正在加载图片...
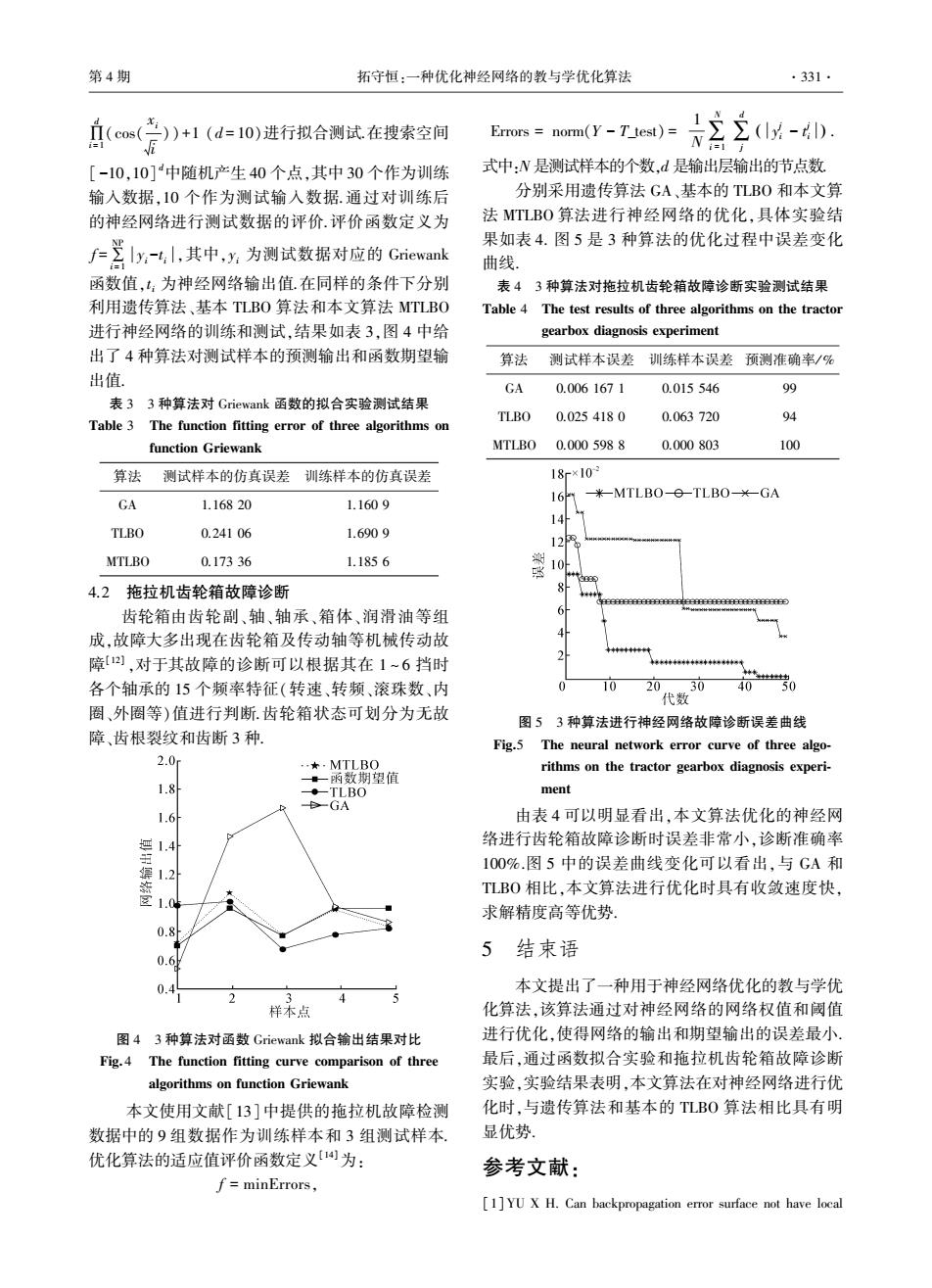
第4期 拓守恒:一种优化神经网络的教与学优化算法 .331· (cos(点)+1(d=10)进行拟合测试在搜素空间 Errors norm(Y-T_test)= [-10,10]中随机产生40个点,其中30个作为训练 式中:N是测试样本的个数,d是输出层输出的节点数 输入数据,10个作为测试输入数据.通过对训练后 分别采用遗传算法GA、基本的TLBO和本文算 的神经网络进行测试数据的评价.评价函数定义为 法MTLBO算法进行神经网络的优化,具体实验结 户三引x-4,其中,x为测试数据对应的Grievan止 果如表4.图5是3种算法的优化过程中误差变化 曲线 函数值,t:为神经网络输出值.在同样的条件下分别 表43种算法对拖拉机齿轮箱故障诊断实验测试结果 利用遗传算法、基本TLBO算法和本文算法MTLBO Table 4 The test results of three algorithms on the tractor 进行神经网络的训练和测试,结果如表3,图4中给 gearbox diagnosis experiment 出了4种算法对测试样本的预测输出和函数期望输 算法 测试样本误差训练样本误差预测准确率/% 出值. GA 0.0061671 0.015546 99 表33种算法对Griewank函数的拟合实验测试结果 TLBO 0.0254180 0.063720 94 Table 3 The function fitting error of three algorithms on function Griewank MTLB00.0005988 0.000803 100 算法 测试样本的仿真误差训练样本的仿真误差 18r×10 米-MTLBO--TLBO--GA GA 1.16820 1.1609 16 14 TLBO 0.24106 1.6909 12 MTLBO 0.17336 1.1856 10 4.2拖拉机齿轮箱故障诊断 齿轮箱由齿轮副、轴、轴承、箱体、润滑油等组 成,故障大多出现在齿轮箱及传动轴等机械传动故 障四),对于其故障的诊断可以根据其在1~6挡时 各个轴承的15个频率特征(转速、转频、滚珠数、内 1020 30 0 40 代数 圈、外圈等)值进行判断.齿轮箱状态可划分为无故 图53种算法进行神经网络故障诊断误差曲线 障、齿根裂纹和齿断3种 Fig.5 The neural network error curve of three algo- 2.0m ,★,MTLBO rithms on the tractor gearbox diagnosis experi- 一。一函数期望值 1.8 ·-TLBO ment BGA 1.6 由表4可以明显看出,本文算法优化的神经网 络进行齿轮箱故障诊断时误差非常小,诊断准确率 鏢 100%.图5中的误差曲线变化可以看出,与GA和 1.2 TLB0相比,本文算法进行优化时具有收敛速度快, 求解精度高等优势 0.8 5结束语 0.6 0.4 本文提出了一种用于神经网络优化的教与学优 c3 样本点 化算法,该算法通过对神经网络的网络权值和阈值 图43种算法对函数Griewank拟合输出结果对比 进行优化,使得网络的输出和期望输出的误差最小 Fig.4 The function fitting curve comparison of three 最后,通过函数拟合实验和拖拉机齿轮箱故障诊断 algorithms on function Griewank 实验,实验结果表明,本文算法在对神经网络进行优 本文使用文献[13]中提供的拖拉机故障检测 化时,与遗传算法和基本的TLB0算法相比具有明 数据中的9组数据作为训练样本和3组测试样本 显优势 优化算法的适应值评价函数定义[为: 参考文献: f=minErrors, [1]YU X H.Can backpropagation error surface not have local∏ d i = 1 (cos( xi i ))+1 (d = 10)进行拟合测试.