正在加载图片...
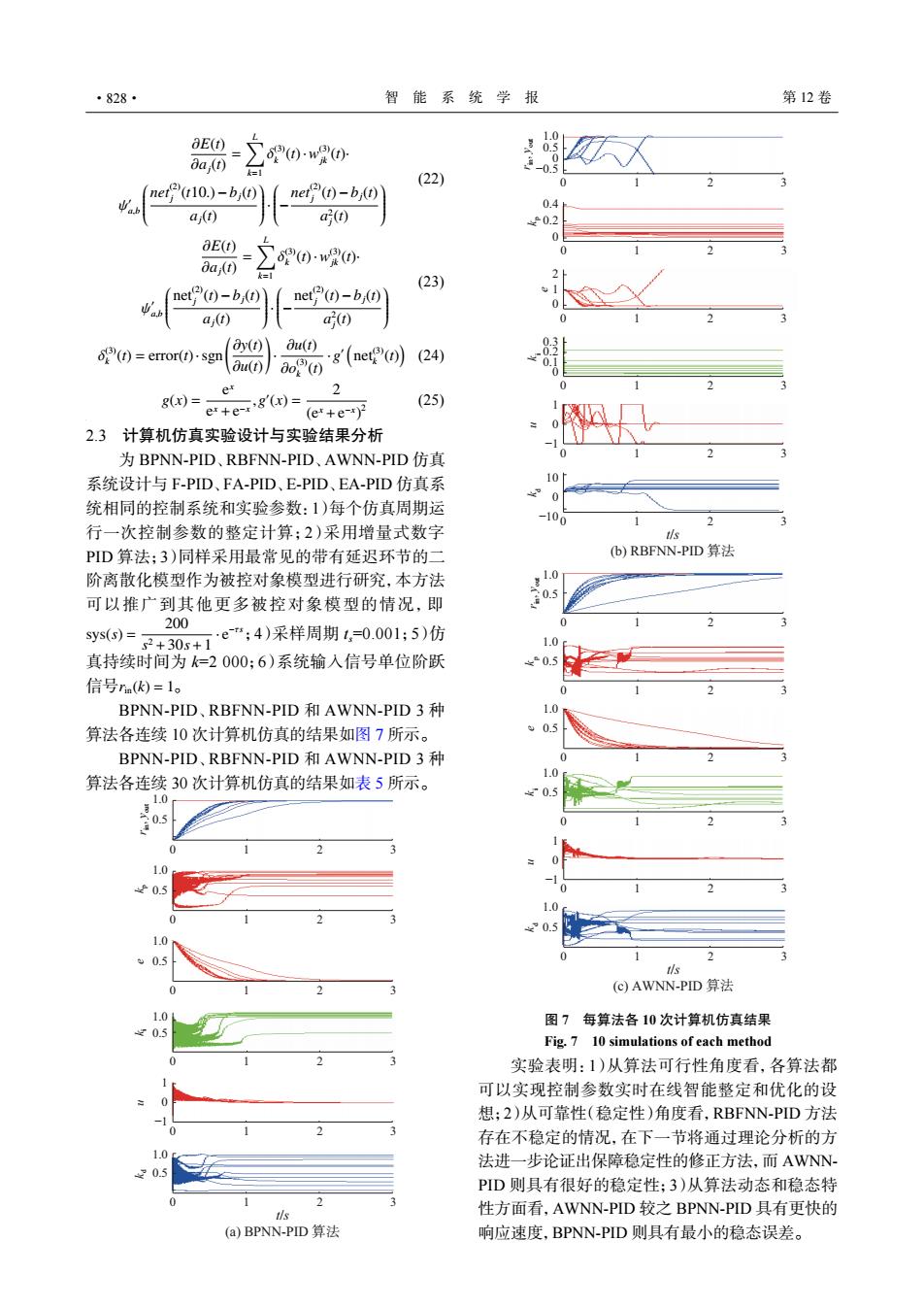
·828· 智能系统学报 第12卷 aE()= aa,() ∑00-w0 -0.5 (22) net210.)-b,0 net2(0-b,0 0 a 0.4 aj(t) a(t) 0.2 g0-g 0 aE(t) 0 Ba;(t) 行 net20-b,0) (23) net2(0-b,(0 a;(t) a(t) (t)=error(t).sgn ay(r)au(t) (24) au(t) ao(t) g(net'o g(x)= erte-8(r)=- e*+e-)2 (25) 2.3计算机仿真实验设计与实验结果分析 为BPNN-PID、RBFNN-PID、AWNN-PID仿真 系统设计与F-PID、FA-PID、E-PID、EA-PID仿真系 10 统相同的控制系统和实验参数:1)每个仿真周期运 -100 1 2 行一次控制参数的整定计算;2)采用增量式数字 春 PD算法:3)同样采用最常见的带有延迟环节的二 (b)RBFNN-PID算法 阶离散化模型作为被控对象模型进行研究,本方法 1.0 可以推广到其他更多被控对象模型的情况,即 05 200 sy=+303+e;4)采样周期1,0.01:5)仿 1.0 真持续时间为k=2000;6)系统输入信号单位阶跃 05 信号nm(=1。 BPNN-PID、RBFNN-PID和AWNN-PID3种 算法各连续10次计算机仿真的结果如图7所示。 0.5 BPNN-PID、RBFNN-PID和AWNN-PID3种 算法各连续30次计算机仿真的结果如表5所示。 09 1.0 0.5 1.0 0.5 1.0 0.5 2 s (C)AWNN-PID算法 图7每算法各10次计算机仿真结果 Fig.7 10 simulations of each method 实验表明:1)从算法可行性角度看,各算法都 可以实现控制参数实时在线智能整定和优化的设 想;2)从可靠性(稳定性)角度看,RBFNN-PID方法 存在不稳定的情况,在下一节将通过理论分析的方 法进一步论证出保障稳定性的修正方法,而AWNN PID则具有很好的稳定性:3)从算法动态和稳态特 2 性方面看,AWNN-PID较之BPNN-PID具有更快的 (a)BPNN-PID算法 响应速度,BPNN-PID则具有最小的稳态误差。∂E(t) ∂aj(t) = ∑L k=1 δ (3) k (t)·w (3) jk (t)· ψ ′ a,b net(2) j (t10.)