正在加载图片...
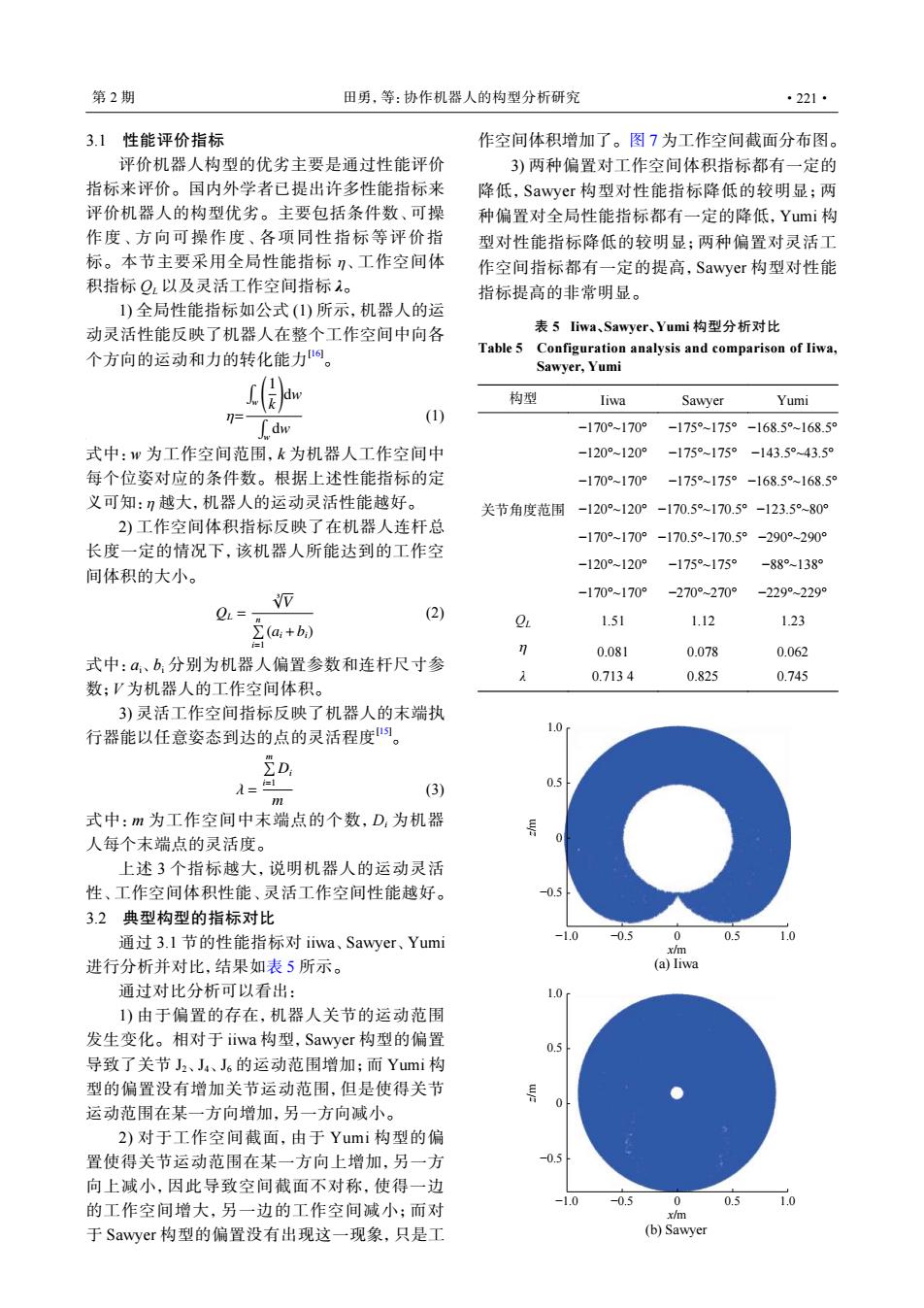
第2期 田勇,等:协作机器人的构型分析研究 ·221· 3.1性能评价指标 作空间体积增加了。图7为工作空间截面分布图。 评价机器人构型的优劣主要是通过性能评价 3)两种偏置对工作空间体积指标都有一定的 指标来评价。国内外学者已提出许多性能指标来 降低,Sawyer构型对性能指标降低的较明显;两 评价机器人的构型优劣。主要包括条件数、可操 种偏置对全局性能指标都有一定的降低,Yumi构 作度、方向可操作度、各项同性指标等评价指 型对性能指标降低的较明显:两种偏置对灵活工 标。本节主要采用全局性能指标、工作空间体 作空间指标都有一定的提高,Sawyer构型对性能 积指标Q以及灵活工作空间指标1。 指标提高的非常明显。 1)全局性能指标如公式(1)所示,机器人的运 动灵活性能反映了机器人在整个工作空间中向各 表5Iiwa、Sawyer、Yumi构型分析对比 个方向的运动和力的转化能力。 Table 5 Configuration analysis and comparison of liwa, Sawyer,Yumi 构型 liwa Sawyer Yumi (1) -170°170° -175°175°-168.5°-168.5° 式中:w为工作空间范围,k为机器人工作空间中 -120°~120° -175°175°-143.5°43.59 每个位姿对应的条件数。根据上述性能指标的定 -170°、170° -175°-175°-168.5°-168.59 义可知:?越大,机器人的运动灵活性能越好。 关节角度范围-120°~120°-170.5°170.5°-123.5°~80° 2)工作空间体积指标反映了在机器人连杆总 -170°170°-170.5°170.5°-290°-290° 长度一定的情况下,该机器人所能达到的工作空 -120°-120° -175°175° -88°-138 间体积的大小。 派 -170°-170° -270°-270° -229°-229° Q1= (2) QL 1.51 1.12 1.23 ∑(a+b) 0.081 0.078 0.062 式中:a、b:分别为机器人偏置参数和连杆尺寸参 0.7134 0.825 0.745 数;V为机器人的工作空间体积。 3)灵活工作空间指标反映了机器人的末端执 行器能以任意姿态到达的点的灵活程度。 1.0 受D: (3) 0.5 01 式中:m为工作空间中末端点的个数,D,为机器 人每个末端点的灵活度。 上述3个指标越大,说明机器人的运动灵活 性、工作空间体积性能、灵活工作空间性能越好。 -0.5 3.2典型构型的指标对比 通过3.1节的性能指标对iiwa、Sawyer、Yumi -1.0 0.5 0 0.5 1.0 X/m 进行分析并对比,结果如表5所示。 (a)liwa 通过对比分析可以看出: 1.0 1)由于偏置的存在,机器人关节的运动范围 发生变化。相对于iiwa构型,Sawyer构型的偏置 0.5 导致了关节J2、J4、J6的运动范围增加;而Yumi构 型的偏置没有增加关节运动范围,但是使得关节 0 运动范围在某一方向增加,另一方向减小。 2)对于工作空间截面,由于Yumi构型的偏 置使得关节运动范围在某一方向上增加,另一方 -0.5 向上减小,因此导致空间截面不对称,使得一边 -0.5 0 1.0 的工作空间增大,另一边的工作空间减小;而对 -1.0 0.5 x/m 于Sawyer构型的偏置没有出现这一现象,只是工 (b)Sawyer3.1 性能评价指标 η 评价机器人构型的优劣主要是通过性能评价 指标来评价。