正在加载图片...
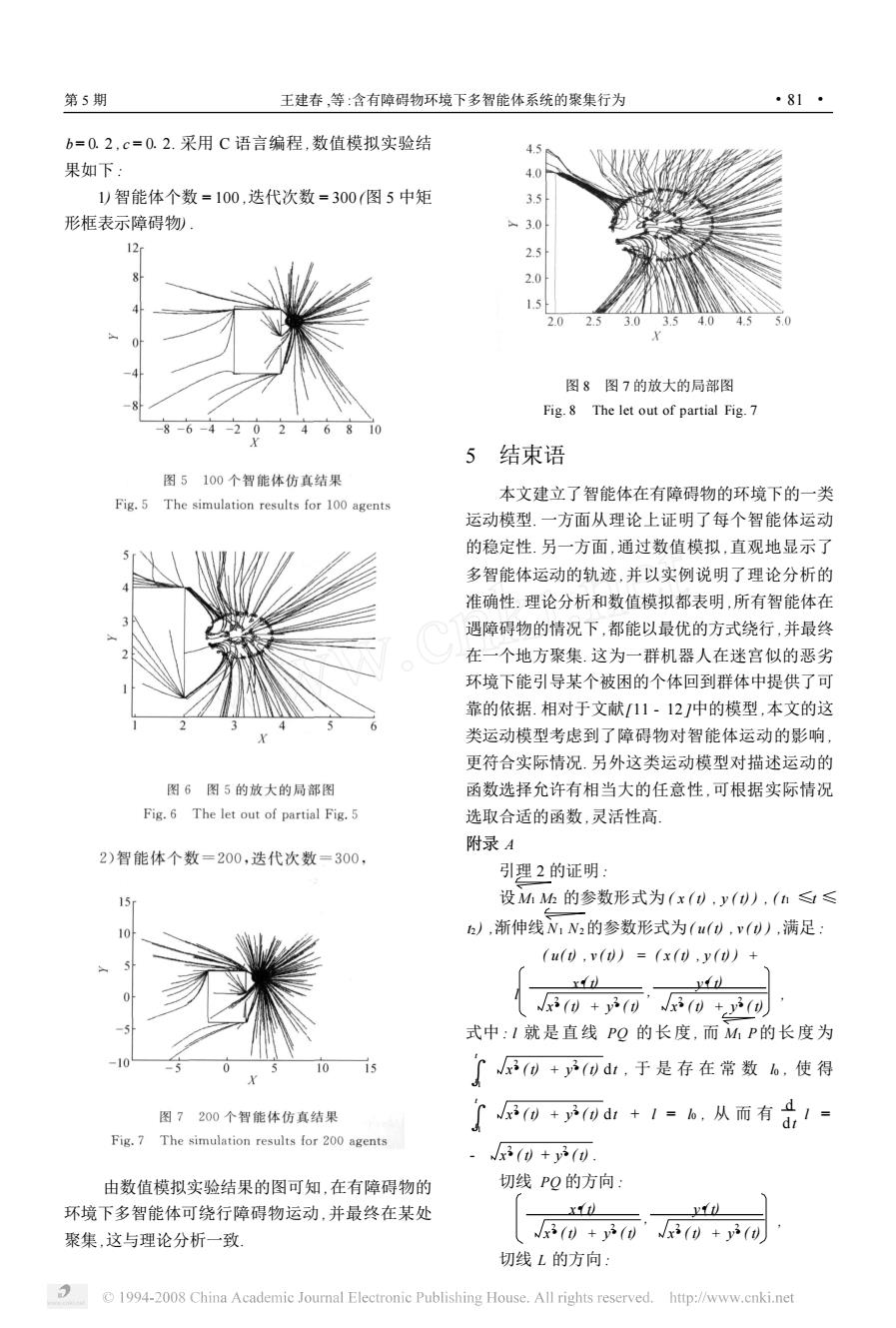
第5期 王建春,等:含有障碍物环境下多智能体系统的聚集行为 ·81· b=0.2,c=0.2.采用C语言编程,数值模拟实验结 4.5 果如下: ¥0 1)智能体个数=100,迭代次数=300(图5中矩 3.5 形框表示障碍物) 30 12 2.5 2.0 1.5 30 3.5 4.0 4 图8图7的放大的局部图 Fig.8 The let out of partial Fig.7 246810 5结束语 图5100个智能体仿真结果 本文建立了智能体在有障碍物的环境下的一类 Fig.5 The simulation results for 100 agents 运动模型.一方面从理论上证明了每个智能体运动 的稳定性.另一方面,通过数值模拟,直观地显示了 多智能体运动的轨迹,并以实例说明了理论分析的 准确性.理论分析和数值模拟都表明,所有智能体在 遇障碍物的情况下,都能以最优的方式绕行,并最终 在一个地方聚集.这为一群机器人在迷宫似的恶劣 环境下能引导某个被困的个体回到群体中提供了可 靠的依据.相对于文献11-12]中的模型,本文的这 类运动模型考虑到了障碍物对智能体运动的影响, 更符合实际情况.另外这类运动模型对描述运动的 图6图5的放大的局部图 函数选择允许有相当大的任意性,可根据实际情况 Fig.6 The let out of partial Fig.5 选取合适的函数,灵活性高」 附录A 2)智能体个数=200,迭代次数=300, 引理2的证明: 15 设Mh的参数形式为(x(),y(),(n≤≤ ),渐伸线N,N2的参数形式为(u(),v(),满足: (u(),v())=(x(),y()+ 3()+y(0’x3()+3( 式中:1就是直线PQ的长度,而MP的长度为 10 15 N3()+3(dr,于是存在常数6,使得 图7200个智能体仿真结果 0+0:+1=,从而有1= Fig.7 The simulation results for 200 agents x3()+y() 由数值模拟实验结果的图可知,在有障碍物的 切线PQ的方向: 环境下多智能体可绕行障碍物运动,并最终在某处 x 聚集,这与理论分析一致, Nx3()+3(刊 ’()+y2() 切线L的方向: 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.netb = 012 , c = 012. 