正在加载图片...
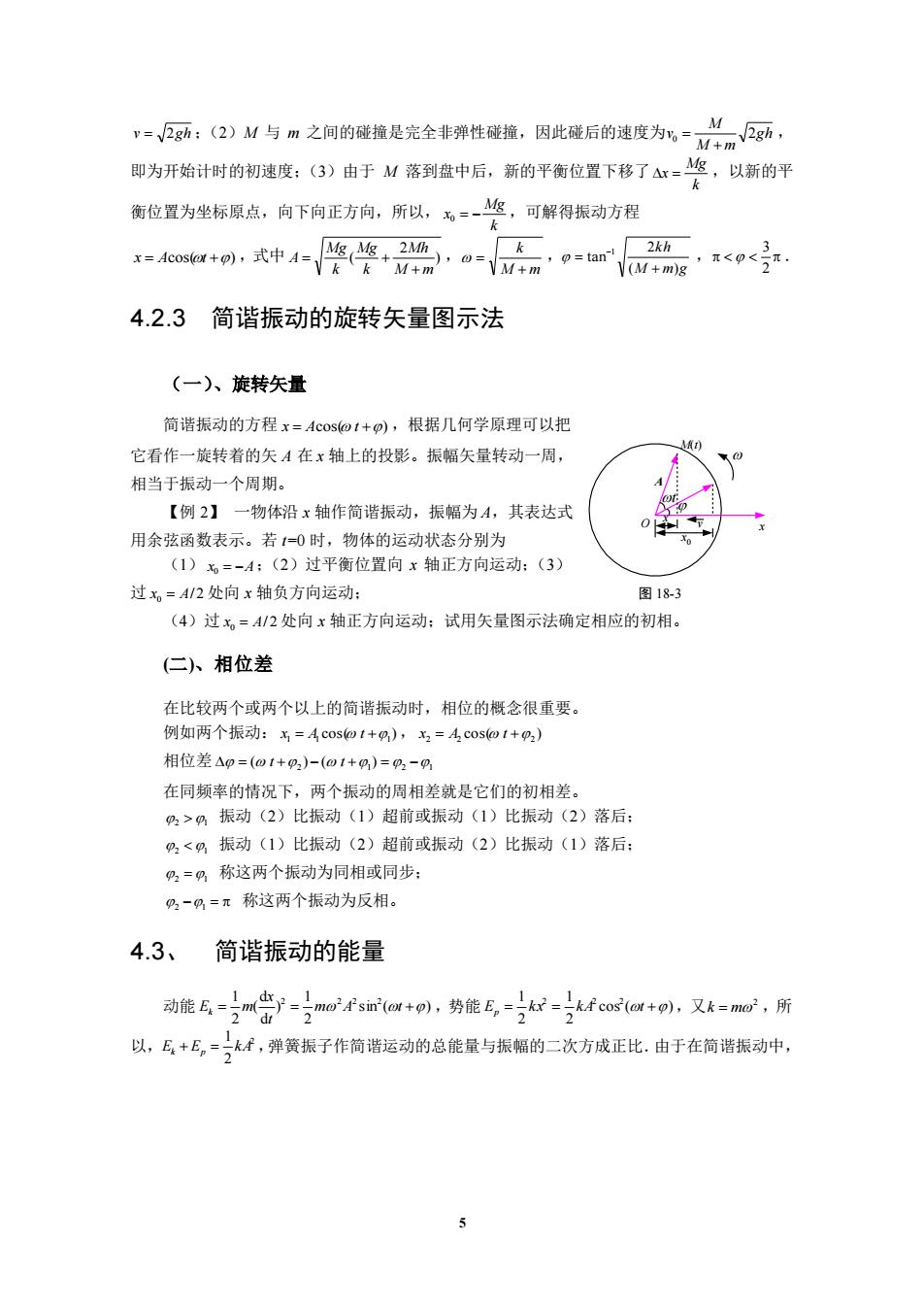
=2g动:(2)M与m之间的碰撞是完全非弹性碰撞,因此碰后的速度为,=牛mgh,一 即为开始计时的初速度:(3)由于M落到盘中后,新的平衡位置下移了△x-修,以新的平 衡位置为坐标原点,向下向正方向,所以,=-竖,可解得振动方程 ,神4-受学票,。 k ,r<p<π 4.2.3简谐振动的旋转矢量图示法 (一)、旋转矢量 简谐振动的方程x=4cos@1+p),根据几何学原理可以把 它看作一旋转着的矢A在x轴上的投影。振幅矢量转动一周, 相当于振动一个周期。 【例2】一物体沿x轴作简谐振动,振幅为4,其表达式 用余弦函数表示。若10时,物体的运动状态分别为 (1)x=-A:(2)过平衡位置向x轴正方向运动:(3) 过,=A/2处向x轴负方向运动: 图183 (4)过x=4/2处向x轴正方向运动:试用矢量图示法确定相应的初相。 (二人、相位差 在比较两个或两个以上的简谐振动时,相位的概念很重要。 例如两个振动:为=4cos@1+g),x2=4c0s@1+) 相位差Ap=(o1+)-(o1+0)=- 在同频率的情况下,两个振动的周相差就是它们的初相差。 %>%振动(2)比振动(1)超前或振动(1)比振动(2)落后 ,<%振动(1)比振动(2)超前或振动(2)比振动(1)落后: %=?称这两个振动为同相或同步: 马-g=元称这两个振动为反相。 4.3、简谐振动的能量 动能6=m密=m0 Psn(+-p),势能E==k.fco(ew+pl,又k=mo,所 以,(+5,=,弹簧振子作简谐运动的总能量与振幅的二次方成正比,由于在简谐振动中, 5 v = 2gh ;(2)M 与 m 之间的碰撞是完全非弹性碰撞,因此碰后的速度为 gh M m M v0 2 + = , 即为开始计时的初速度;(3)由于 M 落到盘中后,新的平衡位置下移了 k Mg x = ,以新的平 衡位置为坐标原点,向下向正方向,所以, k Mg x0 = − ,可解得振动方程 x = Acos(t +) ,式中 ) 2 ( M m Mh k Mg k Mg A + = + , M m k + = , M m g kh ( ) 2 tan 1 + = − , 2 3 . 