正在加载图片...
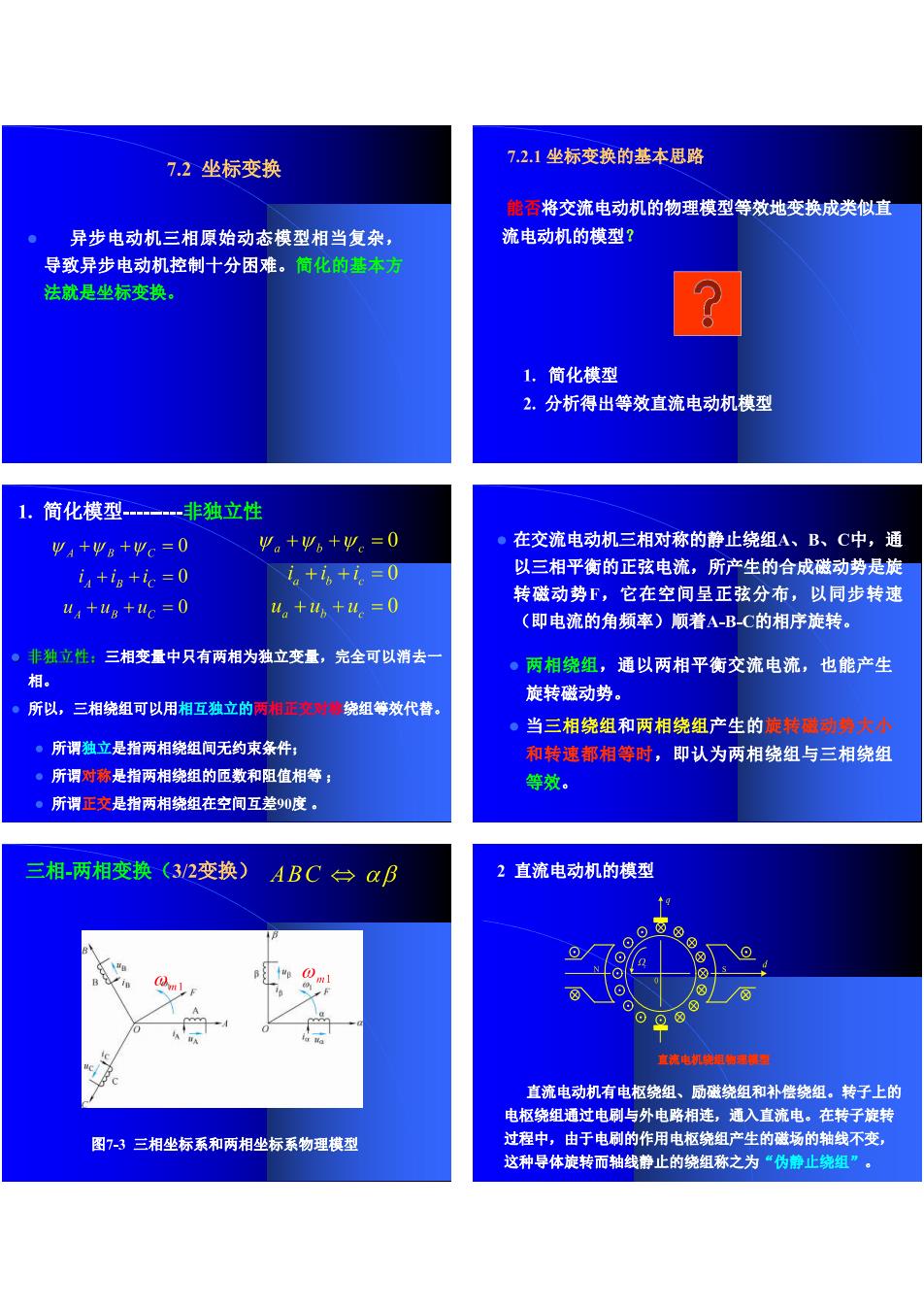
72坐标变换 72.1坐标变换的基本思路 能香将交流电动机的物理模型等效地变换成类似直 异步电动机三相原始动态模型相当复杂, 流电动机的模型? 导致异步电动机控制十分困难。简化的基本方 法就是坐标变换。 1.简化模型 2.分析得出等效直流电动机模型 1.简化模型一-非独立性 ",+9。+Ψc=0 9。+9。+Ψ。=0 在交流电动机三相对称的静止绕组A、B、C中,通 i+is +ic=0 。+%+。=0 以三相平衡的正弦电流,所产生的合成磁动势是旋 +g+4e=0 。+a+4=0 转磁动势F,它在空间呈正弦分布,以同步转速 (即电流的角频率)顺着A-B-C的相序旋转。 。非独立性:三相变量中只有两相为独立变量,完全可以消去一 。两相绕组,通以两相平衡交流电流,也能产生 相。 旋转磁动势。 所以,三相绕组可以用相互独立的 信正交时修绕组等效代替 。当三相绕组和两相绕组产生的旋特圈动静大术 。所谓独立是指两相绕组间无约束条件: 和转速都相等时,即认为两相绕组与三相绕组 。所谓对称是指两相绕组的匝数和阻值相等: 等效。 。所谓正交是指两相绕组在空间互差90度。 三相-两相变换(3/2变换) ABC台aB 2直流电动机的模型 直流电动机有电枢绕组、励磁绕组和补偿绕组,转子上的 电枢绕组通过电刷与外电略相连,通入直流电。在转子旋转 图7-3三相坐标系和两相坐标系物理模型 由。 由于电刷的, 用电 绕组产生 的磁场的 不 这种号体旋转而 浅静止的 称之为“伪静