正在加载图片...
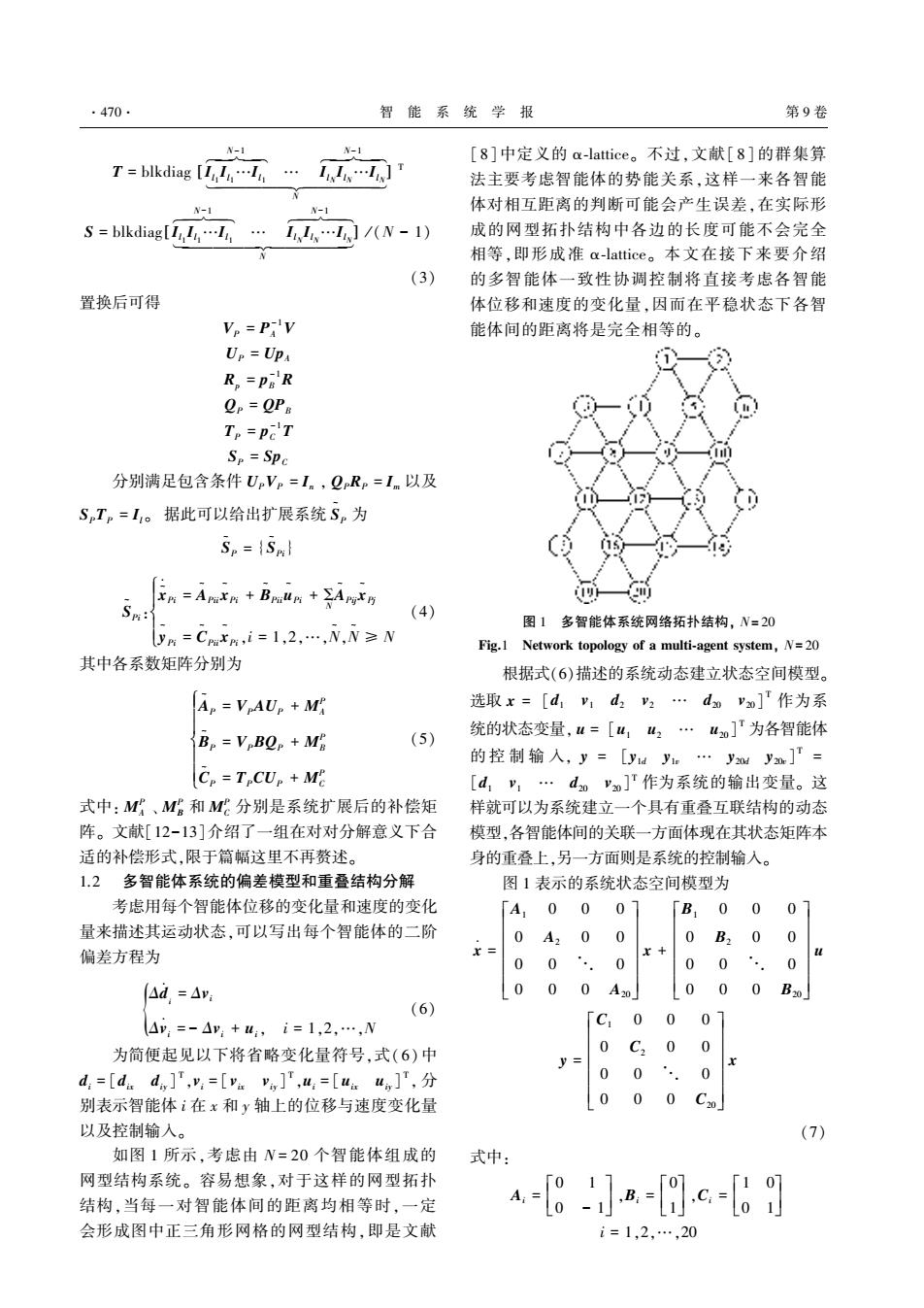
·470 智能系统学报 第9卷 N-1 [8]中定义的a-lattice。不过,文献[8]的群集算 T=blkdiag [IIIn In] 法主要考虑智能体的势能关系,这样一来各智能 N N-1 N-1 体对相互距离的判断可能会产生误差,在实际形 S=blkdiag[L,L,-l,… 1L、…LnJ/(N-1) 成的网型拓扑结构中各边的长度可能不会完全 N 相等,即形成准a-lattice。本文在接下来要介绍 (3) 的多智能体一致性协调控制将直接考虑各智能 置换后可得 体位移和速度的变化量,因而在平稳状态下各智 V=PiV 能体间的距离将是完全相等的。 Up=UpA R=PR'R Qp=QPa Tr=PC'T Sp=Spc 分别满足包含条件UpVp=In,QpRp=Inm以及 STp=L。据此可以给出扩展系统S。为 Sp=Spl xn=Aaxn+Braip+氵Agr5 (4) 图1多智能体系统网络拓扑结构,N=20 Uw=Cmx,i=1,2,…,N,N≥N Fig.1 Network topology of a multi-agent system,N=20 其中各系数矩阵分别为 根据式(6)描述的系统动态建立状态空间模型。 Ar V AUr +M 选取x=[d1y1d22…dwvo]作为系 统的状态变量,u=[u142…uo]为各智能体 Be=V BOp M (5) 的控制输人,y=[ydy。…ywym]T= Cp=T CU+M [d,,…dov0]T作为系统的输出变量。这 式中:M、Mg和ME分别是系统扩展后的补偿矩 样就可以为系统建立一个具有重叠互联结构的动态 阵。文献[12-13]介绍了一组在对对分解意义下合 模型,各智能体间的关联一方面体现在其状态矩阵本 适的补偿形式,限于篇幅这里不再赘述。 身的重叠上,另一方面则是系统的控制输入。 