正在加载图片...
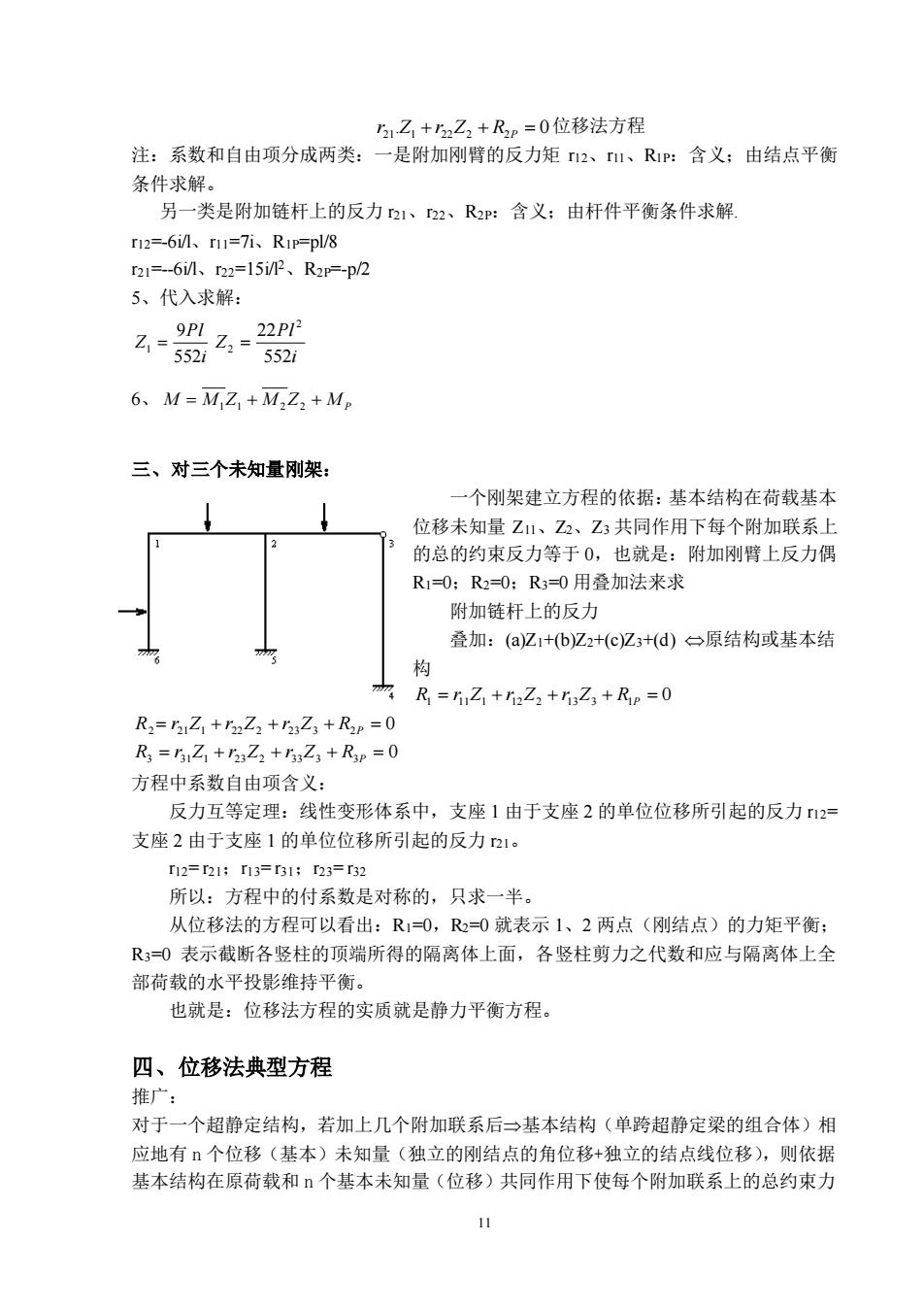
21乙+22Z3+Rp=0位移法方程 注:系数和自由项分成两类:一是附加刚臂的反力矩2、1、RP:含义:由结点平衡 条件求解。 另一类是附加链杆上的反力21、22、R2P:含义;由杆件平衡条件求解。 rI2=-6iM、11=7i、R1=pl/8 r21=.-6iM、r22=15iP、R2p=-p/2 5、代入求解: 6、M=M,Z,+MZ2+Mp 三、对三个未知量利架: 一个刚架建立方程的依据:基本结构在荷载基本 位移未知量Z11、Z2、Z3共同作用下每个附加联系上 的总的约束反力等于0,也就是:附加刚臂上反力偶 R1-0:R2-0:R3=-0用叠加法来求 附加链杆上的反力 叠加:(aZ1+b)Z2+(c)Z3+(d)台原结构或基本结 构 R=+++Rie=0 R2=5Z,+r22Z2+5Z3+R2p=0 R3=31Z+53Z2+53Z3+Rp=0 方程中系数自由项含义: 反力互等定理:线性变形体系中,支座1由于支座2的单位位移所引起的反力2= 支座2由于支座1的单位位移所引起的反力21。 r12=r21:r13=r31:r23=r32 所以:方程中的付系数是对称的,只求一半。 从位移法的方程可以看出:R1=O,R2=0就表示1、2两点(刚结点)的力矩平衡: R3=0表示截断各竖柱的顶端所得的隔离体上面,各竖柱剪力之代数和应与隔离体上全 部荷载的水平投影维持平衡。 也就是:位移法方程的实质就是静力平衡方程。 四、位移法典型方程 推广: 对于一个超静定结构,若加上几个附加联系后一基本结构(单跨超静定梁的组合体)相 应地有个位移(基本)未知量(独立的刚结点的角位移+独立的结点线位移),则依据 基本结构在原荷载和个基本未知量(位移)共同作用下使每个附加联系上的总约束力 11 11 r21.Z1 + r22Z2 + R2P = 0 位移法方程 注:系数和自由项分成两类:一是附加刚臂的反力矩 r12、r11、R1P:含义;由结点平衡 条件求解。 