正在加载图片...
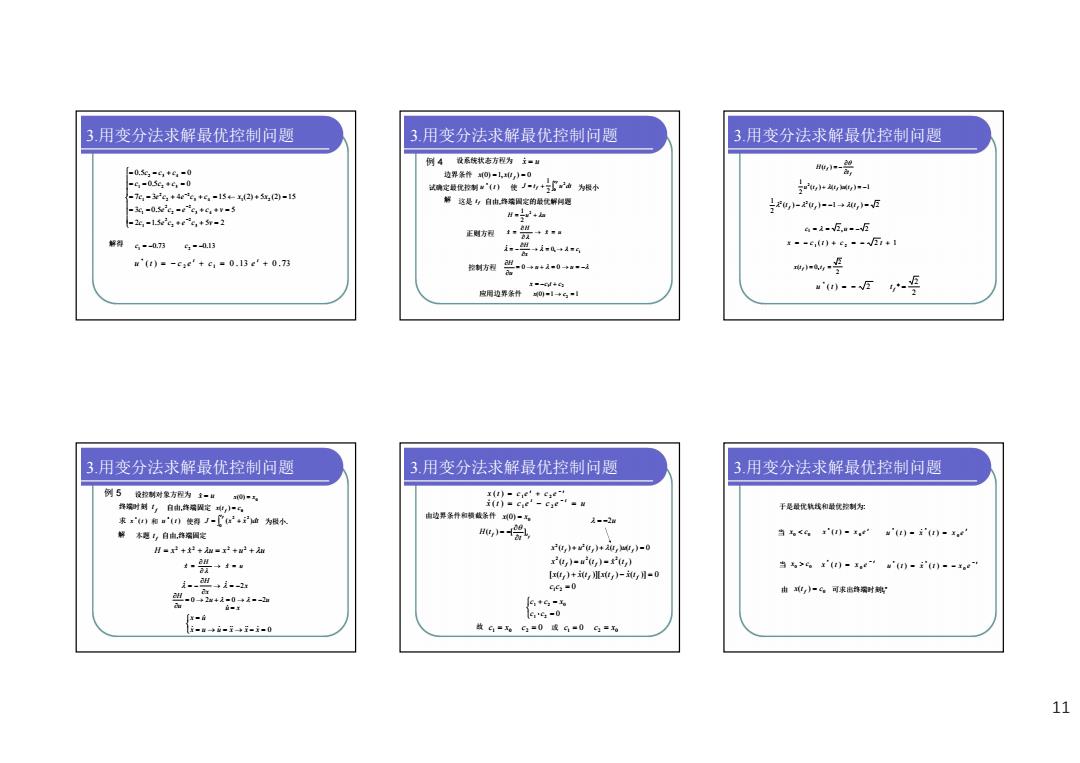
3.用变分法求解最优控制问题 3.用变分法求解最优控制问题 3.用变分法求解最优控制问题 例4投系统状志方程为立一“ -0.502-g1+6,-0 垃界条作0-1,0)-0 ,一器 -4-05644-0 这确定鼓优控制)使与+2油为极小 -7%-32g+4e,+6,-15←x29+52白-15 小4,- 解这是与白由择端国定的最优解问题 -36-0.5g%-e4c.+¥-5 ,小-u,-1→,-E Hn34a -26-1506e9g,+5折-2 a-2-5。--5 解得6-0.7乃 0.3 兽a4 --c,)+c:--i+1 m'()--ce'+c1=0.13e'+0.73 物制方程-0++及-0→d -号 +的 皮用边界条骨 w'--E 0-+马-1 小号 3.用变分法求解最优控制问题 3.用变分法求解最优控制问题 3.用变分法求解最优控制问题 例5授拉制对象方程为主一址 3()-cre'cse- 择端时刻1,自由,将鸡型定,)-一 i(1)=cue'-cze-w 于是量优轨线和最优控制左 求")和▣'()使得J-广任,恤为假水 由边舞条特和横截条件0)=马 2--2m 解本题,自由,路溶国定 ,尝 当。<4'u)-,e“'()-"u-x,e2 H-2++w=x2+w2+2m u,+2u,+2,,》-0 器 x2u)=m0,)=e, 当>4x')-ew')-')--e” [,)+,,)-,月-0 .明→-2 99-0 由,》一G可求地降端时魏 0-048a i-t 9,*4- 64-0 li-m→应-i+i-i-0 收4=x6G=0成9=09= 1111 2 1.5 5 2 3 0.5 5 7 3 4 15 (2) 5 (2) 15 0.5 0 0.5 0 3 2 2 2 1 3 4 2 2 2 1 3 4 1 2 2 2 2 1 1 2 3 2 3 4 c e c e c v c e c e c c v c e c e c c x x c c c c c c 解得 0.73 c1 0.13 c2 ( ) 0 . 13 0 .73 2 1 * t t u t c e c e 3.用变分法求解最优控制问题 例 4 设系统状态方程为 x u 边界条件 x(0) 1, x(t f ) 0 试确定最优控制 ( ) * u t 使 f t J t f u dt 0 2 2 1 为极小 解 这是 f t 自由,终端固定的最优解问题 H u u 2 2 1 正则方程 x u H x 1 0, c x H 控制方程 u u u H 0 0 应用边界条件 (0) 1 1 x c2 1 2 x c t c 3.用变分法求解最优控制问题 f f t H t ( ) ( ) ( ) ( ) 1 2 1 2 u t f t f u t f ( ) ( ) 1 ( ) 2 2 1 2 2 t f t f t f c1 2,u 2 x c 1 (t ) c 2 2 t 1 2 2 x(t f ) 0,t f ( ) 2 * u t 2 2 t f * 3.用变分法求解最优控制问题 例 5 设控制对象方程为 x u 0 x(0) x 终端时刻 f t 自由,终端固定 0 x(t ) c f 求 ( ) * x t 和 ( ) * u t 使得 f t J x x dt 0 2 2 ( ) 为极小. 解 本题 f t 自由,终端固定 H x x u x u u 2 2 2 2 x u H x x x H 2 u u u H 0 2 0 2 u x x u u x x x 0 x u 3.用变分法求解最优控制问题 t t x t c e c e 1 2 ( ) x t c e c e u t t 1 2 ( ) 由边界条件和横截条件 0 x(0) x f f t t H (t ) [ ] ( ) ( ) ( ) ( ) 0 2 2 x t f u t f t f u t f ( ) ( ) ( ) 2 2 2 f f f x t u t x t [ ( ) ( )][ ( ) ( )] 0 f f f f x t x t x t x t 0 c1c2 0 1 2 1 2 0 c c c c x 故 1 0 c x 0 c2 或 0 c1 2 0 c x 2u 3.用变分法求解最优控制问题 于是最优轨线和最优控制为: 当 0 0 x c t x t x e0 * ( ) t u t x t x e0 * * ( ) ( ) 当 0 0 x c t x t x e 0 * ( ) t u t x t x e 0 * * ( ) ( ) 0 x(t ) c 由 可求出终端时刻 f t f* 3.用变分法求解最优控制问题