4.2.3 简谐振动的旋转矢量图示法 (一)、旋转矢量 简谐振动的方程 x = Acos( t +) ,根据几何学原理可以把 它看作一旋转着的矢 A 在 x 轴上的投影。振幅矢量转动一周, 相当于振动一个周期。 【例 2】 一物体沿 x 轴作简谐振动,振幅为 A,其表达式 用余弦函数表示。若 t=0 时,物体的运动状态分别为 (1) x0 = −A ;(2)过平衡位置向 x 轴正方向运动;(3) 过 x0 = A/ 2 处向 x 轴负方向运动; 图 18-3 (4)过 x0 = A/ 2 处向 x 轴正方向运动;试用矢量图示法确定相应的初相。 (二)、相位差 在比较两个或两个以上的简谐振动时,相位的概念很重要。 例如两个振动: cos( ) 1 = 1 +1 x A t , cos( ) 2 = 2 +2 x A t 相位差 2 1 2 1 = ( t + ) − ( t + ) = − 在同频率的情况下,两个振动的周相差就是它们的初相差。 2 1 振动(2)比振动(1)超前或振动(1)比振动(2)落后; 2 1 振动(1)比振动(2)超前或振动(2)比振动(1)落后; 2 = 1 称这两个振动为同相或同步; 2 −1 = 称这两个振动为反相。 4.3、 简谐振动的能量 动能 sin ( ) 2 1 ) d d ( 2 1 2 2 2 2 = = m A t + t x Ek m ,势能 cos ( ) 2 1 2 1 2 2 2 Ep = k x = k A t + ,又 2 k = m ,所 以, 2 2 1 Ek + Ep = kA ,弹簧振子作简谐运动的总能量与振幅的二次方成正比.由于在简谐振动中, x x0 O x A M(t) t v