正在加载图片...
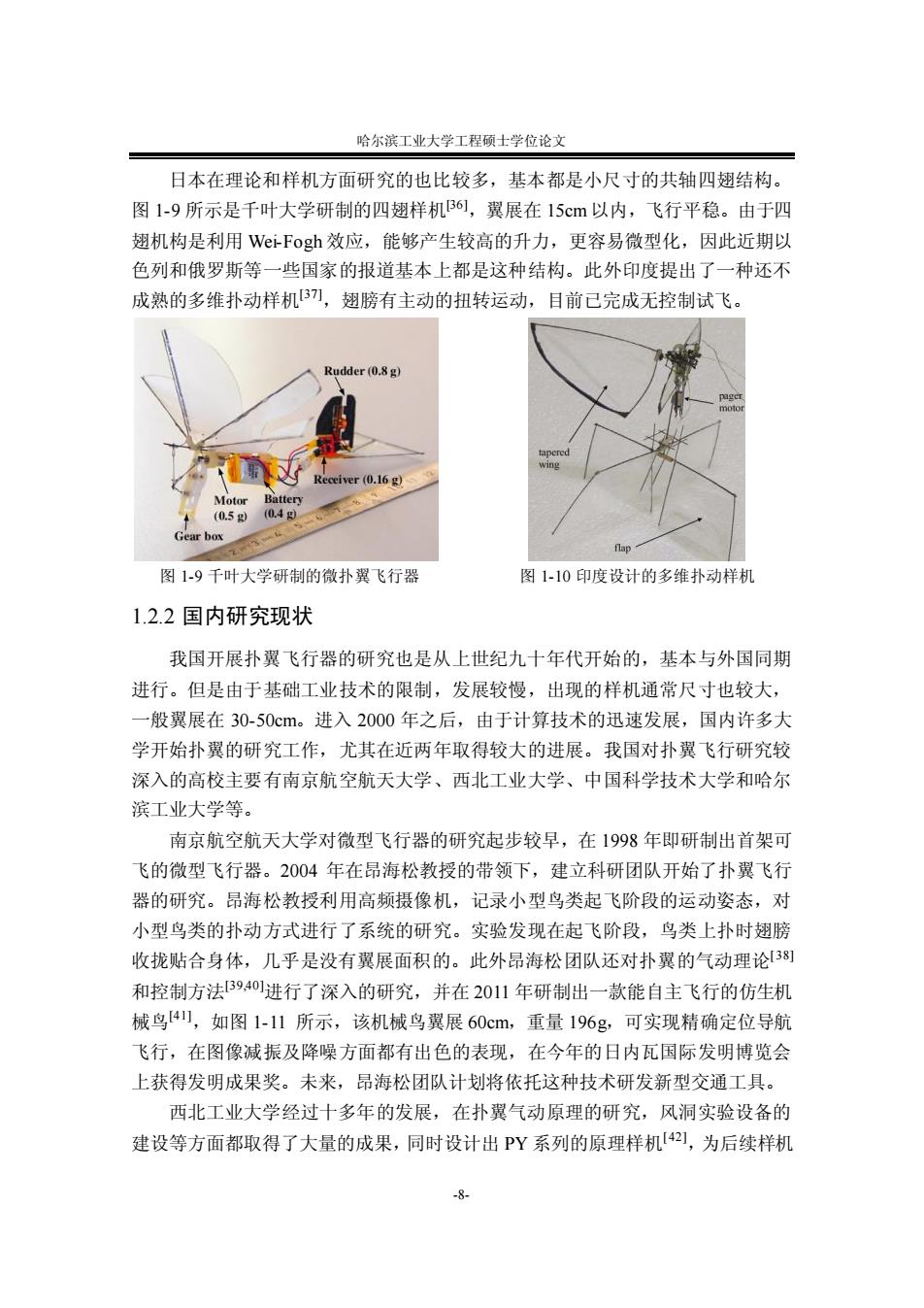
哈尔滨工业大学工程硕士学位论文 日本在理论和样机方面研究的也比较多,基本都是小尺寸的共轴四翅结构。 图1-9所示是千叶大学研制的四翅样机B6,翼展在15cm以内,飞行平稳。由于四 翅机构是利用Wei-Fogh效应,能够产生较高的升力,更容易微型化,因此近期以 色列和俄罗斯等一些国家的报道基本上都是这种结构。此外印度提出了一种还不 成熟的多维扑动样机刀,翅膀有主动的扭转运动,目前己完成无控制试飞。 Rudder(0.8 g) wing Receiver(0.16 g) Motor Battery (0.5g 0.4g Gear box flap 图1-9千叶大学研制的微扑翼飞行器 图1-10印度设计的多维扑动样机 1.2.2国内研究现状 我国开展扑翼飞行器的研究也是从上世纪九十年代开始的,基本与外国同期 进行。但是由于基础工业技术的限制,发展较慢,出现的样机通常尺寸也较大, 一般翼展在30-50cm。进入2000年之后,由于计算技术的迅速发展,国内许多大 学开始扑翼的研究工作,尤其在近两年取得较大的进展。我国对扑翼飞行研究较 深入的高校主要有南京航空航天大学、西北工业大学、中国科学技术大学和哈尔 滨工业大学等。 南京航空航天大学对微型飞行器的研究起步较早,在1998年即研制出首架可 飞的微型飞行器。2004年在昂海松教授的带领下,建立科研团队开始了扑翼飞行 器的研究。昂海松教授利用高频摄像机,记录小型鸟类起飞阶段的运动姿态,对 小型鸟类的扑动方式进行了系统的研究。实验发现在起飞阶段,鸟类上扑时翅膀 收拢贴合身体,几乎是没有翼展面积的。此外昂海松团队还对扑翼的气动理论[38) 和控制方法39,40进行了深入的研究,并在2011年研制出一款能自主飞行的仿生机 械鸟4,如图1-11所示,该机械鸟翼展60cm,重量196g,可实现精确定位导航 飞行,在图像减振及降噪方面都有出色的表现,在今年的日内瓦国际发明博览会 上获得发明成果奖。未来,昂海松团队计划将依托这种技术研发新型交通工具。 