1.2多智能体系统的偏差模型和重叠结构分解 图1表示的系统状态空间模型为 考虑用每个智能体位移的变化量和速度的变化 「A100 07 「B10 0 07 量来描述其运动状态,可以写出每个智能体的二阶 0A20 0 0 B,0 0 偏差方程为 x x+ 0 0 0 0 0 0 △d=△v: 0 0 0 A20 0 0 0B0 (6) △y:=-△y:+w,i=1,2,…,N 「C 0 0 07 为简便起见以下将省略变化量符号,式(6)中 0 C2 0 0 d;=[d diy],v=[v vi]',ui=[ua u], 0 0 别表示智能体i在x和y轴上的位移与速度变化量 0 00 C2n 以及控制输入。 (7) 如图1所示,考虑由N=20个智能体组成的 式中: 网型结构系统。容易想象,对于这样的网型拓扑 结构,当每一对智能体间的距离均相等时,一定 4[8a=[9c=69 会形成图中正三角形网格的网型结构,即是文献 i=1,2,…,20栽 越 遭造噪凿蚤葬早 陨造员 陨造员 噎陨造员 晕原员 摇 噎摇 陨造晕 陨造晕噎陨造晕 晕原员 晕 栽 杂 越 遭造噪凿蚤葬早 陨造员 陨造员 噎陨造员 晕原员 摇 噎摇 陨造晕 陨造晕噎陨造晕 晕原员 晕 辕 渊晕 原 员冤 渊猿冤 置换后可得 灾孕 越 孕原员 粤 灾 哉孕 越 哉责粤 砸责 越 责 原员 月 砸 匝孕 越 匝孕月 栽孕 越 责 原员 悦 栽 杂孕 越 杂责悦 摇 摇 分别满足包含条件 哉孕灾孕 越 陨灶 袁 匝孕砸孕 越 陨皂 以及 杂孕 栽孕 越 陨造遥 据此可以给出扩展系统 杂 耀 孕 为 杂 耀 孕 越 喳杂 耀 孕蚤札 杂 耀 孕蚤院 曾 耀 窑 孕蚤 越 粤 耀 孕蚤蚤 曾 耀 孕蚤 垣 月 耀 孕蚤蚤怎 耀 孕蚤 垣 撞 晕 粤 耀 孕蚤躁曾 耀 孕躁 赠 耀 孕蚤 越 悦 耀 孕蚤蚤 曾 耀 孕蚤袁蚤 越 员袁圆袁噎袁晕 耀 袁晕 耀 逸 晕 渊源冤 其中各系数矩阵分别为 粤 耀 孕 越 灾孕粤哉孕 垣 酝孕 粤 月 耀 孕 越 灾孕月匝孕 垣 酝孕 月 悦 耀 孕 越 栽孕悦哉孕 垣 酝孕 悦 渊缘冤 式中院 酝孕 粤 尧 酝孕 月 和 酝孕 悦 分别是系统扩展后的补偿矩 阵遥 文献咱员圆原员猿暂介绍了一组在对对分解意义下合 适的补偿形式袁限于篇幅这里不再赘述遥 员援圆 摇 多智能体系统的偏差模型和重叠结构分解 考虑用每个智能体位移的变化量和速度的变化 量来描述其运动状态袁可以写出每个智能体的二阶 偏差方程为 驻凿 窑 蚤 越 驻增蚤 驻增 窑 蚤 越 原 驻增蚤 垣 怎蚤袁摇 蚤 越 员袁圆袁噎袁晕 渊远冤 摇 摇 