正在加载图片...
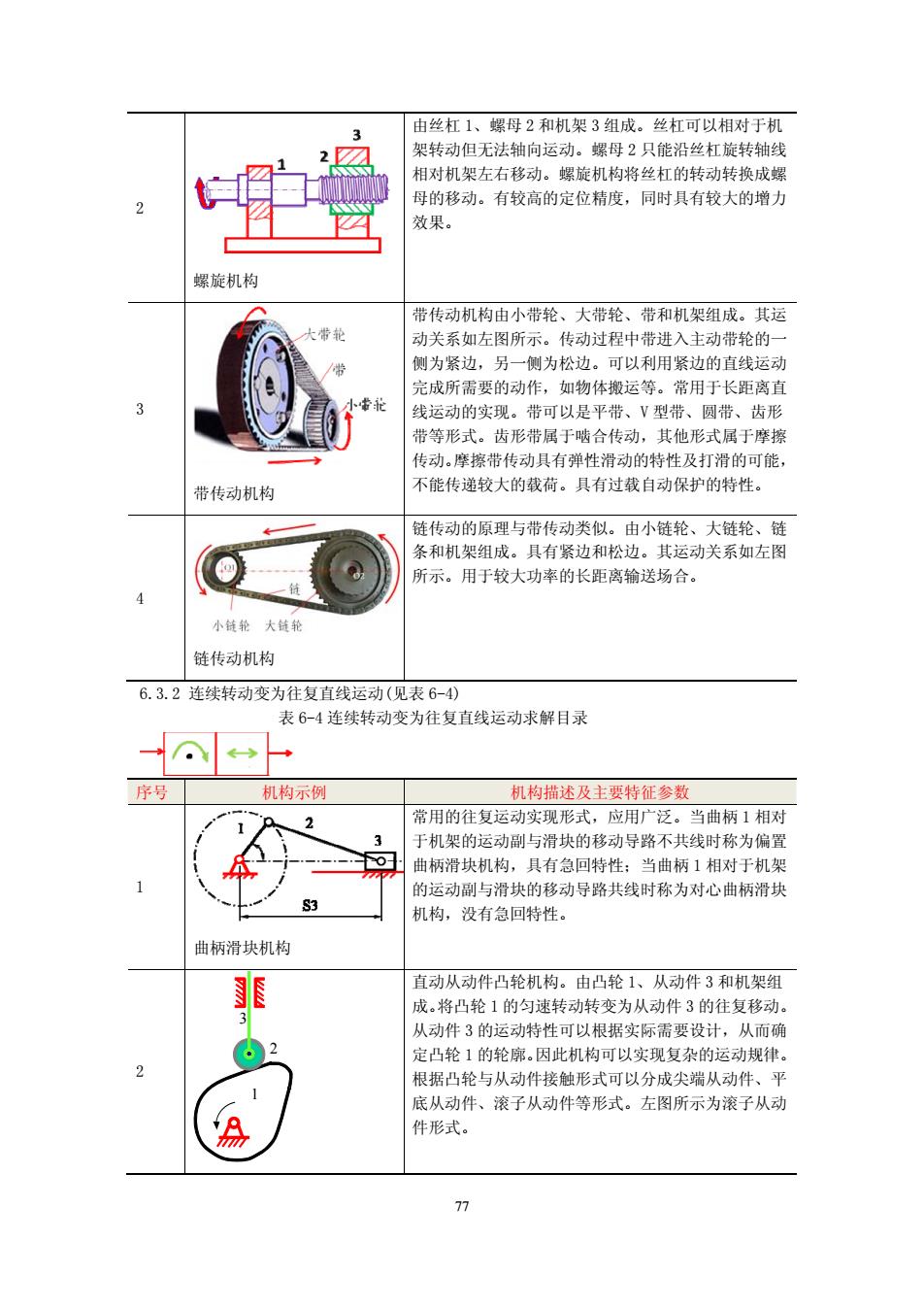
由丝杠1、螺母2和机架3组成。丝杠可以相对于机 2☑ 架转动但无法轴向运动。螺母2只能沿丝杠旋转轴线 相对机架左右移动。螺旋机构将丝杠的转动转换成螺 母的移动。有较高的定位精度,同时具有较大的增力 效果。 螺旋机构 带传动机构由小带轮、大带轮、带和机架组成。其运 动关系如左图所示。传动过程中带进入主动带轮的一 带 侧为紧边,另一侧为松边。可以利用紧边的直线运动 完成所需要的动作,如物体搬运等。常用于长距离直 线运动的实现。带可以是平带、V型带、圆带、齿形 带等形式。齿形带属于啮合传动,其他形式属于摩擦 传动。摩擦带传动具有弹性滑动的特性及打滑的可能, 带传动机构 不能传递较大的载荷。具有过载自动保护的特性。 链传动的原理与带传动类似。由小链轮、大链轮、链 条和机架组成。具有紧边和松边。其运动关系如左图 所示。用于较大功率的长距离输送场合。 小链轮大链轮 链传动机构 6.3.2连续转动变为往复直线运动(见表6-4) 表6-4连续转动变为往复直线运动求解目录 序号 机构示例 机构描述及主要特征参数 2 常用的往复运动实现形式,应用广泛。当曲柄1相对 于机架的运动副与滑块的移动导路不共线时称为偏置 曲柄滑块机构,具有急回特性:当曲柄1相对于机架 的运动副与滑块的移动导路共线时称为对心曲柄滑块 机构,没有急回特性。 曲柄滑块机构 直动从动件凸轮机构。由凸轮1、从动件3和机架组 成。将凸轮1的匀速转动转变为从动件3的往复移动。 从动件3的运动特性可以根据实际需要设计,从而确 定凸轮1的轮廓。因此机构可以实现复杂的运动规律。 根据凸轮与从动件接触形式可以分成尖端从动件、平 底从动件、滚子从动件等形式。