国内外学者已提出许多性能指标来 评价机器人的构型优劣。主要包括条件数、可操 作度、方向可操作度、各项同性指标等评价指 标。本节主要采用全局性能指标 、工作空间体 积指标 QL 以及灵活工作空间指标 λ。 1) 全局性能指标如公式 (1) 所示,机器人的运 动灵活性能反映了机器人在整个工作空间中向各 个方向的运动和力的转化能力[16]。 η= ∫ w ( 1 k ) dw ∫ w dw (1) η 式中:w 为工作空间范围,k 为机器人工作空间中 每个位姿对应的条件数。根据上述性能指标的定 义可知: 越大,机器人的运动灵活性能越好。 2) 工作空间体积指标反映了在机器人连杆总 长度一定的情况下,该机器人所能达到的工作空 间体积的大小。 QL = √3 V ∑n i=1 (ai +bi) (2) 式中:ai、bi 分别为机器人偏置参数和连杆尺寸参 数;V 为机器人的工作空间体积。 3) 灵活工作空间指标反映了机器人的末端执 行器能以任意姿态到达的点的灵活程度[15]。 λ = ∑m i=1 Di m (3) 式中:m 为工作空间中末端点的个数,Di 为机器 人每个末端点的灵活度。 上述 3 个指标越大,说明机器人的运动灵活 性、工作空间体积性能、灵活工作空间性能越好。 3.2 典型构型的指标对比 通过 3.1 节的性能指标对 iiwa、Sawyer、Yumi 进行分析并对比,结果如表 5 所示。 通过对比分析可以看出: 1) 由于偏置的存在,机器人关节的运动范围 发生变化。相对于 iiwa 构型,Sawyer 构型的偏置 导致了关节 J2、J4、J6 的运动范围增加;而 Yumi 构 型的偏置没有增加关节运动范围,但是使得关节 运动范围在某一方向增加,另一方向减小。 2) 对于工作空间截面,由于 Yumi 构型的偏 置使得关节运动范围在某一方向上增加,另一方 向上减小,因此导致空间截面不对称,使得一边 的工作空间增大,另一边的工作空间减小;而对 于 Sawyer 构型的偏置没有出现这一现象,只是工 作空间体积增加了。图 7 为工作空间截面分布图。 3) 两种偏置对工作空间体积指标都有一定的 降低,Sawyer 构型对性能指标降低的较明显;两 种偏置对全局性能指标都有一定的降低,Yumi 构 型对性能指标降低的较明显;两种偏置对灵活工 作空间指标都有一定的提高,Sawyer 构型对性能 指标提高的非常明显。 表 5 Iiwa、Sawyer、Yumi 构型分析对比 Table 5 Configuration analysis and comparison of Iiwa, Sawyer, Yumi 构型 Iiwa Sawyer Yumi 关节角度范围 −170°~170° −175°~175° −168.5°~168.5° −120°~120° −175°~175° −143.5°~43.5° −170°~170° −175°~175° −168.5°~168.5° −120°~120° −170.5°~170.5° −123.5°~80° −170°~170° −170.5°~170.5° −290°~290° −120°~120° −175°~175° −88°~138° −170°~170° −270°~270° −229°~229° QL 1.51 1.12 1.23 η 0.081 0.078 0.062 λ 0.713 4 0.825 0.745 1.0 0.5 0 −0.5 −1.0 −0.5 0 0.5 1.0 z/m x/m (a) Iiwa 1.0 0.5 0 −0.5 −1.0 −0.5 0 0.5 1.0 z/m x/m (b) Sawyer 第 2 期 田勇,等:协作机器人的构型分析研究 ·221·