正在加载图片...
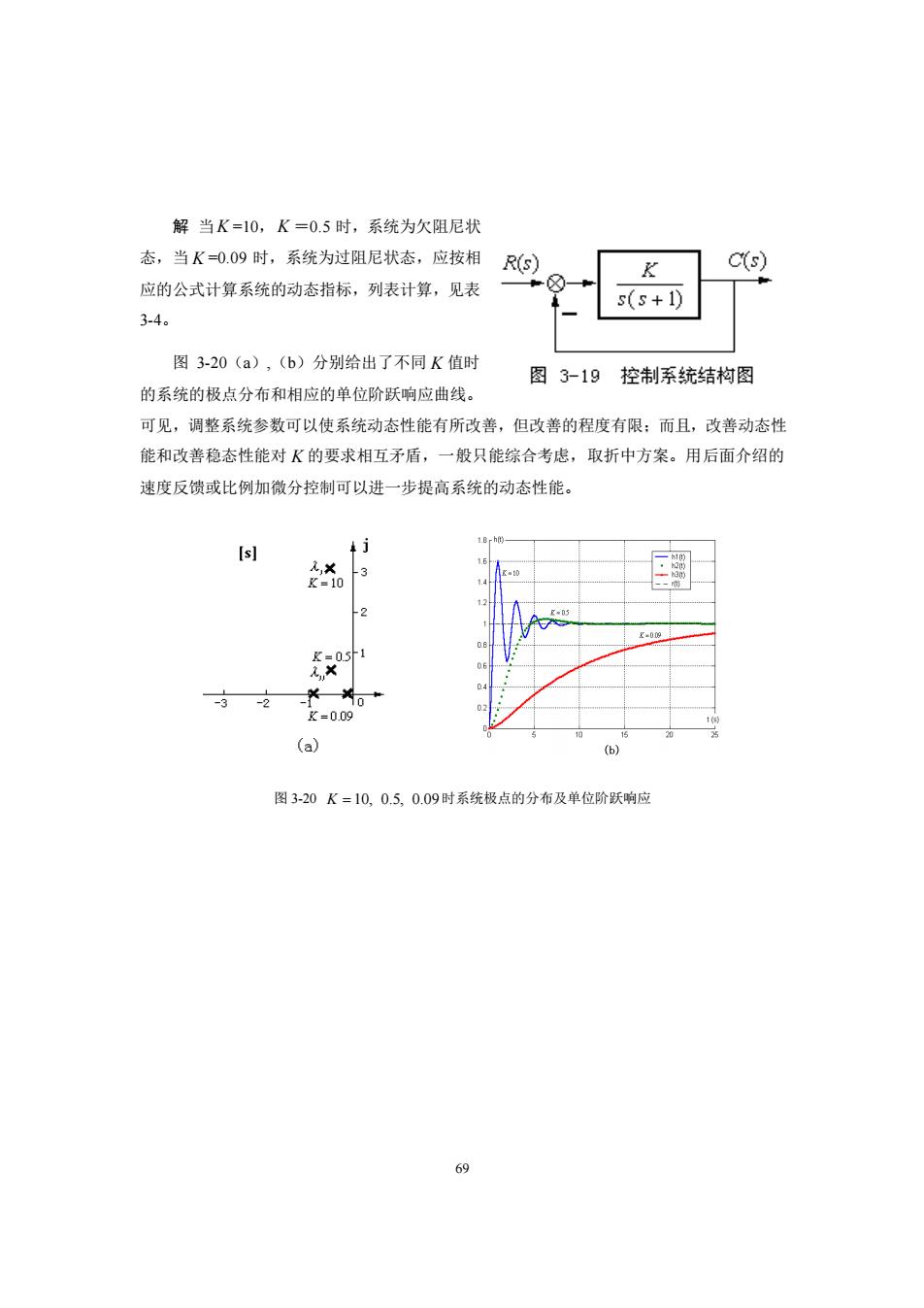
解当K=10,K=0.5时,系统为欠阻尼状 态,当K=0.09时,系统为过阻尼状态,应按相 R(s) C(s) 应的公式计算系统的动态指标,列表计算,见表 s(S+1) 34。 图3-20(a),(b)分别给出了不同K值时 图3-19控制系统结构图 的系统的极点分布和相应的单位阶跃响应曲线。 可见,调整系统参数可以使系统动态性能有所改善,但改善的程度有限:而且,改善动态性 能和改善稳态性能对K的要求相互矛盾,一般只能综合考虑,取折中方案。用后面介绍的 速度反馈或比例加微分控制可以进一步提高系统的动态性能。 [s] 5x0 32 =009 6 图3-20K=10,0.5,0.09时系统极点的分布及单位阶跃响应 69 解 当 K =10,K =0.5 时,系统为欠阻尼状 态,当 K =0.09 时,系统为过阻尼状态,应按相 应的公式计算系统的动态指标,列表计算,见表 3-4。 图 3-20(a),(b)分别给出了不同 K 值时 的系统的极点分布和相应的单位阶跃响应曲线。 可见,调整系统参数可以使系统动态性能有所改善,但改善的程度有限;而且,改善动态性 能和改善稳态性能对 K 的要求相互矛盾,一般只能综合考虑,取折中方案。用后面介绍的 速度反馈或比例加微分控制可以进一步提高系统的动态性能。 图 3-20 K = 10, 0.5, 0.09 时系统极点的分布及单位阶跃响应