正在加载图片...
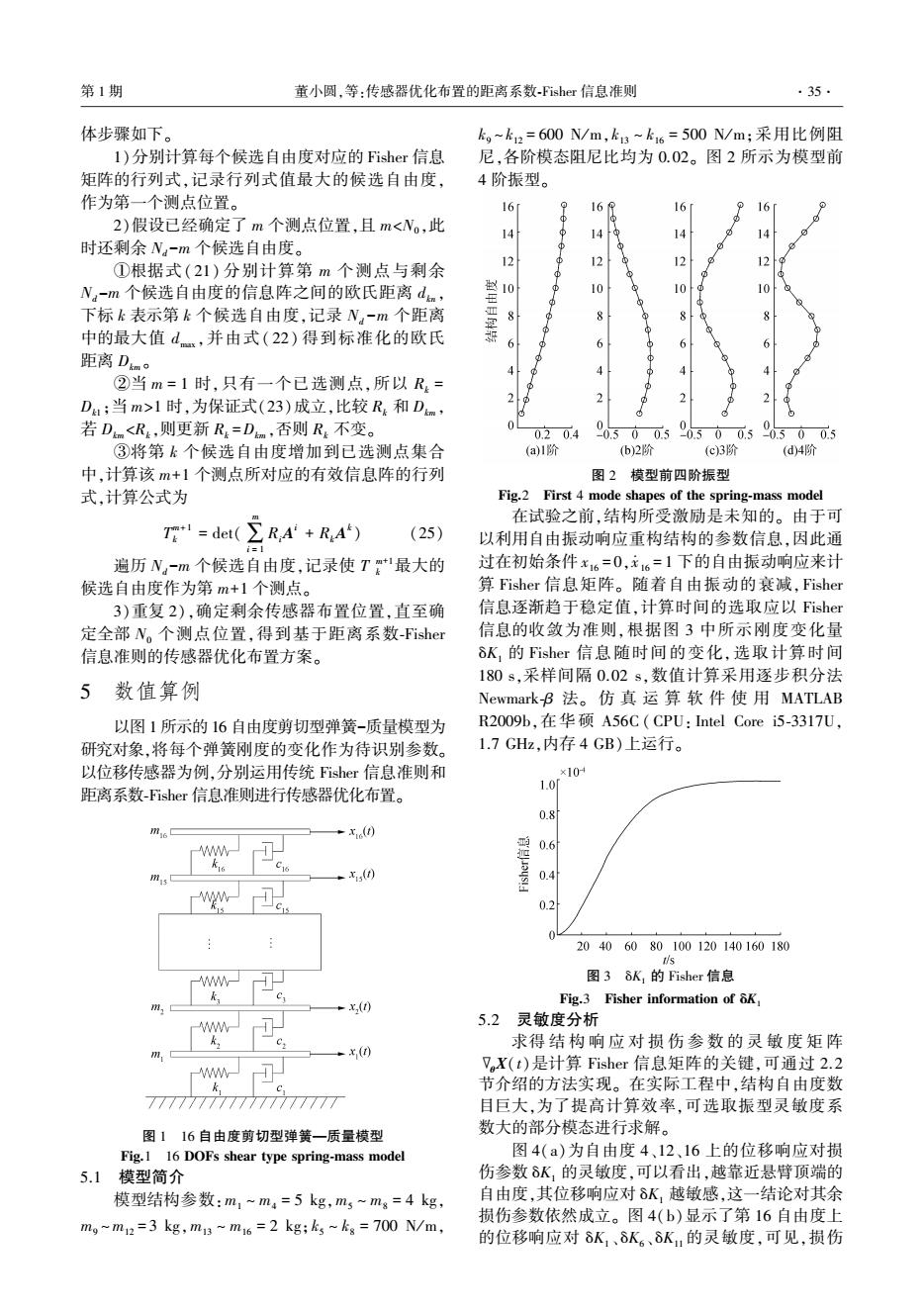
第1期 董小圆,等:传感器优化布置的距离系数-Fisher信息准则 ·35· 体步骤如下。 k~k2=600N/m,k13~k6=500N/m;采用比例阻 I)分别计算每个候选自由度对应的Fisher信息 尼,各阶模态阻尼比均为0.02。图2所示为模型前 矩阵的行列式,记录行列式值最大的候选自由度, 4阶振型。 作为第一个测点位置。 16 16 16 16 2)假设已经确定了m个测点位置,且m<N。,此 14 14 14 14 时还剩余N。-m个候选自由度。 ①根据式(21)分别计算第m个测点与剩余 12 12 12 12 N,-m个候选自由度的信息阵之间的欧氏距离d, 10 中 10 10 10 下标k表示第k个候选自由度,记录N-m个距离 8 8 8 中的最大值d,并由式(22)得到标准化的欧氏 6 6 6 6 距离D。 4 4 4 4 ②当m=1时,只有一个已选测点,所以R= D1;当m>1时,为保证式(23)成立,比较R和Dm, 2 2 e" 若Dm<R,则更新R=Dm,否则R不变。 0 0.204 0300590st0505005 ③将第k个候选自由度增加到已选测点集合 (a)1阶 (b)2阶 (c)3阶 (d)4阶 中,计算该m+1个测点所对应的有效信息阵的行列 图2模型前四阶振型 式,计算公式为 Fig.2 First 4 mode shapes of the spring-mass model 在试验之前,结构所受激励是未知的。由于可 TT1=det(∑R,A+RA) (25) 以利用自由振动响应重构结构的参数信息,因此通 i=1 遍历N,-m个候选自由度,记录使T'最大的 过在初始条件x16=0,元6=1下的自由振动响应来计 候选自由度作为第m+1个测点。 算Fisher信息矩阵。随着自由振动的衰减,Fisher 3)重复2),确定剩余传感器布置位置,直至确 信息逐渐趋于稳定值,计算时间的选取应以isher 定全部N。个测点位置,得到基于距离系数-Fisher 信息的收敛为准则,根据图3中所示刚度变化量 信息准则的传感器优化布置方案。 δK,的Fisher信息随时间的变化,选取计算时间 180s,采样间隔0.02s,数值计算采用逐步积分法 5数值算例 Newmark-B法。仿真运算软件使用MATLAB 以图1所示的16自由度剪切型弹簧-质量模型为 R2009%,在华硕A56C(CPU:intel Core i5-3317U, 研究对象,将每个弹簧刚度的变化作为待识别参数。 1.7GHz,内存4GB)上运行。 