正在加载图片...
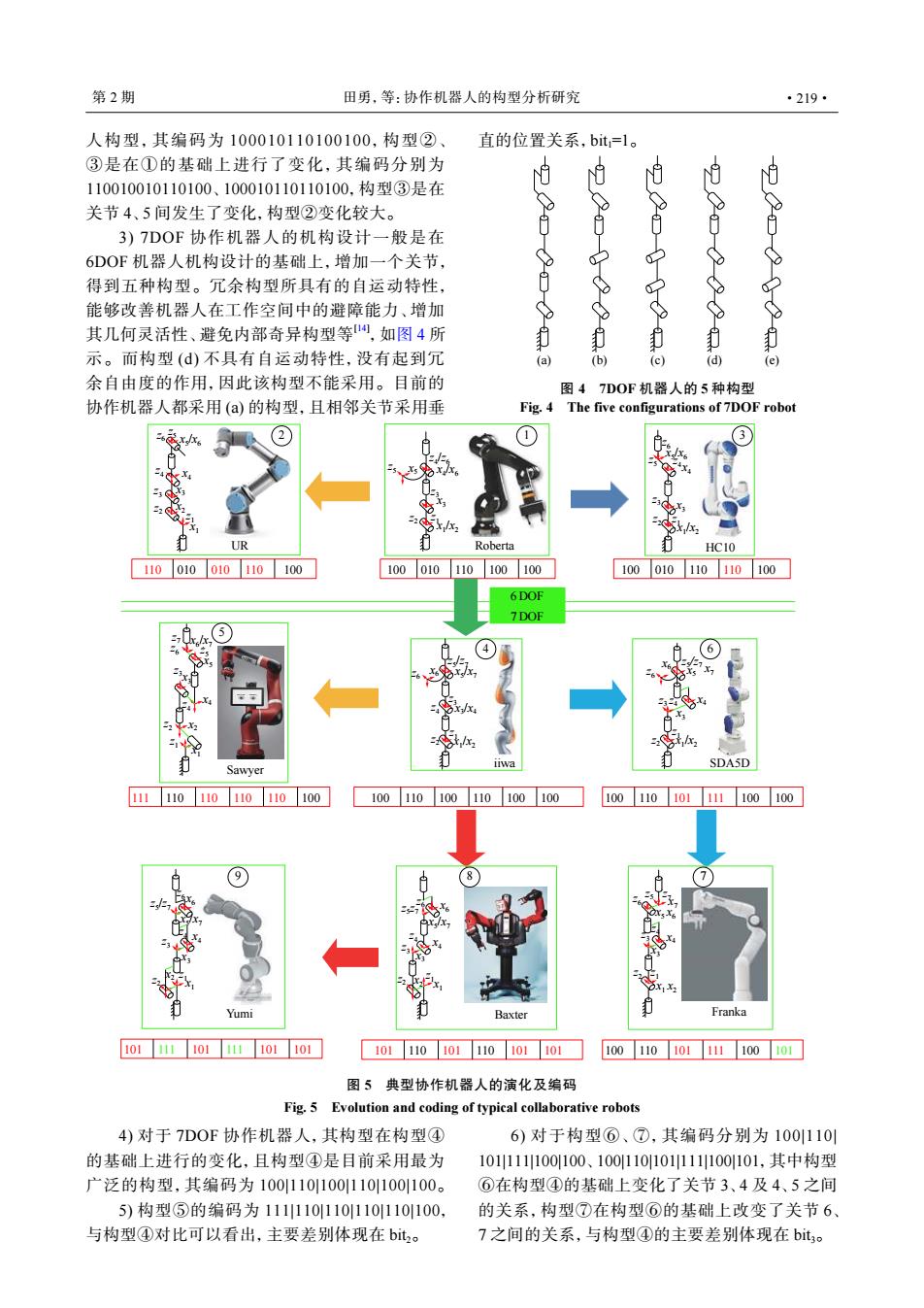
第2期 田勇,等:协作机器人的构型分析研究 ·219· 人构型,其编码为100010110100100,构型②、 直的位置关系,bit=l。 ③是在①的基础上进行了变化,其编码分别为 110010010110100、100010110110100,构型③是在 关节4、5间发生了变化,构型②变化较大。 ǜ AO 3)7DOF协作机器人的机构设计一般是在 6DOF机器人机构设计的基础上,增加一个关节, 得到五种构型。冗余构型所具有的自运动特性, 能够改善机器人在工作空间中的避障能力、增加 LA 其几何灵活性、避免内部奇异构型等,如图4所 示。而构型()不具有自运动特性,没有起到冗 (b) (e (d) e 余自由度的作用,因此该构型不能采用。目前的 图47D0F机器人的5种构型 协作机器人都采用(a)的构型,且相邻关节采用垂 Fig.4 The five configurations of 7DOF robot x/x UR Roberta HC10 110010010110100 100010110100100 100010110110100 6DOF 7DOF 3-4 0 iiwa SDA5D Sawyer 111110110110110100 100110100110100100 100110101111100100 (9 ǜ 8 Yumi Baxter Franka 101110111101101 101110101110101101 10011010111100o1 图5典型协作机器人的演化及编码 Fig.5 Evolution and coding of typical collaborative robots 4)对于7DOF协作机器人,其构型在构型④ 6)对于构型⑥、⑦,其编码分别为1001101 的基础上进行的变化,且构型④是目前采用最为 101川111100100、1001101101川111100101,其中构型 广泛的构型,其编码为100111011001101100100。 ⑥在构型④的基础上变化了关节3、4及4、5之间 5)构型⑤的编码为111川1101101101110100, 的关系,构型⑦在构型⑥的基础上改变了关节6、 与构型④对比可以看出,主要差别体现在bit2。 7之间的关系,与构型④的主要差别体现在bit。人构型,其编码为 100010110100100,构型②、 ③是在①的基础上进行了变化,其编码分别为 110010010110100、100010110110100,构型③是在 关节 4、5 间发生了变化,构型②变化较大。 3) 7DOF 协作机器人的机构设计一般是在 6DOF 机器人机构设计的基础上,增加一个关节, 得到五种构型。冗余构型所具有的自运动特性, 能够改善机器人在工作空间中的避障能力、增加 其几何灵活性、避免内部奇异构型等[14] ,如图 4 所 示。