为简便起见以下将省略变化量符号袁式渊远冤 中 凿蚤 越 咱凿蚤曾 凿蚤赠暂 栽 袁增蚤 越 咱增蚤曾 增蚤赠暂 栽 袁怎蚤 越 咱怎蚤曾 怎蚤赠暂 栽 袁 分 别表示智能体 蚤 在 曾 和 赠 轴上的位移与速度变化量 以及控制输入遥 摇 摇 如图 员 所示袁考虑由 晕 越 圆园 个智能体组成的 网型结构系统遥 容易想象袁对于这样的网型拓扑 结构袁当每一对智能体间的距离均相等时袁一定 会形成图中正三角形网格的网型结构袁即是文献 咱愿暂中定义的 琢鄄造葬贼贼蚤糟藻遥 不过袁文献咱愿暂 的群集算 法主要考虑智能体的势能关系袁这样一来各智能 体对相互距离的判断可能会产生误差袁在实际形 成的网型拓扑结构中各边的长度可能不会完全 相等袁即形成准 琢鄄造葬贼贼蚤糟藻遥 本文在接下来要介绍 的多智能体一致性协调控制将直接考虑各智能 体位移和速度的变化量袁因而在平稳状态下各智 能体间的距离将是完全相等的遥 图 员摇 多智能体系统网络拓扑结构袁 晕越 圆园 云蚤早援员摇 晕藻贼憎燥则噪 贼燥责燥造燥早赠 燥枣 葬 皂怎造贼蚤鄄葬早藻灶贼 泽赠泽贼藻皂袁 晕越 圆园 根据式渊远冤描述的系统动态建立状态空间模型遥 选取 曾 越 咱凿员 增员 凿圆 增圆 噎 凿圆园 增圆园 暂 栽 作为系 统的状态变量袁 怎 越 咱怎员 怎圆 摇 噎摇 怎圆园 暂 栽 为各智能体 的控制输入袁 赠 越 咱赠员凿 赠员增摇 噎摇 赠圆园凿 赠圆园增暂 栽 越 咱凿员 增员 摇 噎摇 凿圆园 增圆园 暂 栽 作为系统的输出变量遥 这 样就可以为系统建立一个具有重叠互联结构的动态 模型袁各智能体间的关联一方面体现在其状态矩阵本 身的重叠上袁另一方面则是系统的控制输入遥 图 员 表示的系统状态空间模型为 曾 窑 越 粤员 园园 园 园 粤圆 园 园 园 园埙园 园园园 粤圆园 曾 垣 月员 园园 园 园 月圆 园 园 园 园埙 园 园园园 月圆园 怎 赠 越 悦员 园园 园 园 悦圆 园 园 园 园埙园 园园园 悦圆园 曾 渊苑冤 式中院 粤蚤 越 园 员 园 原 员 袁月蚤 越 园 员 袁悦蚤 越 员 园 园 员 蚤 越 员袁圆袁噎袁圆园 窑源苑园窑 智 能 系 统 学 报摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇 第 怨 卷