正在加载图片...
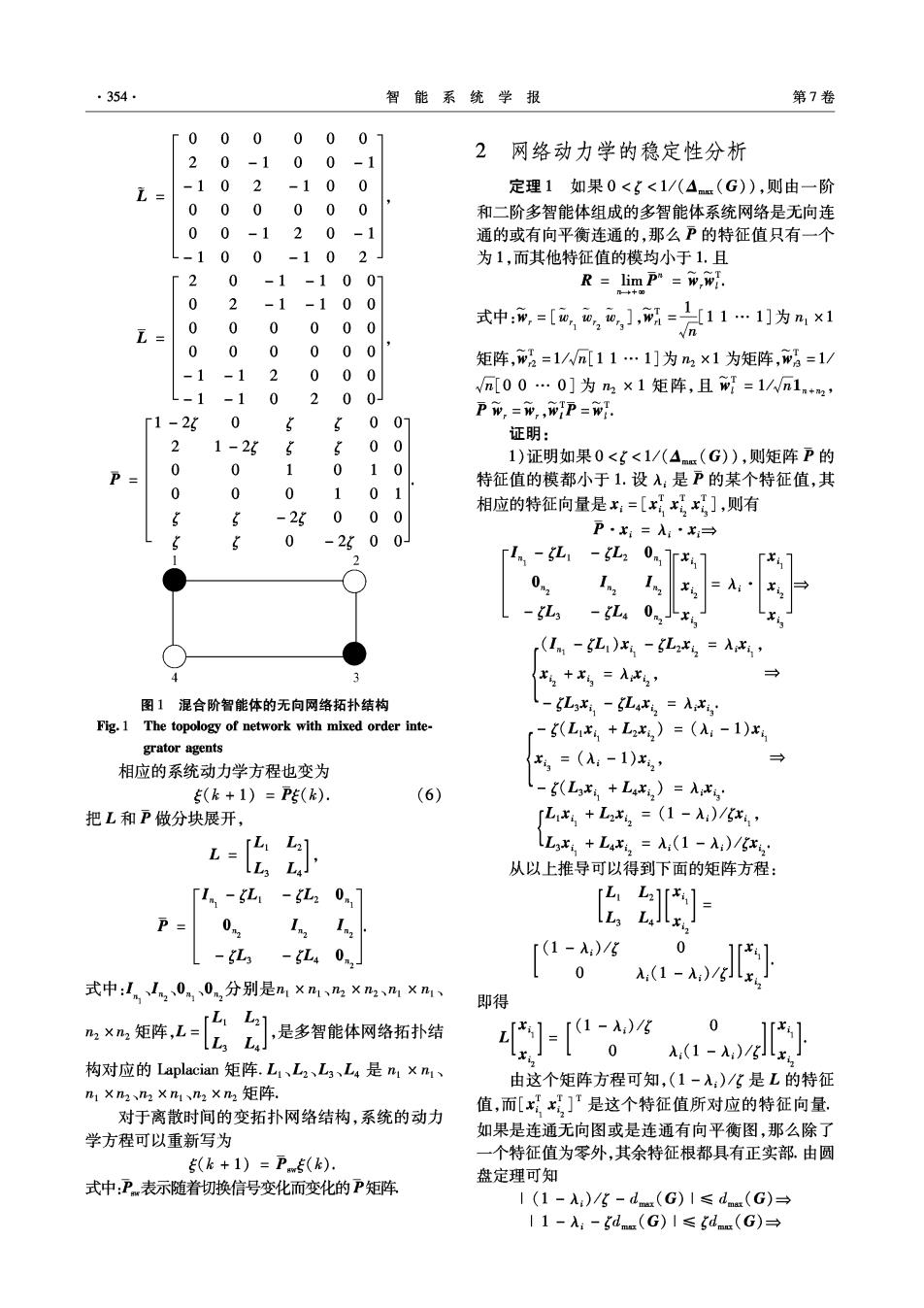
·354 智能系统学报 第7卷 Γ000 00 0 2 20-1 0 网络动力学的稳定性分析 0 -1 L= -10 2 -10 0 定理1如果0<(<1/(4m=(G)),则由一阶 00 0 00 0 和二阶多智能体组成的多智能体系统网络是无向连 00-12 0-1 通的或有向平衡连通的,那么P的特征值只有一个 L-10 0 -102 为1,而其他特征值的模均小于1.且 「2 0 -1 -1007 R lim p=w,w. 0 2 -1 -1 00 L= 0 0 0 00 式中:m,=[西,,0,],m=11…1]为mx1 n 0 0 0 00 矩阵,w2=1/Wn11…1]为n2×1为矩阵,w3=1/ 2 0 00 0 200」 √nm[00…0]为n×1矩阵,且w好=1/Wn1+2, Pw.-w,wiP-Wl. -21 5007 证明: 2 -25 00 1)证明如果0<<1/(4m=(G),则矩阵P的 010 特征值的模都小于1.设入:是P的某个特征值,其 0 0 0 1 01 -25 000 相应的特征向量是x:=[号],则有 0 -2g00J P·x:=入:x→ --sL -L2 0. =x -L3 -L40。. (1-L1)x3-gL22=入, 2+=与 图1混合阶智能体的无向网络拓扑结构 -L,-L4x,=A Fig.1 The topology of network with mixed order inte- -(Lx+L2x,)=(入-1)x grator agents 相应的系统动力学方程也变为 =(入:-1)x, (k+1)=P(k). (6) -(Lx+L4x,)= 把L和P做分块展开, rL+L2=(1-)/54, 「L1L21 lL3x+L4,=入(1-入)/g 从以上推导可以得到下面的矩阵方程: 「-L 吃 -L3 -L40n (1-:)/ 0 0 AMaA4 式中:L,0,0n分别是m1×nn×n2n×1 即得 L L2] ,×m矩阵,L=乙,],是多智能体网络拓扑结 4-[A2 0 构对应的Laplacian矩阵.L1、L2、L3、L4是m1×n1、 由这个矩阵方程可知,(1-入:)/化是L的特征 n1Xn2、n2Xn1、n2×n2矩阵. 对于离散时间的变拓扑网络结构,系统的动力 值,而[xx]”是这个特征值所对应的特征向量. 学方程可以重新写为 如果是连通无向图或是连通有向平衡图,那么除了 一个特征值为零外,其余特征根都具有正实部.由圆 5(k+1)=P(k). 盘定理可知 式中:P表示随着切换信号变化而变化的P矩阵 |(1-入:)/g-dm(G)1≤dnm(G)→ l1-入:-gdmm(G)1≤dmm(G)→