正在加载图片...
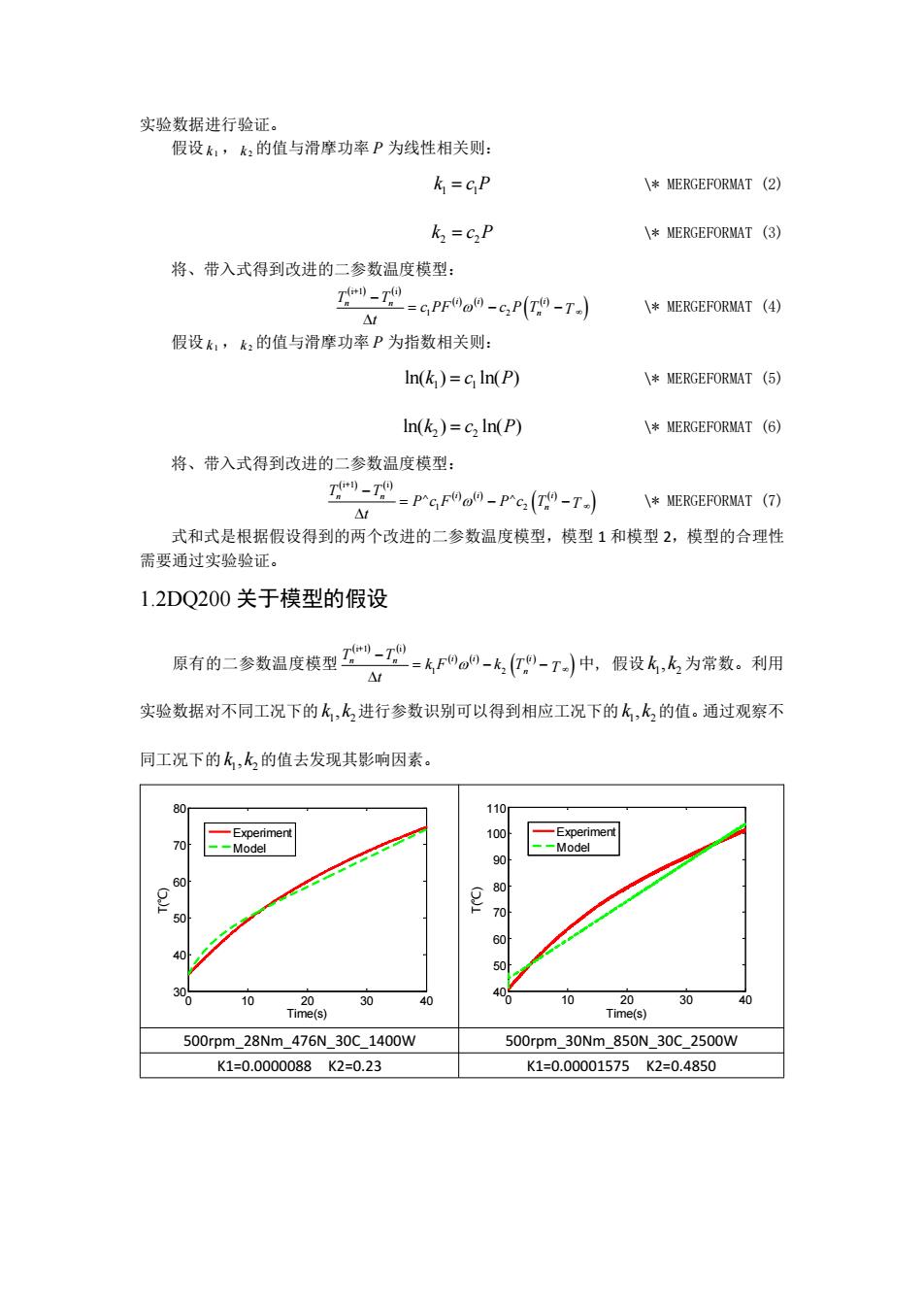
实验数据进行验证。 假设k,k2的值与滑摩功率P为线性相关则: k=cP \MERGEFORMAT (2) k,=C,P \MERGEFORMAT (3) 将、带入式得到改进的二参数温度模型: -70 =cPF0o0-c,P(T9-T) \MERGEFORMAT (4) △t 假设k1,k2的值与滑摩功率P为指数相关则: In(k )=c In(P) \MERGEFORMAT (5) In(k)=c2 In(P) \MERGEFORMAT (6) 将、带入式得到改进的二参数温度模型: 1-TPcFO00-P"c:(T-T) \MERGEFORMAT (7) △t 式和式是根据假设得到的两个改进的二参数温度模型,模型1和模型2,模型的合理性 需要通过实验验证。 1.2DQ200关于模型的假设 原有的二参数温度模型:空-ko-.,的-T中,假设么,k为常数。利用 △ 实验数据对不同工况下的k,k进行参数识别可以得到相应工况下的k,k,的值。通过观察不 同工况下的k,k的值去发现其影响因素。 % 110 -Experiment 100 -Experiment 70 --Model --Model 90 60 g 80 % % SO 0 10 20 30 40 00 10 20 30 40 Time(s) Time(s) 500rpm_28Nm_476N_30C1400W 500rpm_30Nm_850N_30C_2500W K1=0.0000088K2=0.23 K1=0.00001575K2=0.4850实验数据进行验证。 假设 k 1 ,k 2 的值与滑摩功率 P 为线性相关则: 1 1 k c P \* MERGEFORMAT (2) 2 2 k c P \* MERGEFORMAT (3) 将、带入式得到改进的二参数温度模型: i+1 i 1 2 n n i i i n T T c PF c P T T t \* MERGEFORMAT (4) 假设 k 1 ,k 2 的值与滑摩功率 P 为指数相关则: 1 1 ln(k ) c ln(P) \* MERGEFORMAT (5) 2 2 ln(k ) c ln(P) \* MERGEFORMAT (6) 将、带入式得到改进的二参数温度模型: i+1 i 1 2 n n i i i n T T P c F P c T T t \* MERGEFORMAT (7) 式和式是根据假设得到的两个改进的二参数温度模型,模型 1 和模型 2,模型的合理性 需要通过实验验证。 1.2DQ200 关于模型的假设 原有的二参数温度模型 i+1 i 1 2 n n i i i n T T k F k T T t 中, 假设 1 2 k ,k 为常数。利用 实验数据对不同工况下的 1 2 k ,k 进行参数识别可以得到相应工况下的 1 2 k ,k 的值。通过观察不 同工况下的 1 2 k ,k 的值去发现其影响因素。 0 10 20 30 40 30 40 50 60 70 80 Time(s) T(℃) Experiment Model 0 10 20 30 40 40 50 60 70 80 90 100 110 Time(s) T(℃) Experiment Model 500rpm_28Nm_476N_30C_1400W 500rpm_30Nm_850N_30C_2500W K1=0.0000088 K2=0.23 K1=0.00001575 K2=0.4850