正在加载图片...
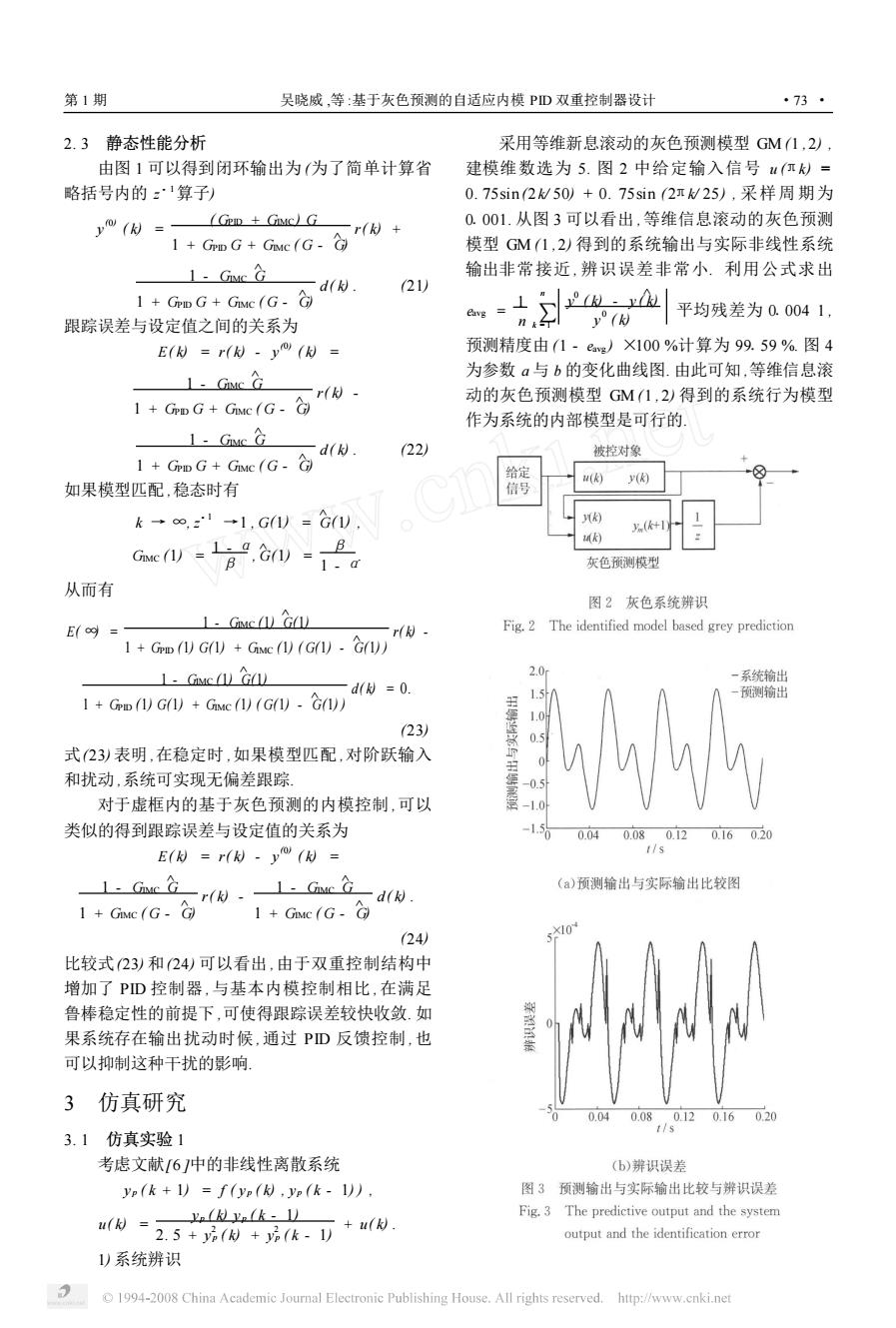
第1期 吴晓威,等:基于灰色预测的自适应内模PD双重控制器设计 ·73 2.3静态性能分析 采用等维新息滚动的灰色预测模型GM(1,2), 由图1可以得到闭环输出为(为了简单计算省 建模维数选为5.图2中给定输入信号“mk)= 略括号内的z1算子) 0.75sin(2M50)+0.75sin(2rM25),采样周期为 yO(付=LGD+GiC)G r(+ 0.001.从图3可以看出,等维信息滚动的灰色预测 1+GPID G+GMC(G-G) 模型GM(1,2)得到的系统输出与实际非线性系统 1.Gisc 输出非常接近,辨识误差非常小.利用公式求出 d(k 21) 1+GPIDG+GIMC(G-G) 平均残差为0.0041, 跟踪误差与设定值之间的关系为 ny°(材 E(W=r(材-y0(付= 预测精度由1-ee)×100%计算为99.59%.图4 1-GiMc G 为参数a与b的变化曲线图.由此可知,等维信息滚 r(k- 动的灰色预测模型GM(1,2)得到的系统行为模型 1+GPD G+GMC (G-G) 作为系统的内部模型是可行的, 1-Give d(k 22) 被控对象 1+GPID G+GMc(G-G) 给定 y(k) 如果模型匹配,稳态时有 信号 k→∞,z1→1,G1)=G) cw-合aW=2 ) 灰色预测模型 从而有 图2灰色系统辨识 1-Gc(D)G(D) E(o9 Fig.2 The identified model based grey prediction 1+GPID (1)G(1)GMc (1)(G(1)-G(1)) 1.Guc(D)G( 2. 系统输出 d=0. 1+GP(1)G(1)GMc(1)(G(1)-G(1) (23) 0.5 式23)表明,在稳定时,如果模型匹配,对阶跃输入 和扰动,系统可实现无偏差跟踪 0.5 对于虚框内的基于灰色预测的内模控制,可以 类似的得到跟踪误差与设定值的关系为 0.04 0.080.12 0.160.20 E(W=r(-y(材= 1/s 1-Gouc -r()-1-Guc (a)预测输出与实际输出比较图 1+GiMc(G-G 1 Gose (G. -d( (24) x10 比较式23)和24)可以看出,由于双重控制结构中 增加了PD控制器,与基本内模控制相比,在满足 鲁棒稳定性的前提下,可使得跟踪误差较快收敛.如 果系统存在输出扰动时候,通过PD反馈控制,也 可以抑制这种干扰的影响」 3仿真研究 0.04 0.080120.160.20 3.1仿真实验1 t/s 考虑文献[6中的非线性离散系统 (b)辨识误差 yp(k +1)f(ye(k).yp(k-1)). 图3预测输出与实际输出比较与辨识误差 vo(k)ynck-1 Fig.3 The predictive output and the system 州=2.5十房利+房k.D+0, output and the identification error 1)系统辨识 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net2. 