正在加载图片...
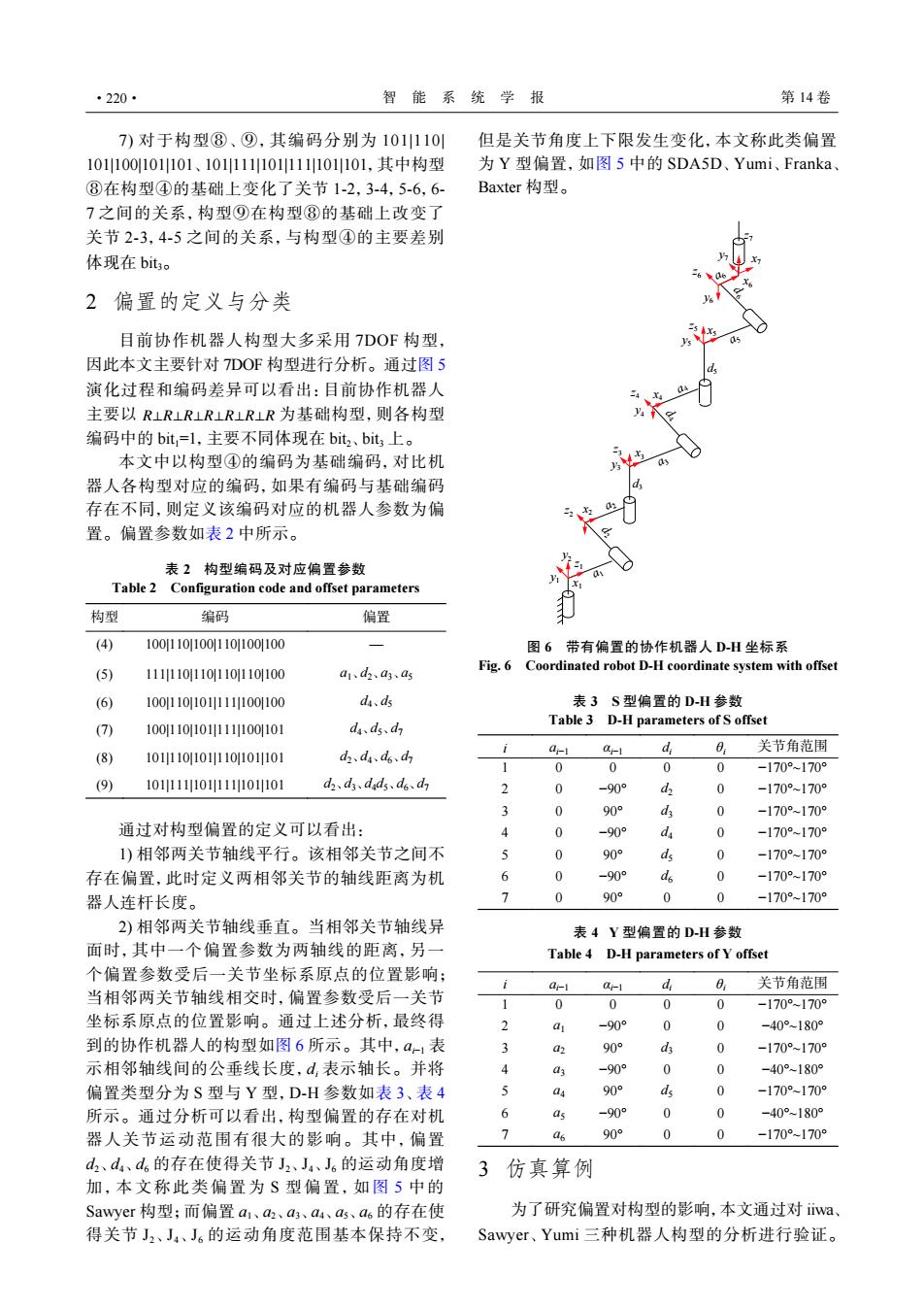
·220· 智能系统学报 第14卷 7)对于构型⑧、⑨,其编码分别为101110川 但是关节角度上下限发生变化,本文称此类偏置 101川100101川101、10111110111川101川101,其中构型 为Y型偏置,如图5中的SDA5D、Yumi、Franka、 ⑧在构型④的基础上变化了关节1-2,3-4,5-6,6 Baxter构型。 7之间的关系,构型⑨在构型⑧的基础上改变了 关节2-3,4-5之间的关系,与构型④的主要差别 体现在bit。 2偏置的定义与分类 目前协作机器人构型大多采用7DOF构型, 因此本文主要针对7DOF构型进行分析。通过图5 演化过程和编码差异可以看出:目前协作机器人 主要以R⊥R⊥R⊥R⊥R⊥R⊥R为基础构型,则各构型 编码中的bit,=l,主要不同体现在bit2、bit上。 本文中以构型④的编码为基础编码,对比机 器人各构型对应的编码,如果有编码与基础编码 存在不同,则定义该编码对应的机器人参数为偏 置。偏置参数如表2中所示。 表2构型编码及对应偏置参数 Table 2 Configuration code and offset parameters 构型 编码 偏置 (4) 1001110100110100100 图6带有偏置的协作机器人D-H坐标系 a1、d2、a3、as Fig.6 Coordinated robot D-H coordinate system with offset (5) 111110110110110100 (6) 100110101川111100100 d4、ds 表3S型偏置的D-H参数 Table 3 D-H parameters of S offset (7) 100110101111100101 da、ds、d山 (8) 101110101110101101 d、d4、d6、d a-1 d 0 关节角范围 0 0 0 0 -170°-170° (9) 101111川101川111101川101 d、d3、dads、d6、d 2 0 -90° 0 -170°~170° 3 0 90° 0 -170°~170° 通过对构型偏置的定义可以看出: 4 0 -90° d 0 -170°~170° 1)相邻两关节轴线平行。该相邻关节之间不 0 90° 0 -170°~170° 存在偏置,此时定义两相邻关节的轴线距离为机 6 0 -90° ds 0 -170°~170° 器人连杆长度。 0 90° 0 0 -170°~170° 2)相邻两关节轴线垂直。当相邻关节轴线异 表4Y型偏置的D-H参数 面时,其中一个偏置参数为两轴线的距离,另一 Table 4 D-H parameters of Y offset 个偏置参数受后一关节坐标系原点的位置影响; ar1 ai-1 d 关节角范围 当相邻两关节轴线相交时,偏置参数受后一关节 0 0 0 0 -170°-170° 坐标系原点的位置影响。