正在加载图片...
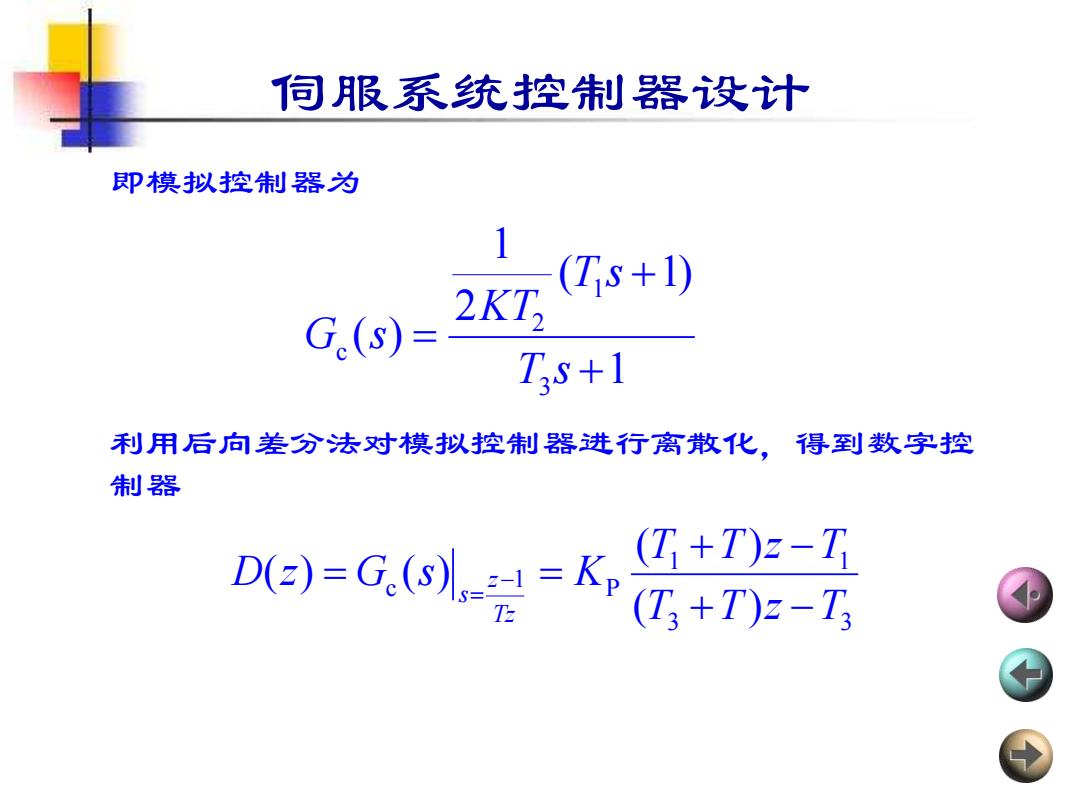
同服系统控制器设计 即模拟控制器为 (Ts+1) 2KT G(S)= T3s+1 利用后向差分法对模拟控制器进行离散化,得到数字控 制器 0e)6以+7-7伺服系统控制器设计 即模拟控制器为 利用后向差分法对模拟控制器进行离散化,得到数字控 制器 1 ( 1) 2 1 ( ) 3 1 2 c + + = T s T s KT G s 3 3 1 1 P 1 c ( ) ( ) ( ) ( ) T T z T T T z T D z G s K Tz z s + − + − = − = =