西北工业大学经过十多年的发展,在扑翼气动原理的研究,风洞实验设备的 建设等方面都取得了大量的成果,同时设计出PY系列的原理样机42),为后续样机 -8-哈尔滨工业大学工程硕士学位论文 -8- 日本在理论和样机方面研究的也比较多,基本都是小尺寸的共轴四翅结构。 图 1-9 所示是千叶大学研制的四翅样机[36],翼展在 15cm以内,飞行平稳。由于四 翅机构是利用 Wei-Fogh 效应,能够产生较高的升力,更容易微型化,因此近期以 色列和俄罗斯等一些国家的报道基本上都是这种结构。此外印度提出了一种还不 成熟的多维扑动样机[37],翅膀有主动的扭转运动,目前已完成无控制试飞。 图 1-9 千叶大学研制的微扑翼飞行器 图 1-10 印度设计的多维扑动样机 1.2.2 国内研究现状 我国开展扑翼飞行器的研究也是从上世纪九十年代开始的,基本与外国同期 进行。但是由于基础工业技术的限制,发展较慢,出现的样机通常尺寸也较大, 一般翼展在 30-50cm。进入 2000 年之后,由于计算技术的迅速发展,国内许多大 学开始扑翼的研究工作,尤其在近两年取得较大的进展。我国对扑翼飞行研究较 深入的高校主要有南京航空航天大学、西北工业大学、中国科学技术大学和哈尔 滨工业大学等。 南京航空航天大学对微型飞行器的研究起步较早,在 1998 年即研制出首架可 飞的微型飞行器。2004 年在昂海松教授的带领下,建立科研团队开始了扑翼飞行 器的研究。昂海松教授利用高频摄像机,记录小型鸟类起飞阶段的运动姿态,对 小型鸟类的扑动方式进行了系统的研究。实验发现在起飞阶段,鸟类上扑时翅膀 收拢贴合身体,几乎是没有翼展面积的。此外昂海松团队还对扑翼的气动理论[38] 和控制方法[39,40]进行了深入的研究,并在 2011 年研制出一款能自主飞行的仿生机 械鸟[41],如图 1-11 所示,该机械鸟翼展 60cm,重量 196g,可实现精确定位导航 飞行,在图像减振及降噪方面都有出色的表现,在今年的日内瓦国际发明博览会 上获得发明成果奖。未来,昂海松团队计划将依托这种技术研发新型交通工具。 西北工业大学经过十多年的发展,在扑翼气动原理的研究,风洞实验设备的 建设等方面都取得了大量的成果,同时设计出 PY 系列的原理样机[42],为后续样机