正在加载图片...
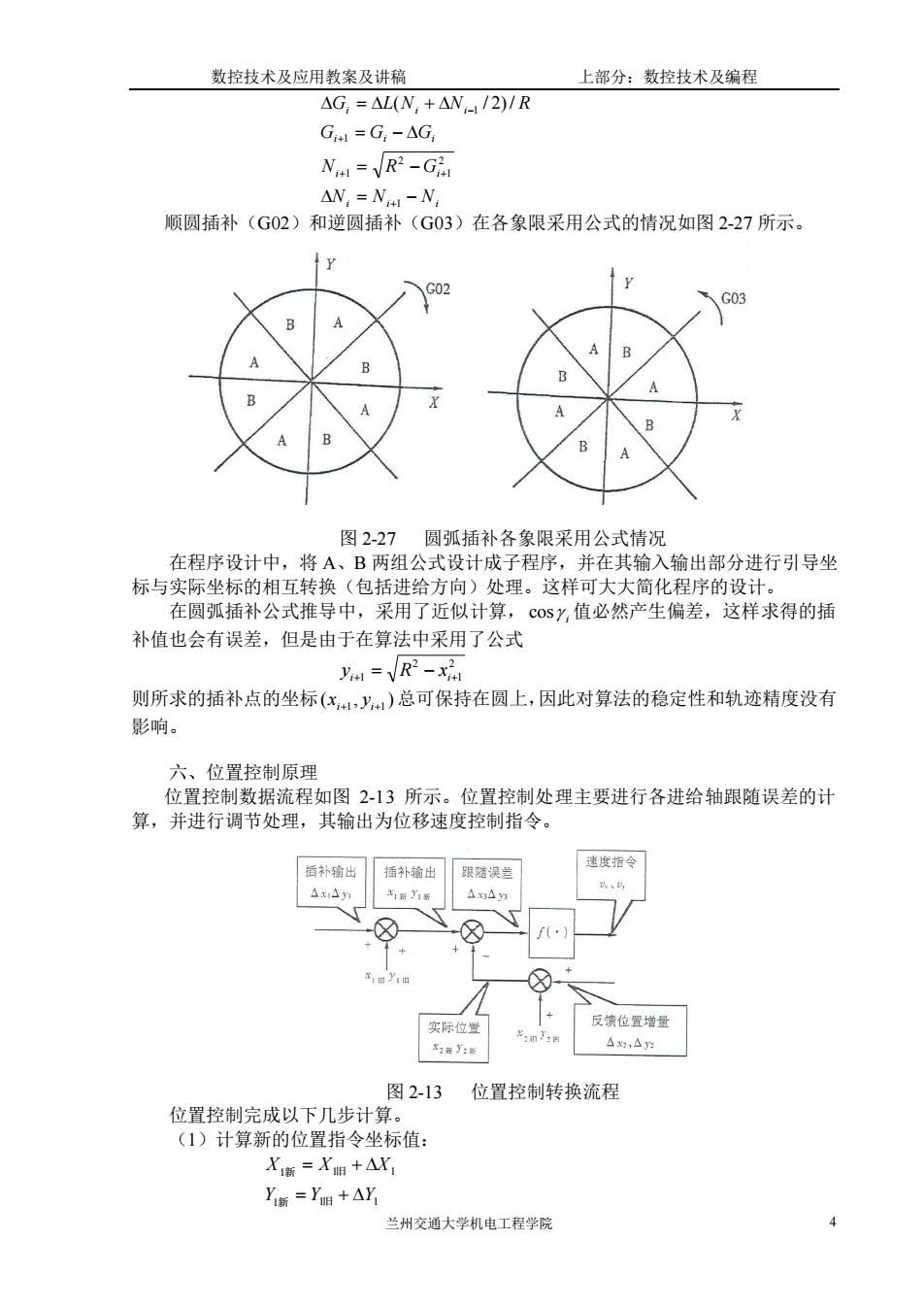
数控技术及应用教案及讲稿 上部分:数控技术及编程 △G,=△L(W,+△N-/2)/R G1=G,-△G, N=R2-G AN,=N-N, 顺圆插补(G02)和逆圆插补(G03)在各象限采用公式的情况如图2-27所示。 网))7圆[插补冬免限采用公式情识 在程序设计中,将A、B两组公式设计成子程序,并在其输入输出部分进行引导坐 标与实际坐标的相互转换(包括进给方向)处理。这样可大大简化程序的设计。 在圆弧插补公式推导中,采用了近似计算,csy,值必然产生偏差,这样求得的插 补值也会有误差,但是由于在算法中采用了公式 y=R2-x2 则所求的插补点的坐标(x,y)总可保持在圆上,因此对算法的稳定性和轨迹精度没有 影响。 六、位置控制原理 位置控制数据流程如图2-13所示。位置控制处理主要进行各进给轴跟随误差的计 算,并进行调节处理,其输出为位移速度控制指令。 补出 14 反资他置增品 #.n △2△: 图2-13位置控制转换流程 位置控制完成以下几步计 (1)计算新的位置指令坐标值: X商=X相+△X Ys=Y+AY 兰州交通大学机电工程学院 数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 4 i i i i i i i i i i i N N N N R G G G G G L N N R = − = − = − = + + + + + − 1 2 1 2 1 1 1 ( / 2)/ 顺圆插补(G02)和逆圆插补(G03)在各象限采用公式的情况如图 2-27 所示。 图 2-27 圆弧插补各象限采用公式情况 在程序设计中,将 A、B 两组公式设计成子程序,并在其输入输出部分进行引导坐 标与实际坐标的相互转换(包括进给方向)处理。这样可大大简化程序的设计。 在圆弧插补公式推导中,采用了近似计算, i cos 值必然产生偏差,这样求得的插 补值也会有误差,但是由于在算法中采用了公式 2 1 2 i+1 = − i+ y R x 则所求的插补点的坐标 ( , ) i+1 i+1 x y 总可保持在圆上,因此对算法的稳定性和轨迹精度没有 影响。 六、位置控制原理 位置控制数据流程如图 2-13 所示。位置控制处理主要进行各进给轴跟随误差的计 算,并进行调节处理,其输出为位移速度控制指令。 图 2-13 位置控制转换流程 位置控制完成以下几步计算。 (1)计算新的位置指令坐标值: 1 1 1 1 1 1 Y Y Y X X X = + = + 新 旧 新 旧