采用 C 语言编程 ,数值模拟实验结 果如下 : 1) 智能体个数 = 100 ,迭代次数 = 300 (图 5 中矩 形框表示障碍物) . 由数值模拟实验结果的图可知 ,在有障碍物的 环境下多智能体可绕行障碍物运动 ,并最终在某处 聚集 ,这与理论分析一致. 图 8 图 7 的放大的局部图 Fig. 8 The let out of partial Fig. 7 5 结束语 本文建立了智能体在有障碍物的环境下的一类 运动模型. 一方面从理论上证明了每个智能体运动 的稳定性. 另一方面 ,通过数值模拟 ,直观地显示了 多智能体运动的轨迹 ,并以实例说明了理论分析的 准确性. 理论分析和数值模拟都表明 ,所有智能体在 遇障碍物的情况下 ,都能以最优的方式绕行 ,并最终 在一个地方聚集. 这为一群机器人在迷宫似的恶劣 环境下能引导某个被困的个体回到群体中提供了可 靠的依据. 相对于文献[11 - 12 ]中的模型 ,本文的这 类运动模型考虑到了障碍物对智能体运动的影响 , 更符合实际情况. 另外这类运动模型对描述运动的 函数选择允许有相当大的任意性 ,可根据实际情况 选取合适的函数 ,灵活性高. 附录 A 引理 2 的证明 : 设M1 M2 的参数形式为 ( x ( t) , y ( t) ) , ( t1 ≤t ≤ t2 ) ,渐伸线N1 N2的参数形式为( u( t) , v ( t) ) ,满足 : ( u( t) , v ( t) ) = ( x ( t) , y ( t) ) + l x·( t) x·2 ( t) + y·2 ( t) , y·( t) x·2 ( t) + y·2 ( t) , 式中 : l 就是直线 PQ 的长度 , 而 M1 P的长度为 ∫ t t 1 x·2 ( t) + y·2 ( t) dt , 于 是 存 在 常 数 l0 , 使 得 ∫ t t 1 x·2 ( t) + y·2 ( t) dt + l = l0 , 从 而 有 d dt l = - x·2 ( t) + y·2 ( t) . 切线 PQ 的方向 : x·( t) x·2 ( t) + y·2 ( t) , y·( t) x·2 ( t) + y·2 ( t) , 切线 L 的方向 : 第 5 期 王建春 ,等 :含有障碍物环境下多智能体系统的聚集行为 · 18 ·