左图所示为滚子从动 件形式。 7777 2 螺旋机构 由丝杠 1、螺母 2 和机架 3 组成。丝杠可以相对于机 架转动但无法轴向运动。螺母 2 只能沿丝杠旋转轴线 相对机架左右移动。螺旋机构将丝杠的转动转换成螺 母的移动。有较高的定位精度,同时具有较大的增力 效果。 3 带传动机构 带传动机构由小带轮、大带轮、带和机架组成。其运 动关系如左图所示。传动过程中带进入主动带轮的一 侧为紧边,另一侧为松边。可以利用紧边的直线运动 完成所需要的动作,如物体搬运等。常用于长距离直 线运动的实现。带可以是平带、V 型带、圆带、齿形 带等形式。齿形带属于啮合传动,其他形式属于摩擦 传动。摩擦带传动具有弹性滑动的特性及打滑的可能, 不能传递较大的载荷。具有过载自动保护的特性。 4 链传动机构 链传动的原理与带传动类似。由小链轮、大链轮、链 条和机架组成。具有紧边和松边。其运动关系如左图 所示。用于较大功率的长距离输送场合。 6.3.2 连续转动变为往复直线运动(见表 6-4) 表 6-4 连续转动变为往复直线运动求解目录 序号 机构示例 机构描述及主要特征参数 1 曲柄滑块机构 常用的往复运动实现形式,应用广泛。当曲柄 1 相对 于机架的运动副与滑块的移动导路不共线时称为偏置 曲柄滑块机构,具有急回特性;当曲柄 1 相对于机架 的运动副与滑块的移动导路共线时称为对心曲柄滑块 机构,没有急回特性。 2 1 2 3 直动从动件凸轮机构。由凸轮 1、从动件 3 和机架组 成。将凸轮 1 的匀速转动转变为从动件 3 的往复移动。 从动件 3 的运动特性可以根据实际需要设计,从而确 定凸轮 1 的轮廓。因此机构可以实现复杂的运动规律。 根据凸轮与从动件接触形式可以分成尖端从动件、平 底从动件、滚子从动件等形式。左图所示为滚子从动 件形式