正在加载图片...
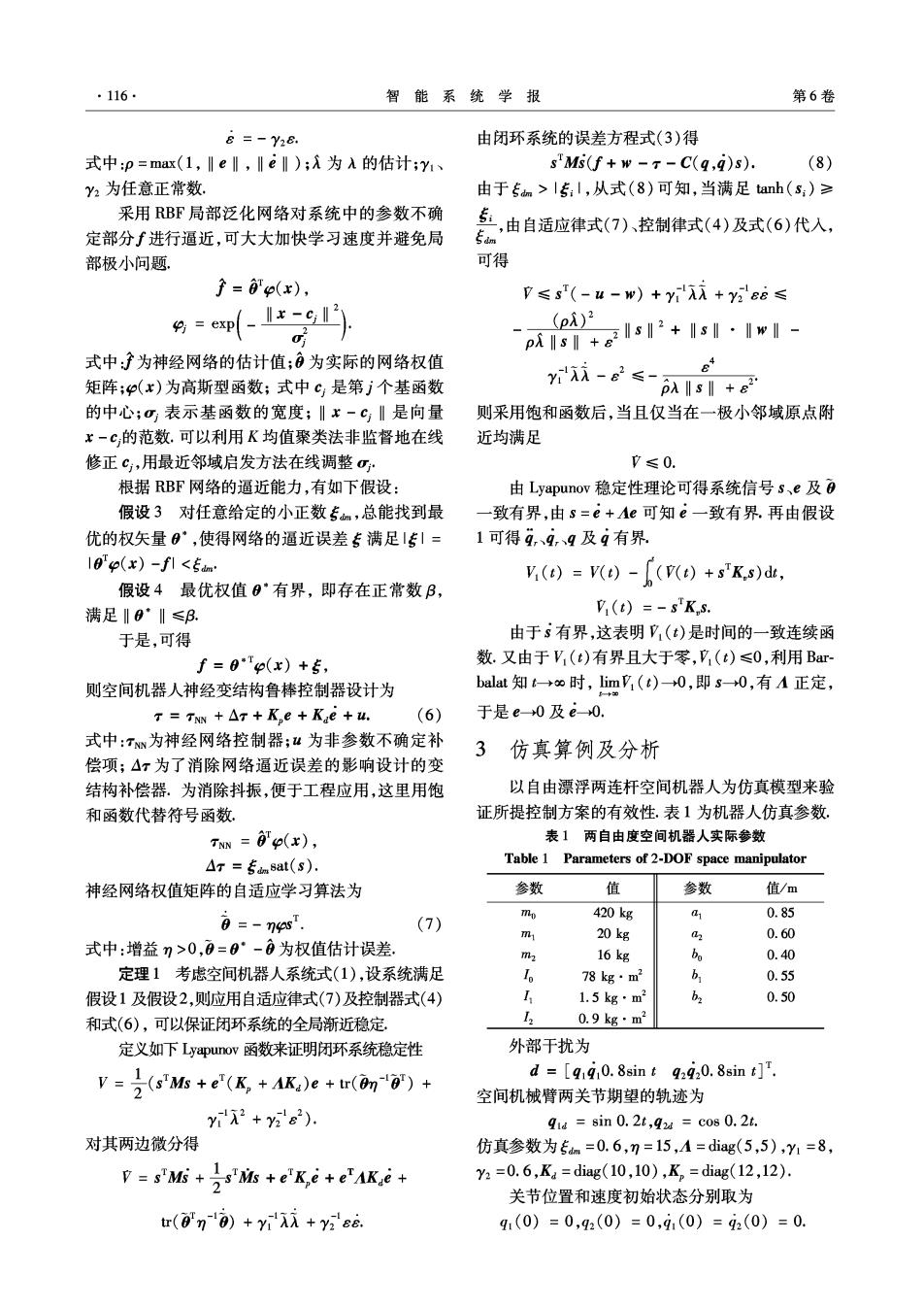
·116 智能系统学报 第6卷 8=-Y2&. 由闭环系统的误差方程式(3)得 式中:p=max(1,‖e‖,‖e‖);X为入的估计;y1、 sMs(f+w-T-C(q,q)s). (8) Y2为任意正常数. 由于专加>|专:l,从式(8)可知,当满足tanh(s:)≥ 采用RBF局部泛化网络对系统中的参数不确 定部分∫进行逼近,可大大加快学习速度并避免局 ,由自适应律式(7)、控制律式(4)及式(6)代入, 部极小问题. 可得 子=p(x), 7≤s(-u-w)+yii+y2e8≤ exp- x-G2 piis+6ls2+Is·Iw1- (p)2 式中:子为神经网络的估计值;为实际的网络权值 4 矩阵;p(x)为高斯型函数;式中c是第j个基函数 Yii-6≤-Al8l+e 的中心;o表示基函数的宽度;‖x-c‖是向量 则采用饱和函数后,当且仅当在一极小邻域原点附 x一c的范数.可以利用K均值聚类法非监督地在线 近均满足 修正c:,用最近邻域启发方法在线调整σ· V≤0. 根据RBF网络的逼近能力,有如下假设: 由Lyapunov稳定性理论可得系统信号s、e及0 假设3对任意给定的小正数专,总能找到最 一致有界,由s=e+Ae可知e一致有界.再由假设 优的权矢量0°,使得网络的逼近误差专满足[51= 1可得9,、4,、9及9有界. I0p(x)-fl<专m Vi(t)=V(t)-(V(t)+s"K.s)dt, 假设4最优权值0·有界,即存在正常数B, 满足‖0·‖≤B. V(t)=-sK.s 于是,可得 由于S有界,这表明(t)是时间的一致连续函 ∫=0(x)+专, 数.又由于V,(t)有界且大于零,,(t)≤0,利用Bar 则空间机器人神经变结构鲁棒控制器设计为 balat知t→o时,lim1(t)+0,即s→0,有A正定, T=TNw+△T+K,e+Ke+. (6) 于是e0及e0. 式中:T为神经网络控制器;u为非参数不确定补 3仿真算例及分析 偿项;△r为了消除网络逼近误差的影响设计的变 结构补偿器。为消除抖振,便于工程应用,这里用饱 以自由漂浮两连杆空间机器人为仿真模型来验 和函数代替符号函数, 证所提控制方案的有效性.表1为机器人仿真参数 TN=(x), 表1两自由度空间机器人实际参数 △r=专msat(s). Table 1 Parameters of 2-DOF space manipulator 神经网络权值矩阵的自适应学习算法为 参数 值 参数 值/m 0=-ngas". m 420kg a 0.85 (7) m 20 kg 0.60 式中:增益η>0,0=0°-0为权值估计误差 m2 16 kg 0.40 定理1考虑空间机器人系统式(1),设系统满足 78kg·m2 b 0.55 假设1及假设2,则应用自适应律式(7)及控制器式(4) 1.5kg·m bz 0.50 和式(6),可以保证闭环系统的全局渐近稳定, 0.9kg·m2 定义如下Lyapunov函数来证明闭环系统稳定性 外部干扰为 V=(s'Ms+e(K,+AK.)e+u(on)+ d =[91910.8sin t 92g20.8sin t]. 空间机械臂两关节期望的轨迹为 yi2+y2e2). gid sin 0.2t,q=cos 0.2t. 对其两边微分得 仿真参数为5m=0.6,m=15,M=diag(5,5),Y1=8, V-sM+75ck6+eAk6+ y2=0.6,Ka=diag(10,10),K=diag(12,12). 关节位置和速度初始状态分别取为 tr(o'n)+yia+yis6. q1(0)=0,92(0)=0,9(0)=92(0)=0