状态 ( ) P. = Ndu + Qrds + Md 注: 1) 也就是说: 作功的外力和内力组成力状态应满足平衡条件;位移和应变(变形)、位移状态应 满足变形协调条件和边界条件。这两种状态是彼此无关的,其中一个可以虚设,计算结 构位移时应取实际的位移状态,再虚设一种平衡的力状态进行求解(虚力原理)。 2)上式变形体体系的虚功原理适用于所有变形体体系(二维板壳结构和三维块体),我 们用于一维杆件结构的变形体体系的虚功原理。 3)实际的力状态或虚设的力状态(内外力)均应满足的静力平衡条件。 4)杆件结构的每一个杆件的位移状态(实际或虚设)均应满足:①任一微段满足应变~ 位移关系;②边界位移满足约束边界条件。 这两个条件即为变形协调条件,如果一个杆件的位移状态满足这两个条件,则称这 种状态能满足变形协调条件或称他是几何可能的位移状态。 功能原理 力与位移无关 虚功原理 力系平衡 位移相容 虚位移原理 虚力原理 实 实 虚 虚