−bj(t) aj(t) · − net(2) j (t)−bj(t) a 2 j (t) (22) ∂E(t) ∂aj(t) = ∑L k=1 δ (3) k (t)·w (3) jk (t)· ψ ′ a,b net(2) j (t)−bj(t) aj(t) · − net(2) j (t)−bj(t) a 2 j (t) (23) δ (3) k (t) = error(t)·sgn( ∂y(t) ∂u(t) ) · ∂u(t) ∂o (3) k (t) · g ′ ( net(3) k (t) ) (24) g(x) = e x e x +e −x ,g ′ (x) = 2 (ex +e −x ) 2 (25) 2.3 计算机仿真实验设计与实验结果分析 sys(s) = 200 s 2 +30s+1 · e −τs rin(k) = 1 为 BPNN-PID、RBFNN-PID、AWNN-PID 仿真 系统设计与 F-PID、FA-PID、E-PID、EA-PID 仿真系 统相同的控制系统和实验参数:1)每个仿真周期运 行一次控制参数的整定计算;2)采用增量式数字 PID 算法;3)同样采用最常见的带有延迟环节的二 阶离散化模型作为被控对象模型进行研究,本方法 可以推广到其他更多被控对象模型的情况,即 ;4)采样周期 ts=0.001;5)仿 真持续时间为 k=2 000;6)系统输入信号单位阶跃 信号 。 BPNN-PID、RBFNN-PID 和 AWNN-PID 3 种 算法各连续 10 次计算机仿真的结果如图 7 所示。 BPNN-PID、RBFNN-PID 和 AWNN-PID 3 种 算法各连续 30 次计算机仿真的结果如表 5 所示。 实验表明:1)从算法可行性角度看,各算法都 可以实现控制参数实时在线智能整定和优化的设 想;2)从可靠性(稳定性)角度看,RBFNN-PID 方法 存在不稳定的情况,在下一节将通过理论分析的方 法进一步论证出保障稳定性的修正方法,而 AWNNPID 则具有很好的稳定性;3)从算法动态和稳态特 性方面看,AWNN-PID 较之 BPNN-PID 具有更快的 响应速度,BPNN-PID 则具有最小的稳态误差。 0 1 2 3 0 1 2 3 0 1 2 3 0 1 2 3 1.0 0.5 1.0 0.5 1.0 0.5 1.0 0.5 0 1 2 3 1 0 −1 0 1 2 3 1.0 0.5 rin, yout kp kd e ki u t/s (a) BPNN-PID ッ∁ 0 1 2 3 0 1 2 3 0 1 2 3 0 1 2 3 0 1 2 3 1 0 −1 0 1 2 3 1.0 0.5 1.0 0.5 1.0 0.5 1.0 0.5 1.0 0.5 rin, yout kp kd e ki u 0 1 2 3 0.3 0.2 0.1 0 0 1 2 3 1 0 −1 0 1 2 3 10 0 −10 k d k i u t/s (b) RBFNN-PID ッ∁ 0 1 2 3 2 1 0 0 1 2 3 0.4 0.2 0 0 1 2 3 1.0 0.5 0 −0.5 rin, yout kp e t/s (c) AWNN-PID 算法 图 7 每算法各 10 次计算机仿真结果 Fig. 7 10 simulations of each method ·828· 智 能 系 统 学 报 第 12 卷