另一类是附加链杆上的反力 r21、r22、R2P:含义;由杆件平衡条件求解. r12=-6i/l、r11=7i、R1P=pl/8 r21=-6i/l、r22=15i/l2、R2P=-p/2 5、代入求解: i Pl Z 552 9 1 = i Pl Z 552 22 2 2 = 6、 M = M1Z1 + M 2Z2 + M P 三、对三个未知量刚架: 一个刚架建立方程的依据:基本结构在荷载基本 位移未知量 Z11、Z2、Z3 共同作用下每个附加联系上 的总的约束反力等于 0,也就是:附加刚臂上反力偶 R1=0;R2=0;R3=0 用叠加法来求 附加链杆上的反力 叠加:(a)Z1+(b)Z2+(c)Z3+(d) 原结构或基本结 构 R1 = r11Z1 + r12Z2 + r13Z3 + R1P = 0 R2= r21Z1 + r22Z2 + r23Z3 + R2P = 0 R3 = r31Z1 + r23Z2 + r33Z3 + R3P = 0 方程中系数自由项含义: 反力互等定理:线性变形体系中,支座 1 由于支座 2 的单位位移所引起的反力 r12= 支座 2 由于支座 1 的单位位移所引起的反力 r21。 r12= r21;r13= r31;r23= r32 所以:方程中的付系数是对称的,只求一半。 从位移法的方程可以看出:R1=0,R2=0 就表示 1、2 两点(刚结点)的力矩平衡; R3=0 表示截断各竖柱的顶端所得的隔离体上面,各竖柱剪力之代数和应与隔离体上全 部荷载的水平投影维持平衡。 也就是:位移法方程的实质就是静力平衡方程。 四、位移法典型方程 推广: 对于一个超静定结构,若加上几个附加联系后基本结构(单跨超静定梁的组合体)相 应地有 n 个位移(基本)未知量(独立的刚结点的角位移+独立的结点线位移),则依据 基本结构在原荷载和 n 个基本未知量(位移)共同作用下使每个附加联系上的总约束力