以位移传感器为例,分别运用传统Fisher信息准则和 ×10 距离系数-Fisher信息准则进行传感器优化布置。 10 0.8 m =x() Aw 頭0.6 c -x(1) 04 0.2 04 20406080100120140160180 WMwJ 图38K,的Fisher信息 Fig.3 Fisher information of 6K +x(t0 W 5.2灵敏度分析 求得结构响应对损伤参数的灵敏度矩阵 m +x() W- 7,X(t)是计算Fisher信息矩阵的关键,可通过2.2 k 节介绍的方法实现。在实际工程中,结构自由度数 7777777777777777777 目巨大,为了提高计算效率,可选取振型灵敏度系 图116自由度剪切型弹簧一质量模型 数大的部分模态进行求解。 Fig.1 16 DOFs shear type spring-mass model 图4(a)为自由度4、12、16上的位移响应对损 5.1 模型简介 伤参数δK,的灵敏度,可以看出,越靠近悬臂顶端的 模型结构参数:m1~m4=5kg,ms~mg=4kg, 自由度,其位移响应对δK,越敏感,这一结论对其余 损伤参数依然成立。图4(b)显示了第16自由度上 mg~m12=3kg,m13~m16=2kg;k~kg=700N/m, 的位移响应对8K、δK、δK,的灵敏度,可见,损伤体步骤如下。 1)分别计算每个候选自由度对应的 Fisher 信息 矩阵的行列式,记录行列式值最大的候选自由度, 作为第一个测点位置。 2)假设已经确定了 m 个测点位置,且 m<N0 ,此 时还剩余 Nd -m 个候选自由度。 ①根据式( 21) 分别计算第 m 个测点与剩余 Nd -m 个候选自由度的信息阵之间的欧氏距离 dkn , 下标 k 表示第 k 个候选自由度,记录 Nd -m 个距离 中的最大值 dmax,并由式( 22) 得到标准化的欧氏 距离 Dkm 。 ②当 m = 1 时,只有一个已选测点,所以 Rk = Dk1 ;当 m>1 时,为保证式(23)成立,比较 Rk 和 Dkm , 若 Dkm <Rk,则更新 Rk =Dkm ,否则 Rk 不变。 ③将第 k 个候选自由度增加到已选测点集合 中,计算该 m+1 个测点所对应的有效信息阵的行列 式,计算公式为 T m+1 k = det(∑ m i = 1 RiA i + RkA k ) (25) 遍历 Nd -m 个候选自由度,记录使 T m+1 k 最大的 候选自由度作为第 m+1 个测点。 3)重复 2),确定剩余传感器布置位置,直至确 定全部 N0 个测点位置,得到基于距离系数⁃Fisher 信息准则的传感器优化布置方案。 