正在加载图片...
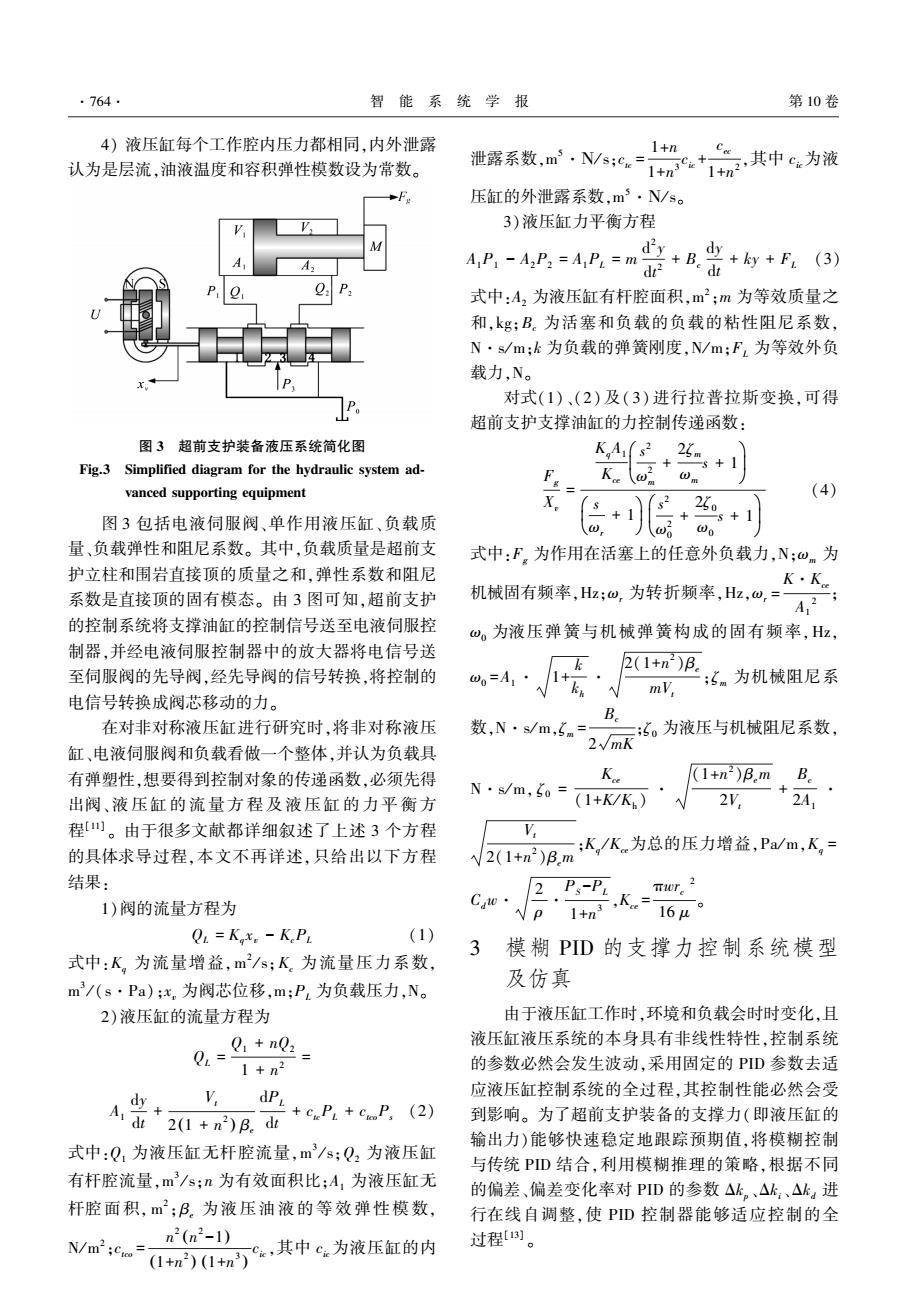
·764 智能系统学报 第10卷 4)液压缸每个工作腔内压力都相同,内外泄露 1+n 认为是层流,油液温度和容积弹性模数设为常数。 泄露系数,m.N/s;c=c+,其中c为液 F 压缸的外泄露系数,m3·N/s。 3)液压缸力平衡方程 d'y. A A P -A2P2=A P.=m 2+B比+ky+F:(3) dt 0, P 式中:A2为液压缸有杆腔面积,m2;m为等效质量之 和,kg:B。为活塞和负载的负载的粘性阻尼系数, N·s/m:k为负载的弹簧刚度,N/m:F,为等效外负 载力,N。 对式(1)、(2)及(3)进行拉普拉斯变换,可得 超前支护支撑油缸的力控制传递函数: 图3超前支护装备液压系统简化图 Fig.3 Simplified diagram for the hydraulic system ad- s+1 F (m vanced supporting equipment (4) 22g0 图3包括电液伺服阀、单作用液压缸、负载质 量、负载弹性和阻尼系数。其中,负载质量是超前支 式中:F。为作用在活塞上的任意外负载力,N;ωm为 护立柱和围岩直接顶的质量之和,弹性系数和阻尼 K·Ke 系数是直接顶的固有模态。由3图可知,超前支护 机械固有频率,Hzω,为转折频率,Hz,ω,= 的控制系统将支撑油缸的控制信号送至电液伺服控 w。为液压弹簧与机械弹簧构成的固有频率,Hz, 制器,并经电液伺服控制器中的放大器将电信号送 k 2(1+n2)B. 至伺服阀的先导阀,经先导阀的信号转换,将控制的 w0=A1· ;m为机械阻尼系 mV, 电信号转换成阀芯移动的力。 B 在对非对称液压缸进行研究时,将非对称液压 数,N·s/m,m= 5。为液压与机械阻尼系数, 2√mK 缸、电液伺服阀和负载看做一个整体,并认为负载具 有弹塑性,想要得到控制对象的传递函数,必须先得 K 1+n2)B.mB. N·s/m,0= 出阀、液压缸的流量方程及液压缸的力平衡方 (1+K/K) 2V. 2A1 程)。由于很多文献都详细叙述了上述3个方程 的具体求导过程,本文不再详述,只给出以下方程 √2(1+n2)B.m ;K,/K为总的压力增益,Pa/m,K,= 结果: 2 Ps-PL =T。2 1)阀的流量方程为 Cao· 1+n3,K 164 Q=Kx K.PL (1) 3 模糊PID的支撑力控制系统模型 式中:K,为流量增益,m/s;K。为流量压力系数, m3/(s·Pa);x,为阀芯位移,m;P,为负载压力,N。 