通过上述分析,最终得 a -90° 0 0 -40°180° 到的协作机器人的构型如图6所示。其中,a1表 a 90° d 0 -170°-170° 示相邻轴线间的公垂线长度,d,表示轴长。并将 a3 -90° 0 0 -40°180° 偏置类型分为S型与Y型,D-H参数如表3、表4 90° 子 0 -170°170° 所示。通过分析可以看出,构型偏置的存在对机 6 as -90 0 0 -40°180° 器人关节运动范围有很大的影响。其中,偏置 as 90° 0 -170°-170° d2、d、d。的存在使得关节J2、J4、J6的运动角度增 3 仿真算例 加,本文称此类偏置为S型偏置,如图5中的 Sawyer构型;而偏置a1、a、a、a4、as、a6的存在使 为了研究偏置对构型的影响,本文通过对iwa、 得关节J2、J4、J。的运动角度范围基本保持不变, Sawyer、Yumi三种机器人构型的分析进行验证。7) 对于构型⑧、⑨,其编码分别为 101|110| 101|100|101|101、101|111|101|111|101|101,其中构型 ⑧在构型④的基础上变化了关节 1-2,3-4,5-6,6- 7 之间的关系,构型⑨在构型⑧的基础上改变了 关节 2-3,4-5 之间的关系,与构型④的主要差别 体现在 bit3。 2 偏置的定义与分类 R⊥R⊥R⊥R⊥R⊥R⊥R 目前协作机器人构型大多采用 7DOF 构型, 因此本文主要针对 7DOF 构型进行分析。通过图 5 演化过程和编码差异可以看出:目前协作机器人 主要以 为基础构型,则各构型 编码中的 bit1=1,主要不同体现在 bit2、bit3 上。 本文中以构型④的编码为基础编码,对比机 器人各构型对应的编码,如果有编码与基础编码 存在不同,则定义该编码对应的机器人参数为偏 置。偏置参数如表 2 中所示。 表 2 构型编码及对应偏置参数 Table 2 Configuration code and offset parameters 构型 编码 偏置 (4) 100|110|100|110|100|100 — (5) 111|110|110|110|110|100 a1、d2、a3、a5 (6) 100|110|101|111|100|100 d4、d5 (7) 100|110|101|111|100|101 d4、d5、d7 (8) 101|110|101|110|101|101 d2、d4、d6、d7 (9) 101|111|101|111|101|101 d2、d3、d4d5、d6、d7 通过对构型偏置的定义可以看出: 1) 相邻两关节轴线平行。