而构型 (d) 不具有自运动特性,没有起到冗 余自由度的作用,因此该构型不能采用。目前的 协作机器人都采用 (a) 的构型,且相邻关节采用垂 直的位置关系,bit1=1。 (a) (b) (c) (d) (e) 图 4 7DOF 机器人的 5 种构型 Fig. 4 The five configurations of 7DOF robot UR x5 /x6 x1 z1 z2 x2 z z 5 6 z4 x4 z3 x3 Roberta z5 x5 x4 /x6 x1 /x2 z z2 1 z4 /z6 z3 x3 HC10 x5 /x6 x1 /x2 z z2 1 z5 z4 x4 z3 x3 z6 iiwa z6 x6 x5 /x7 x1 /x2 z1 z z 2 1 z5 /z7 z4 z3 x3 /x4 110 010 010 110 100 100 010 110 100 100 100 010 110 110 100 111 110 110 110 110 100 100 110 100 110 100 100 100 110 101 111 100 100 101 111 101 111 101 101 101 110 101 110 101 101 100 110 101 111 100 101 6 DOF 7 DOF 2 1 3 4 Sawyer x1 x3 z4 z5 x5 z3 z2 x2 x4 z7 x6 /x7 5 z6 SDA5D z2 x5 x1 /x2 z1 z5 /z7 x7 z4 z3 x4 x3 z6 x6 6 Franka x5 x1 z1 x2 z2 z5 z6 x6 z4 x4 z3 x3 z7 x7 7 Baxter x5 /x7 x1 z z 1 2 x2 z5 z7 z6 x6 z4 z x4 3 x3 8 Yumi x5 /x7 x1 z1 x2 z2 z5 /z7 z6 x6 z z 4 x4 3 x3 9 图 5 典型协作机器人的演化及编码 Fig. 5 Evolution and coding of typical collaborative robots 4) 对于 7DOF 协作机器人,其构型在构型④ 的基础上进行的变化,且构型④是目前采用最为 广泛的构型,其编码为 100|110|100|110|100|100。 5) 构型⑤的编码为 111|110|110|110|110|100, 与构型④对比可以看出,主要差别体现在 bit2。 6) 对于构型⑥、⑦,其编码分别为 100|110| 101|111|100|100、100|110|101|111|100|101,其中构型 ⑥在构型④的基础上变化了关节 3、4 及 4、5 之间 的关系,构型⑦在构型⑥的基础上改变了关节 6、 7 之间的关系,与构型④的主要差别体现在 bit3。 第 2 期 田勇,等:协作机器人的构型分析研究 ·219·