正在加载图片...
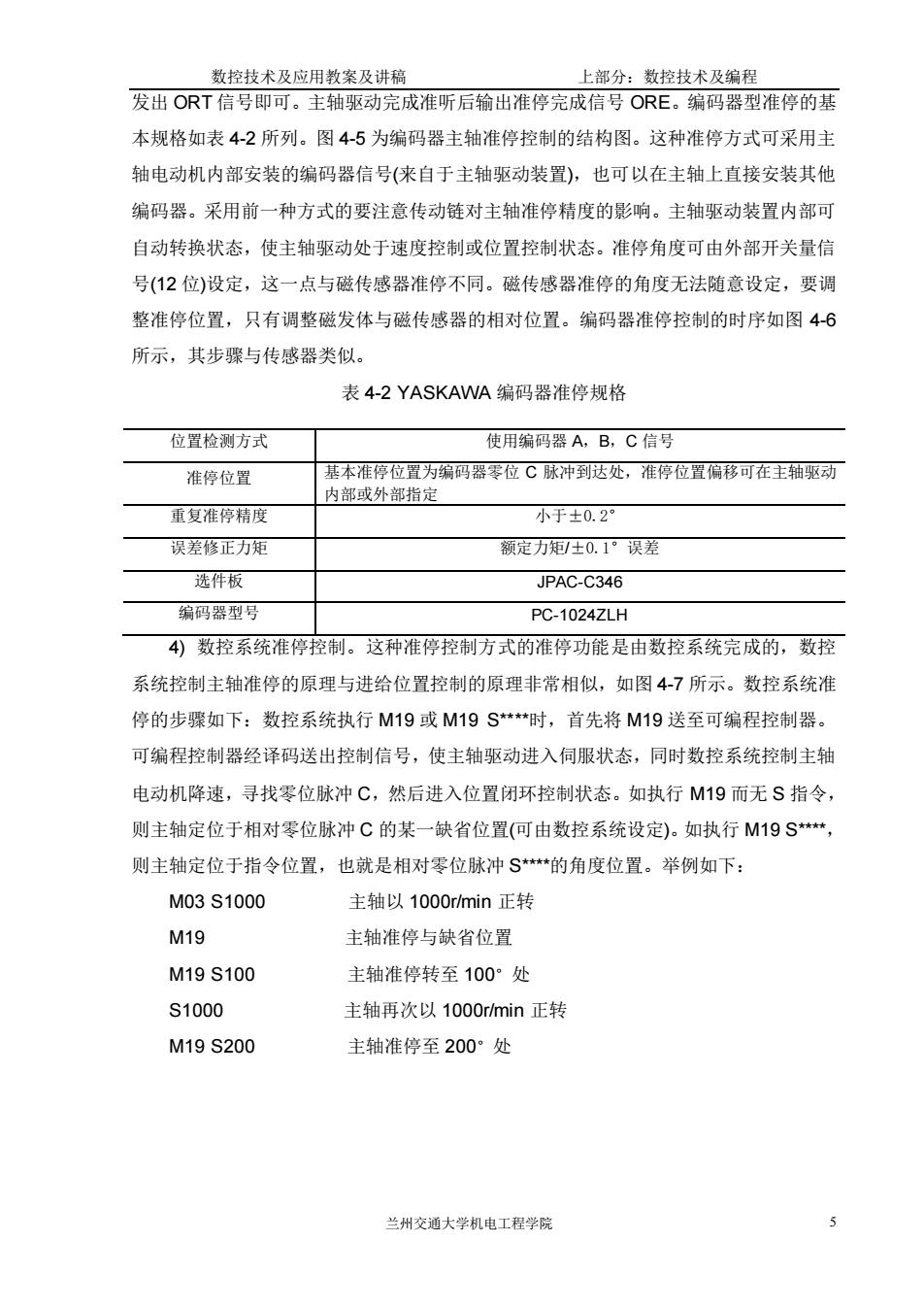
数控技术及应用教案及讲稿 上部分:数控技术及编程 发出ORT信号即可。主轴驱动完成准听后输出准停完成信号O尺E。编码器型准停的基 本规格如表4-2所列。图4-5为编码器主轴准停控制的结构图。这种准停方式可采用主 轴电动机内部安装的编码器信号(来自于主轴驱动装置),也可以在主轴上直接安装其他 编码器。采用前一种方式的要注意传动链对主轴准停精度的影响。主轴驱动装置内部可 自动转换状态,使主轴驱动处于速度控制或位置控制状态。准停角度可由外部开关量信 号(12位)设定,这一点与磁传感器准停不同。磁传感器准停的角度无法随意设定,要调 整准停位置,只有调整磁发体与磁传感器的相对位置。编码器准停控制的时序如图4-6 所示,其步骤与传感器类似。 表4-2 YASKAWA编码器准停规格 位置检测方式 使用编码器A,B,C信号 准停位置 基本准停位置为编码器零位C脉冲到达处,准停位置偏移可在主轴驱动 内部或外部指定 重复准停精度 小于±0.2° 误差修正力矩 额定力矩士0.1”误差 选件板 JPAC-C346 编码器型号 PC-1024ZLH 4)数控系统准停控制。这种准停控制方式的准停功能是由数控系统完成的,数控 系统控制主轴准停的原理与进给位置控制的原理非常相似,如图4-7所示。数控系统准 停的步骤如下:数控系统执行M19或M19S*时,首先将M19送至可编程控制器。 可编程控制器经译码送出控制信号,使主轴驱动进入伺服状态,同时数控系统控制主轴 电动机降速,寻找零位脉冲C,然后进入位置闭环控制状态。如执行M19而无S指令 则主轴定位于相对零位脉冲C的某一缺省位置(何由数控系统设定)。如执行M19S“ 则主轴定位于指令位置,也就是相对零位脉冲S*的角度位置。举例如下: M03S1000 主轴以1000rmin正转 M19 主轴准停与缺省位置 M19S100 主轴准停转至100°处 S1000 主轴再次以1000rmin正转 M19S200 主轴准停至200°处 兰州交通大学机电工程学院 数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 5 发出 ORT 信号即可。