正在加载图片...
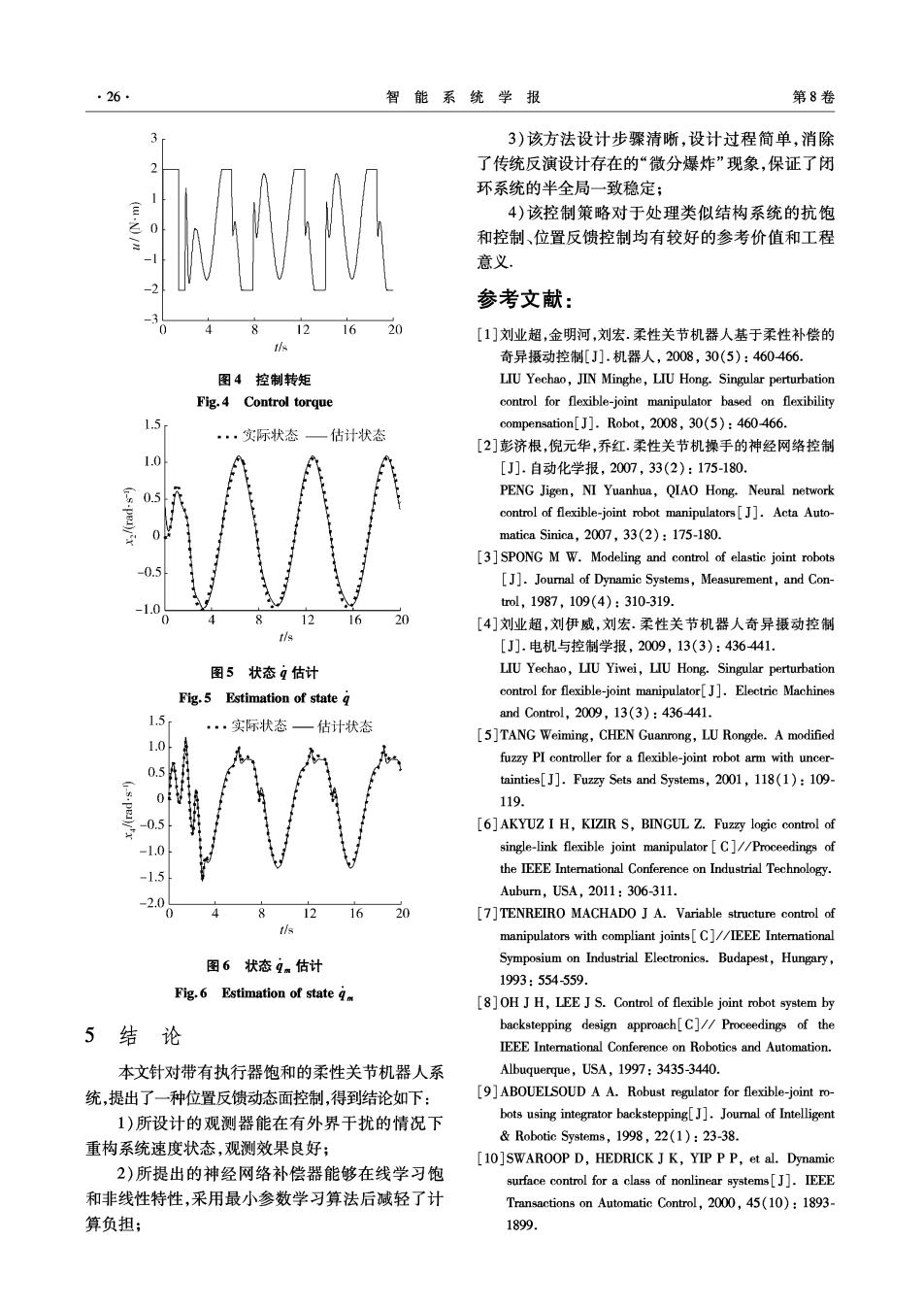
·26 智能系统学报 第8卷 3)该方法设计步骤清晰,设计过程简单,消除 了传统反演设计存在的“微分爆炸”现象,保证了闭 非 环系统的半全局一致稳定; 4)该控制策略对于处理类似结构系统的抗饱 和控制、位置反馈控制均有较好的参考价值和工程 意义 参考文献: 12 16 20 [1]刘业超,金明河,刘宏.柔性关节机器人基于柔性补偿的 tis 奇异摄动控制[J].机器人,2008,30(5):460466. 图4控制转矩 LIU Yechao,JIN Minghe,LIU Hong.Singular perturbation Fig.4 Control torque control for flexible-joint manipulator based on flexibility 1.5 ·实际状态一估计状态 compensation[J].Robot,2008,30(5):460-466. [2]彭济根,倪元华,乔红.柔性关节机操手的神经网络控制 1.0 [J].自动化学报,2007,33(2):175-180. 0.5 PENG Jigen,NI Yuanhua,QIAO Hong.Neural network control of flexible-joint robot manipulators[J].Acta Auto- matica Sinica,2007,33(2):175-180. [3]SPONG M W.Modeling and control of elastic joint robots 0.5 [J].Journal of Dynamic Systems,Measurement,and Con- 1.0 tol,1987,109(4):310-319. 12 16 20 [4]刘业超,刘伊威,刘宏.柔性关节机器人奇异摄动控制 t/s [J].电机与控制学报,2009,13(3):436441. 图5状态g估计 LIU Yechao,LIU Yiwei,LIU Hong.Singular perturbation Fig.5 Estimation of state g control for flexible-joint manipulator[J].Electric Machines 1.5 and Control,2009,13(3):436441. .·实际状态一估计状态 [5]TANG Weiming,CHEN Guanrong,LU Rongde.A modified 1.0 fuzzy PI controller for a flexible-joint robot arm with uncer- 05 tainties[J].Fuzzy Sets and Systems,2001,118(1):109- 119. -0.5 [6]AKYUZ I H,KIZIR S,BINGUL Z.Fuzzy logic control of single-link flexible joint manipulator[C]//Proceedings of the IEEE Interational Conference on Industrial Technology Auburn,USA,2011:306-311. 2.0 16 20 [7]TENREIRO MACHADO J A.Variable structure control of manipulators with compliant joints[C]//IEEE Interational 图6状态9m估计 Symposium on Industrial Electronics.Budapest,Hungary, 1993:554-559. Fig.6 Estimation of state gm [8]OH J H,LEE J S.Control of flexible joint robot system by 5结论 backstepping design approach[C]//Proceedings of the IEEE Interational Conference on Robotics and Automation. 本文针对带有执行器饱和的柔性关节机器人系 Albuquerque,USA,1997:3435-3440. 统,提出了一种位置反馈动态面控制,得到结论如下: [9]ABOUELSOUD AA.Robust regulator for flexible-joint ro- 1)所设计的观测器能在有外界干扰的情况下 bots using integrator backstepping[J].Joumal of Intelligent Robotic Systems,1998,22(1):23-38. 重构系统速度状态,观测效果良好; [10]SWAROOP D,HEDRICK J K,YIP PP,et al.Dynamic 2)所提出的神经网络补偿器能够在线学习饱 surface control for a class of nonlinear systems[J].IEEE 和非线性特性,采用最小参数学习算法后减轻了计 Transactions on Automatic Control,2000,45(10):1893- 算负担; 1899