正在加载图片...
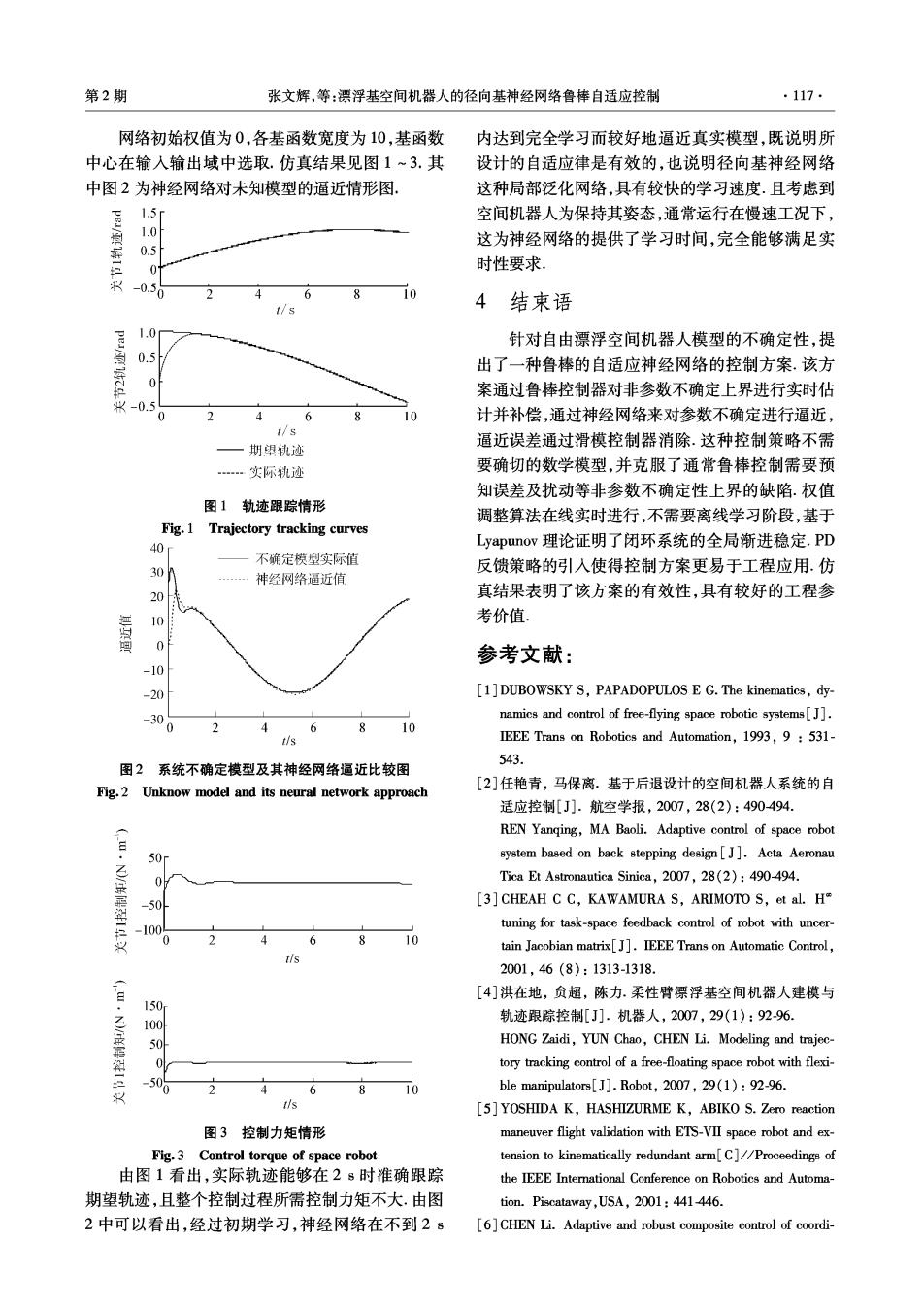
第2期 张文辉,等:漂浮基空间机器人的径向基神经网络鲁棒自适应控制 ·117· 网络初始权值为0,各基函数宽度为10,基函数 内达到完全学习而较好地逼近真实模型,既说明所 中心在输人输出域中选取.仿真结果见图1~3.其 设计的自适应律是有效的,也说明径向基神经网络 中图2为神经网络对未知模型的逼近情形图.。 这种局部泛化网络,具有较快的学习速度.且考虑到 1.5 空间机器人为保持其姿态,通常运行在慢速工况下, 1.0 这为神经网络的提供了学习时间,完全能够满足实 0.5 时性要求 -0.5 0 4结束语 1.0 针对自由漂浮空间机器人模型的不确定性,提 0.5 出了一种鲁棒的自适应神经网络的控制方案.该方 案通过鲁棒控制器对非参数不确定上界进行实时估 -0.5 0 4 6 10 计并补偿,通过神经网络来对参数不确定进行逼近, t/s 逼近误差通过滑模控制器消除.这种控制策略不需 一期望轨迹 …实际轨 要确切的数学模型,并克服了通常鲁棒控制需要预 知误差及扰动等非参数不确定性上界的缺陷.权值 图1轨迹跟踪情形 调整算法在线实时进行,不需要离线学习阶段,基于 Fig.1 Trajectory tracking curves 40 Lyapunov理论证明了闭环系统的全局渐进稳定.PD 不确定模型实际值 301 反馈策略的引入使得控制方案更易于工程应用.仿 神经网路逼近值 20 真结果表明了该方案的有效性,具有较好的工程参 10 考价值 参考文献: -10 -20 [1]DUBOWSKY S,PAPADOPULOS E G.The kinematics,dy- 300 namics and control of free-flying space robotic systems[]. 4 6 8 10 t/s IEEE Trans on Robotics and Automation,1993,9 531- 543 图2系统不确定模型及其神经网络逼近比较图 Fig.2 Unknow model and its neural network approach [2]任艳青,马保离.基于后退设计的空间机器人系统的自 适应控制[J].航空学报,2007,28(2):490-494。 REN Yanging,MA Baoli.Adaptive control of space robot 50 system based on back stepping design[J].Acta Aeronau 0 Tica Et Astronautica Sinica,2007,28(2):490-494. -50 [3]CHEAH CC.KAWAMURA S,ARIMOTO S,et al.H 100 tuning for task-space feedback control of robot with uncer- 10 tain Jacobian matrix[J].IEEE Trans on Automatic Control, 2001,46(8):1313-1318. [4]洪在地,负超,陈力.柔性臂漂浮基空间机器人建模与 150 轨迹跟踪控制[J].机器人,2007,29(1):92-96. 100 50 HONG Zaidi,YUN Chao,CHEN Li.Modeling and trajec- tory tracking control of a free-floating space robot with flexi- 50 10 ble manipulators[J].Robot,2007,29(1):92-96. s [5]YOSHIDA K,HASHIZURME K,ABIKO S.Zero reaction 图3控制力矩情形 maneuver flight validation with ETS-VII space robot and ex- Fig.3 Control torque of space robot tension to kinematically redundant arm C//Proceedings of 由图1看出,实际轨迹能够在2s时准确跟踪 the IEEE International Conference on Robotics and Automa- 期望轨迹,且整个控制过程所需控制力矩不大.由图 tion.Piscataway,USA,2001:441-446. 2中可以看出,经过初期学习,神经网络在不到28 [6]CHEN Li.Adaptive and robust composite control of coordi-