正在加载图片...
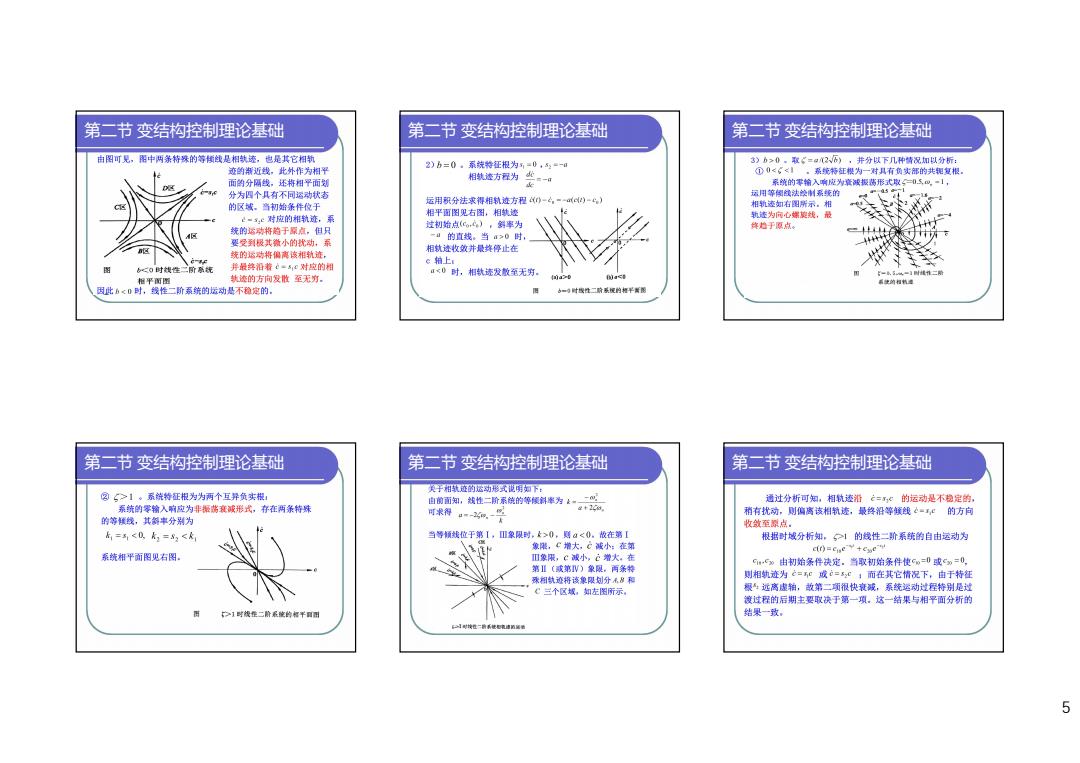
第二节变结构控制理论基础 第二节变结构控制理论基础 第二节变结构控制理论基础 由图可见,图中两杀特森的等横线是相轨迹,也是其它相轨 迹的晰近线,此外作为相平 2)乃=0。系辣特狂根为写=0,52=-日 3)b>0。取=a2、),并分以下几种情况知以分析: 面的分隔线。还将相平面划 相跳迹方程为空。口 ①0<6<!。系统特枉樱为一对具有负实部的共钜复根 系筑的零输入响成为章诚振药形式取=0S四,一1, 分为四个具有不同运动状老 远用等衡战法饶制系统的 运用积分法求得相轨迹方程(一心,=-)一4) 的区域。当初始条件位于 相机麦有可名图精示。相 相平面图见右图,相峡迹 正=3心对应的相轨迹,系 轨连为向心蝶旋线,最 过制始点(C,心),斜率为 统的运动将简于原点,但只 终趋于原点。 ”1的直线。当>0时 要受到极其微小的状动,系 相林迹收敛并最蜂停止在 统的运动将偏离该相轨迹, c轴上: <0时线性二阶系统 并最锌沿着心·5和对应的相 “<0时,相轨迹发散至无穷。 轨迹的方向爱收至无穷。 0a2-0 相平面图 属使的相机通 因此6《0时,线性二阶系筑的坛动悬不稳定的。 ■4时叶线性二阶系促的相平离 第二节变结构控制理论基础 第二节变结构控制理论基础 第二节变结构控制理论基础 子相载迹的远动地式追用知下: ②>1。系饶特征根为为两个互异负实根」 通过分折可知,相轨迹沿亡=心的运动是不稳定的, 系筑的零输入响应为非振荡衰或形式,存在两条特殊 由前面知,线性二阶系能的等候斜率为上。二心 可求得。0-受 ¥+248 稍有扰动,则偏离该相轨迹,最终沿等镶线一,:的方向 的等横线,其解率分别为 收敛至源点。 k1=51<0k1=82<k 当等领线位于第1,正象限时,k>0,则a<0。板在第I 根据时域分析知。>1的线性二阶系统的自由运动为 象限,增大,C诚小:在第 c(r)=cme+ewe 系统相平面图见右图。 D象限,C诚小,正增大。在 Gm”由初始条件决定。当取初始条件使C=0或0=0, 第Ⅱ(或第V)象限,两条转 骤相轨迹将该象限划分:品和 则相轨迹为=和或=5,C:而在其它情况下,由于特在 C三个区规,如左图所示, 极:远高虚轴,故第二项很快衰减,系统运动过程特别是过 渡过程的后期主要取决于第一项。这一结集与相平面分析的 >1时线二阶晨的平 结果一致 55 第二节 变结构控制理论基础 第二节 变结构控制理论基础 第二节 变结构控制理论基础 第二节 变结构控制理论基础 第二节 变结构控制理论基础 第二节 变结构控制理论基础