正在加载图片...
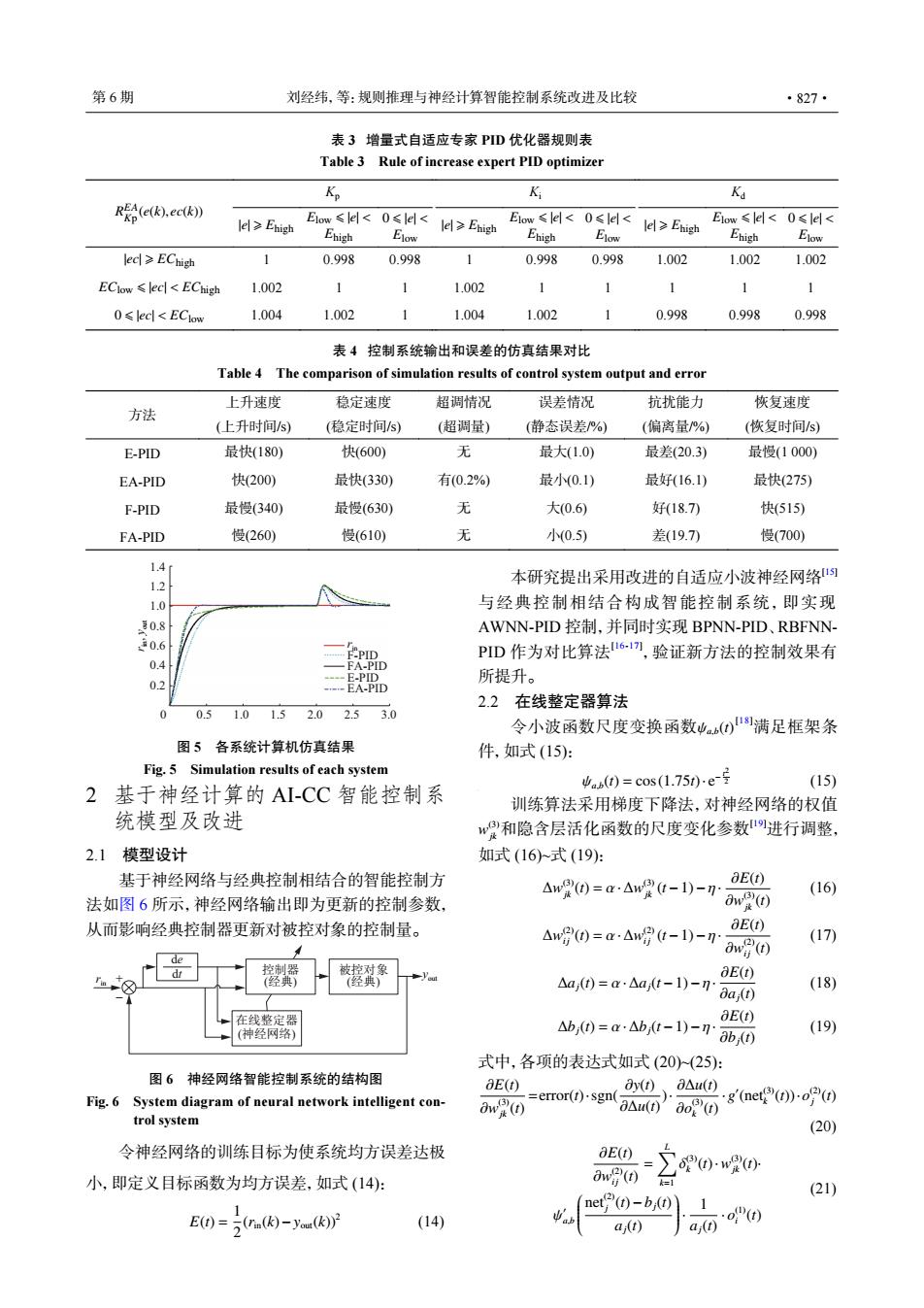
第6期 刘经纬,等:规则推理与神经计算智能控制系统改进及比较 ·827· 表3增量式自适应专家PD优化器规则表 Table 3 Rule of increase expert PID optimizer K K Ka (e(k).ec(k)) lel≥Ehigh Eow≤lel<0≤le< lel≥Ehigh Eow≤lel<0≤le< Eow≤lel<0≤le< Ehigh Elow Ehigh Elow lel≥Ehigh Ehigh Elow ledl≥EChigh 1 0.998 0.998 1 0.998 0.998 1.002 1.002 1.002 EClow≤lecl<EChigh 1.002 1 1 1.002 1 1 1 1 1 0≤ecl<EClow 1.004 1.002 1 1.004 1.002 1 0.998 0.998 0.998 表4控制系统输出和误差的仿真结果对比 Table 4 The comparison of simulation results of control system output and error 上升速度 稳定速度 超调情况 抗扰能力 恢复速度 方法 误差情况 (上升时间s) (稳定时间/s) (超调量) (静态误差/%) (偏离量%) (恢复时间s) E-PID 最快(180) 快(600) 无 最大(1.0) 最差(20.3) 最慢(1000) EA-PID 快200) 最快(330) 有(0.2%) 最小0.1) 最好(16.1) 最快(275) F-PID 最慢(340) 最慢(630) 无 大(0.6) 好18.7) 快(515) FA-PID 慢(260) 慢(610) 无 小0.5) 差(19.7) 慢(700) 1.4 1.2 本研究提出采用改进的自适应小波神经网络阿 1.0 与经典控制相结合构成智能控制系统,即实现 30.8 AWNN-PID控制,并同时实现BPNN-PID、RBFNN- 0.6 FPID PID作为对比算法6-1刃,验证新方法的控制效果有 0.4 -FA-PID ---E-PID 0.2 所提升。 ---EA-PID 2.2在线整定器算法 0 0.5 1.01.52.02.53.0 令小波函数尺度变换函数山()18割满足框架条 图5各系统计算机仿真结果 件,如式(15): Fig.5 Simulation results of each system 2基于神经计算的AI-CC智能控制系 4ab(0)=cos(1.751)e号 (15) 训练算法采用梯度下降法,对神经网络的权值 统模型及改进 w和隐含层活化函数的尺度变化参数进行调整, 2.1模型设计 如式(16式(19): 基于神经网络与经典控制相结合的智能控制方 △w0=△wt-1)- aE(t) (16) 法如图6所示,神经网络输出即为更新的控制参数, aw (t) 从而影响经典控制器更新对被控对象的控制量。 △w(0=a:△w号t-1)-刀 aE(t) aw() (17) dr aE(t) Aa,()=a.Aa(-1)-naa (18) 在线整定器 aE(t) (神经网络) △b0=a-△b,-1)-刀b,0 (19) 式中,各项的表达式如式(20(25): 图6神经网络智能控制系统的结构图 bE(t) ay(t)、a△u(t) Fig.6 System diagram of neural network intelligent con- =error(t).sgn( aw(t) △(0ao'd g'(net ())o (t) trol system (20) 令神经网络的训练目标为使系统均方误差达极 8E() 小,即定义目标函数为均方误差,如式(14): w号0 =)-w0 (21) 1 net (r)-b(t) 1 E(t)= ((k)-you(k))2 (14) ..o(t) a;(t) a;(t2 基于神经计算的 AI-CC 智能控制系 统模型及改进 2.1 模型设计 基于神经网络与经典控制相结合的智能控制方 法如图 6 所示,神经网络输出即为更新的控制参数, 从而影响经典控制器更新对被控对象的控制量。 令神经网络的训练目标为使系统均方误差达极 小,即定义目标函数为均方误差,如式 (14): E(t) = 1 2 (rin(k)−yout(k))2 (14) 本研究提出采用改进的自适应小波神经网络[15] 与经典控制相结合构成智能控制系统,即实现 AWNN-PID 控制,并同时实现 BPNN-PID、RBFNNPID 作为对比算法[16-17] ,验证新方法的控制效果有 所提升。 2.2 在线整定器算法 令小波函数尺度变换函数 ψa,b(t) [18]满足框架条 件,如式 (15): ψa,b(t) = cos (1.75t)· e − t 2 2 (15) w (3) jk 训练算法采用梯度下降法,对神经网络的权值 和隐含层活化函数的尺度变化参数[19]进行调整, 如式 (16)~式 (19): ∆w (3) jk (t) = α·∆w (3) jk (t−1)−η · ∂E(t) ∂w (3) jk (t) (16) ∆w (2) i j (t) = α·∆w (2) i j (t−1)−η · ∂E(t) ∂w (2) i j (t) (17) ∆aj(t) = α·∆aj(t−1)−η · ∂E(t) ∂aj(t) (18) ∆bj(t) = α·∆bj(t−1)−η · ∂E(t) ∂bj(t) (19) 式中,各项的表达式如式 (20)~(25): ∂E(t) ∂w (3) jk (t) =error(t)·sgn( ∂y(t) ∂∆u(t) )· ∂∆u(t) ∂o (3) k (t) ·g ′ (net(3) k (t))·o (2) j (t) (20) ∂E(t) ∂w (2) i j (t) = ∑L k=1 δ (3) k (t)·w (3) jk (t)· ψ ′ a,b net(2) j (t)−bj(t) aj(t) · 1 aj(t) · o (1) i (t) (21) 表 3 增量式自适应专家 PID 优化器规则表 Table 3 Rule of increase expert PID optimizer R EA Kp (e(k), ec(k)) Kp Ki Kd |e| ⩾ Ehigh Elow ⩽ |e| < Ehigh 0 ⩽ |e| < Elow |e| ⩾ Ehigh Elow ⩽ |e| < Ehigh 0 ⩽ |e| < Elow |e| ⩾ Ehigh Elow ⩽ |e| < Ehigh 0 ⩽ |e| < Elow |ec| ⩾ EChigh 1 0.998 0.998 1 0.998 0.998 1.002 1.002 1.002 EClow ⩽ |ec| < EChigh 1.002 1 1 1.002 1 1 1 1 1 0 ⩽ |ec| < EClow 1.004 1.002 1 1.004 1.002 1 0.998 0.998 0.998 表 4 控制系统输出和误差的仿真结果对比 Table 4 The comparison of simulation results of control system output and error 方法 上升速度 (上升时间/s) 稳定速度 (稳定时间/s) 超调情况 (超调量) 误差情况 (静态误差/%) 抗扰能力 (偏离量/%) 恢复速度 (恢复时间/s) E-PID 最快(180) 快(600) 无 最大(1.0) 最差(20.3) 最慢(1 000) EA-PID 快(200) 最快(330) 有(0.2%) 最小(0.1) 最好(16.1) 最快(275) F-PID 最慢(340) 最慢(630) 无 大(0.6) 好(18.7) 快(515) FA-PID 慢(260) 慢(610) 无 小(0.5) 差(19.7) 慢(700) 1.4 1.2 1.0 0.8 0.6 0.4 0.2 rin, yout 0 0.5 1.0 1.5 2.0 2.5 3.0 rin F-PID FA-PID E-PID EA-PID 图 5 各系统计算机仿真结果 Fig. 5 Simulation results of each system rin yout de dt + − ᧗ࡦಘ (㓿ި) 㻛᧗ሩ䊑 (㓿ި) ൘㓯ᮤᇊಘ (⾎㓿㖁㔌) 图 6 神经网络智能控制系统的结构图 Fig. 6 System diagram of neural network intelligent control system 第 6 期 刘经纬,等:规则推理与神经计算智能控制系统改进及比较 ·827·