3 静态性能分析 由图 1 可以得到闭环输出为 (为了简单计算省 略括号内的 z - 1算子) y (0) ( k) = ( GPID + GIMC ) G 1 + GPID G + GIMC ( G - G ^ ) r( k) + 1 - GIMC G ^ 1 + GPID G + GIMC ( G - G ^ ) d ( k) . (21) 跟踪误差与设定值之间的关系为 E( k) = r( k) - y (0) ( k) = 1 - GIMC G ^ 1 + GPID G + GIMC ( G - G ^ ) r( k) - 1 - GIMC G ^ 1 + GPID G + GIMC ( G - G ^ ) d ( k) . (22) 如果模型匹配 ,稳态时有 k → ∞, z - 1 →1 , G(1) = G ^ (1) , GIMC (1) = 1 - α β , G ^ (1) = β 1 - α . 从而有 E( ∞) = 1 - GIMC (1) G ^ (1) 1 + GPID (1) G(1) + GIMC (1) ( G(1) - G ^ (1) ) r( k) - 1 - GIMC (1) G ^ (1) 1 + GPID (1) G(1) + GIMC (1) ( G(1) - G ^ (1) ) d( k) = 0. (23) 式(23) 表明 ,在稳定时 ,如果模型匹配 ,对阶跃输入 和扰动 ,系统可实现无偏差跟踪. 对于虚框内的基于灰色预测的内模控制 ,可以 类似的得到跟踪误差与设定值的关系为 E( k) = r( k) - y (0) ( k) = 1 - GIMC G ^ 1 + GIMC ( G - G ^ ) r( k) - 1 - GIMC G ^ 1 + GIMC ( G - G ^ ) d ( k) . (24) 比较式(23) 和(24) 可以看出 ,由于双重控制结构中 增加了 PID 控制器 ,与基本内模控制相比 ,在满足 鲁棒稳定性的前提下 ,可使得跟踪误差较快收敛. 如 果系统存在输出扰动时候 ,通过 PID 反馈控制 ,也 可以抑制这种干扰的影响. 3 仿真研究 3. 1 仿真实验 1 考虑文献[6 ]中的非线性离散系统 y p ( k + 1) = f ( y p ( k) , y p ( k - 1) ) , u( k) = y p ( k) y p ( k - 1) 2. 5 + y 2 p ( k) + y 2 p ( k - 1) + u( k) . 1) 系统辨识 采用等维新息滚动的灰色预测模型 GM (1 ,2) , 建模维数选为 5. 图 2 中给定输入信号 u (πk) = 0. 75sin (2 k/ 50) + 0. 75sin ( 2πk/ 25) , 采样周期为 01001. 从图 3 可以看出 ,等维信息滚动的灰色预测 模型 GM (1 , 2) 得到的系统输出与实际非线性系统 输出非常接近 , 辨识误差非常小. 利用公式求出 eavg = 1 n ∑ n k = 1 y 0 ( k) - y ( k) ^ y 0 ( k) 平均残差为 01004 1 , 预测精度由 (1 - eavg ) ×100 %计算为 99159 %. 图 4 为参数 a 与 b 的变化曲线图. 由此可知 ,等维信息滚 动的灰色预测模型 GM (1 , 2) 得到的系统行为模型 作为系统的内部模型是可行的. 第 1 期 吴晓威 ,等 :基于灰色预测的自适应内模 PID 双重控制器设计 · 37 ·