主轴驱动完成准听后输出准停完成信号 ORE。编码器型准停的基 本规格如表 4-2 所列。图 4-5 为编码器主轴准停控制的结构图。这种准停方式可采用主 轴电动机内部安装的编码器信号(来自于主轴驱动装置),也可以在主轴上直接安装其他 编码器。采用前一种方式的要注意传动链对主轴准停精度的影响。主轴驱动装置内部可 自动转换状态,使主轴驱动处于速度控制或位置控制状态。准停角度可由外部开关量信 号(12 位)设定,这一点与磁传感器准停不同。磁传感器准停的角度无法随意设定,要调 整准停位置,只有调整磁发体与磁传感器的相对位置。编码器准停控制的时序如图 4-6 所示,其步骤与传感器类似。 表 4-2 YASKAWA 编码器准停规格 4) 数控系统准停控制。这种准停控制方式的准停功能是由数控系统完成的,数控 系统控制主轴准停的原理与进给位置控制的原理非常相似,如图 4-7 所示。数控系统准 停的步骤如下:数控系统执行 M19 或 M19 S****时,首先将 M19 送至可编程控制器。 可编程控制器经译码送出控制信号,使主轴驱动进入伺服状态,同时数控系统控制主轴 电动机降速,寻找零位脉冲 C,然后进入位置闭环控制状态。如执行 M19 而无 S 指令, 则主轴定位于相对零位脉冲 C 的某一缺省位置(可由数控系统设定)。如执行 M19 S****, 则主轴定位于指令位置,也就是相对零位脉冲 S****的角度位置。举例如下: M03 S1000 主轴以 1000r/min 正转 M19 主轴准停与缺省位置 M19 S100 主轴准停转至 100°处 S1000 主轴再次以 1000r/min 正转 M19 S200 主轴准停至 200°处 位置检测方式 使用编码器 A,B,C 信号 准停位置 基本准停位置为编码器零位 C 脉冲到达处,准停位置偏移可在主轴驱动 内部或外部指定 重复准停精度 小于±0.2° 误差修正力矩 额定力矩/±0.1°误差 选件板 JPAC-C346 编码器型号 PC-1024ZLH