在搜索空间 [ -10,10] d中随机产生 40 个点,其中 30 个作为训练 输入数据,10 个作为测试输入数据.通过对训练后 的神经网络进行测试数据的评价.评价函数定义为 f =∑ NP i = 1 yi -t i ,其中,yi 为测试数据对应的 Griewank 函数值,t i 为神经网络输出值.在同样的条件下分别 利用遗传算法、基本 TLBO 算法和本文算法 MTLBO 进行神经网络的训练和测试,结果如表 3,图 4 中给 出了 4 种算法对测试样本的预测输出和函数期望输 出值. 表 3 3 种算法对 Griewank 函数的拟合实验测试结果 Table 3 The function fitting error of three algorithms on function Griewank 算法 测试样本的仿真误差 训练样本的仿真误差 GA 1.168 20 1.160 9 TLBO 0.241 06 1.690 9 MTLBO 0.173 36 1.185 6 4.2 拖拉机齿轮箱故障诊断 齿轮箱由齿轮副、轴、轴承、箱体、润滑油等组 成,故障大多出现在齿轮箱及传动轴等机械传动故 障[12] ,对于其故障的诊断可以根据其在 1 ~ 6 挡时 各个轴承的 15 个频率特征(转速、转频、滚珠数、内 圈、外圈等)值进行判断.齿轮箱状态可划分为无故 障、齿根裂纹和齿断 3 种. 图 4 3 种算法对函数 Griewank 拟合输出结果对比 Fig. 4 The function fitting curve comparison of three algorithms on function Griewank 本文使用文献[13]中提供的拖拉机故障检测 数据中的 9 组数据作为训练样本和 3 组测试样本. 优化算法的适应值评价函数定义[14]为: f = minErrors, Errors = norm(Y - T_test) = 1 N∑ N i = 1 ∑ d j y j i - t j i ( ) . 式中:N 是测试样本的个数,d 是输出层输出的节点数. 分别采用遗传算法 GA、基本的 TLBO 和本文算 法 MTLBO 算法进行神经网络的优化,具体实验结 果如表 4. 图 5 是 3 种算法的优化过程中误差变化 曲线. 表 4 3 种算法对拖拉机齿轮箱故障诊断实验测试结果 Table 4 The test results of three algorithms on the tractor gearbox diagnosis experiment 算法 测试样本误差 训练样本误差 预测准确率/ % GA 0.006 167 1 0.015 546 99 TLBO 0.025 418 0 0.063 720 94 MTLBO 0.000 598 8 0.000 803 100 图 5 3 种算法进行神经网络故障诊断误差曲线 Fig.5 The neural network error curve of three algo⁃ rithms on the tractor gearbox diagnosis experi⁃ ment 由表 4 可以明显看出,本文算法优化的神经网 络进行齿轮箱故障诊断时误差非常小,诊断准确率 100%.图 5 中的误差曲线变化可以看出,与 GA 和 TLBO 相比,本文算法进行优化时具有收敛速度快, 求解精度高等优势. 5 结束语 本文提出了一种用于神经网络优化的教与学优 化算法,该算法通过对神经网络的网络权值和阈值 进行优化,使得网络的输出和期望输出的误差最小. 最后,通过函数拟合实验和拖拉机齿轮箱故障诊断 实验,实验结果表明,本文算法在对神经网络进行优 化时,与遗传算法和基本的 TLBO 算法相比具有明 显优势. 参考文献: [1]YU X H. Can backpropagation error surface not have local 第 4 期 拓守恒:一种优化神经网络的教与学优化算法 ·331·