5 数值算例 以图 1 所示的 16 自由度剪切型弹簧-质量模型为 研究对象,将每个弹簧刚度的变化作为待识别参数。 以位移传感器为例,分别运用传统 Fisher 信息准则和 距离系数⁃Fisher 信息准则进行传感器优化布置。 图 1 16 自由度剪切型弹簧—质量模型 Fig.1 16 DOFs shear type spring⁃mass model 5.1 模型简介 模型结构参数:m1 ~ m4 = 5 kg,m5 ~ m8 = 4 kg, m9 ~ m12 = 3 kg,m13 ~ m16 = 2 kg;k5 ~ k8 = 700 N/ m, k9 ~ k12 = 600 N/ m,k13 ~ k16 = 500 N/ m;采用比例阻 尼,各阶模态阻尼比均为 0.02。 图 2 所示为模型前 4 阶振型。 图 2 模型前四阶振型 Fig.2 First 4 mode shapes of the spring⁃mass model 在试验之前,结构所受激励是未知的。 由于可 以利用自由振动响应重构结构的参数信息,因此通 过在初始条件 x16 = 0,x · 16 = 1 下的自由振动响应来计 算 Fisher 信息矩阵。 随着自由振动的衰减,Fisher 信息逐渐趋于稳定值,计算时间的选取应以 Fisher 信息的收敛为准则,根据图 3 中所示刚度变化量 δK1 的 Fisher 信息随时间的变化,选取计算时间 180 s,采样间隔 0.02 s,数值计算采用逐步积分法 Newmark⁃β 法。 仿 真 运 算 软 件 使 用 MATLAB R2009b,在华硕 A56C ( CPU: Intel Core i5⁃3317U, 1.7 GHz,内存 4 GB)上运行。 图 3 δK1 的 Fisher 信息 Fig.3 Fisher information of δK1 5.2 灵敏度分析 求得 结 构 响 应 对 损 伤 参 数 的 灵 敏 度 矩 阵 ∇θX(t)是计算 Fisher 信息矩阵的关键,可通过 2.2 节介绍的方法实现。 在实际工程中,结构自由度数 目巨大,为了提高计算效率,可选取振型灵敏度系 数大的部分模态进行求解。 图 4(a)为自由度 4、12、16 上的位移响应对损 伤参数 δK1 的灵敏度,可以看出,越靠近悬臂顶端的 自由度,其位移响应对 δK1 越敏感,这一结论对其余 损伤参数依然成立。 图 4(b)显示了第 16 自由度上 的位移响应对 δK1 、δK6 、δK11的灵敏度,可见,损伤 第 1 期 董小圆,等:传感器优化布置的距离系数⁃Fisher 信息准则 ·35·