及仿真 2)液压缸的流量方程为 由于液压缸工作时,环境和负载会时时变化,且 0:=2+n0 液压缸液压系统的本身具有非线性特性,控制系统 1+n2 的参数必然会发生波动,采用固定的PD参数去适 V dP 应液压缸控制系统的全过程,其控制性能必然会受 ,+cPL+cmP,(2) dt 2(1 +n2)B.dt 到影响。为了超前支护装备的支撑力(即液压缸的 输出力)能够快速稳定地跟踪预期值,将模糊控制 式中:Q,为液压缸无杆腔流量,m3/s;Q2为液压缸 与传统PD结合,利用模糊推理的策略,根据不同 有杆腔流量,m3/s;n为有效面积比;A,为液压缸无 的偏差、偏差变化率对PID的参数△k。、△k:、△k.进 杆腔面积,m2;B。为液压油液的等效弹性模数, 行在线自调整,使PID控制器能够适应控制的全 N/mic= 1+n)1+n。,其中c,为液压缸的内 n2(n2-1) 过程。4) 液压缸每个工作腔内压力都相同,内外泄露 认为是层流,油液温度和容积弹性模数设为常数。 图 3 超前支护装备液压系统简化图 Fig.3 Simplified diagram for the hydraulic system ad⁃ vanced supporting equipment 图 3 包括电液伺服阀、单作用液压缸、负载质 量、负载弹性和阻尼系数。 其中,负载质量是超前支 护立柱和围岩直接顶的质量之和,弹性系数和阻尼 系数是直接顶的固有模态。 由 3 图可知,超前支护 的控制系统将支撑油缸的控制信号送至电液伺服控 制器,并经电液伺服控制器中的放大器将电信号送 至伺服阀的先导阀,经先导阀的信号转换,将控制的 电信号转换成阀芯移动的力。 在对非对称液压缸进行研究时,将非对称液压 缸、电液伺服阀和负载看做一个整体,并认为负载具 有弹塑性,想要得到控制对象的传递函数,必须先得 出阀、液 压 缸 的 流 量 方 程 及 液 压 缸 的 力 平 衡 方 程[11] 。 由于很多文献都详细叙述了上述 3 个方程 的具体求导过程,本文不再详述,只给出以下方程 结果: 1)阀的流量方程为 QL = Kq xv - KcPL (1) 式中:Kq 为流量增益,m 2 / s;Kc 为流量压力系数, m 3 / (s·Pa);xv 为阀芯位移,m;PL 为负载压力,N。 