该相邻关节之间不 存在偏置,此时定义两相邻关节的轴线距离为机 器人连杆长度。 2) 相邻两关节轴线垂直。当相邻关节轴线异 面时,其中一个偏置参数为两轴线的距离,另一 个偏置参数受后一关节坐标系原点的位置影响; 当相邻两关节轴线相交时,偏置参数受后一关节 坐标系原点的位置影响。通过上述分析,最终得 到的协作机器人的构型如图 6 所示。其中,ai−1 表 示相邻轴线间的公垂线长度,di 表示轴长。并将 偏置类型分为 S 型与 Y 型,D-H 参数如表 3、表 4 所示。通过分析可以看出,构型偏置的存在对机 器人关节运动范围有很大的影响。其中,偏置 d2、d4、d6 的存在使得关节 J2、J4、J6 的运动角度增 加,本文称此类偏置为 S 型偏置,如图 5 中的 Sawyer 构型;而偏置 a1、a2、a3、a4、a5、a6 的存在使 得关节 J2、J4、J6 的运动角度范围基本保持不变, 但是关节角度上下限发生变化,本文称此类偏置 为 Y 型偏置,如图 5 中的 SDA5D、Yumi、Franka、 Baxter 构型。 x1 z1 z2 x2 y2 z3 x3 y3 z4 x4 y4 z6 x6 y6 a1 d2 d3 a2 a3 a4 d4 d5 z5 x5 y5 a5 d6 y1 y7 x7 z7 a6 图 6 带有偏置的协作机器人 D-H 坐标系 Fig. 6 Coordinated robot D-H coordinate system with offset 表 3 S 型偏置的 D-H 参数 Table 3 D-H parameters of S offset i ai−1 αi−1 di θi 关节角范围 1 0 0 0 0 −170°~170° 2 0 −90° d2 0 −170°~170° 3 0 90° d3 0 −170°~170° 4 0 −90° d4 0 −170°~170° 5 0 90° d5 0 −170°~170° 6 0 −90° d6 0 −170°~170° 7 0 90° 0 0 −170°~170° 3 仿真算例 为了研究偏置对构型的影响,本文通过对 iiwa、 Sawyer、Yumi 三种机器人构型的分析进行验证。 表 4 Y 型偏置的 D-H 参数 Table 4 D-H parameters of Y offset i ai−1 αi−1 di θi 关节角范围 1 0 0 0 0 −170°~170° 2 a1 −90° 0 0 −40°~180° 3 a2 90° d3 0 −170°~170° 4 a3 −90° 0 0 −40°~180° 5 a4 90° d5 0 −170°~170° 6 a5 −90° 0 0 −40°~180° 7 a6 90° 0 0 −170°~170° ·220· 智 能 系 统 学 报 第 14 卷