2)液压缸的流量方程为 QL = Q1 + nQ2 1 + n 2 = A1 dy dt + Vt 2 1 + n 2 ( ) βe dPL dt + ctcPL + ctcoPs (2) 式中:Q1 为液压缸无杆腔流量,m 3 / s;Q2 为液压缸 有杆腔流量,m 3 / s;n 为有效面积比;A1 为液压缸无 杆腔面积, m 2 ; βe 为液压油液的等效弹性模数, N/ m 2 ;ctco = n 2 n 2 ( -1) 1+n 2 ( ) 1+n 3 ( ) cic,其中 cic为液压缸的内 泄露系数,m 5·Ν/ s;ctc = 1+n 1+n 3 cic + cec 1+n 2 ,其中 cic为液 压缸的外泄露系数,m 5·Ν/ s。 3)液压缸力平衡方程 A1P1 - A2P2 = A1PL = m d 2 y dt 2 + Bc dy dt + ky + FL (3) 式中:A2 为液压缸有杆腔面积,m 2 ;m 为等效质量之 和,kg;Bc 为活塞和负载的负载的粘性阻尼系数, N·s/ m;k 为负载的弹簧刚度,N/ m;FL 为等效外负 载力,N。 对式(1)、(2) 及(3) 进行拉普拉斯变换,可得 超前支护支撑油缸的力控制传递函数: Fg Xv = KqA1 Kce s 2 ω 2 m + 2ζm ωm s + 1 æ è ç ö ø ÷ s ωr + 1 æ è ç ö ø ÷ s 2 ω 2 0 + 2ζ0 ω0 s + 1 æ è ç ö ø ÷ (4) 式中:Fg 为作用在活塞上的任意外负载力,N;ωm 为 机械固有频率,Hz;ωr 为转折频率,Hz,ωr = K·Kce A1 2 ; ω0 为液压弹簧与机械弹簧构成的固有频率,Hz, ω0 = A1· 1+ k kh · 2(1+n 2 )βe mVt ;ζm 为机械阻尼系 数,N·s/ m,ζm = Bc 2 mK ;ζ0 为液压与机械阻尼系数, N·s/ m, ζ0 = Kce (1+K / Kh ) · (1+n 2 )βem 2Vt + Bc 2A1 · Vt 2(1+n 2 )βem ;Kq / Kce为总的压力增益,Pa / m,Kq = Cdw· 2 ρ · PS -PL 1+n 3 ,Kce = πwrc 2 16 μ 。 3 模糊 PID 的支撑力控制系统模型 及仿真 由于液压缸工作时,环境和负载会时时变化,且 液压缸液压系统的本身具有非线性特性,控制系统 的参数必然会发生波动,采用固定的 PID 参数去适 应液压缸控制系统的全过程,其控制性能必然会受 到影响。 为了超前支护装备的支撑力(即液压缸的 输出力)能够快速稳定地跟踪预期值,将模糊控制 与传统 PID 结合,利用模糊推理的策略,根据不同 的偏差、偏差变化率对 PID 的参数 Δkp、Δki、Δkd 进 行在线自调整,使 PID 控制器能够适应控制的全 过程[13] 。 ·764· 智 能 系 统 学 报 第 10 卷