正在加载图片...
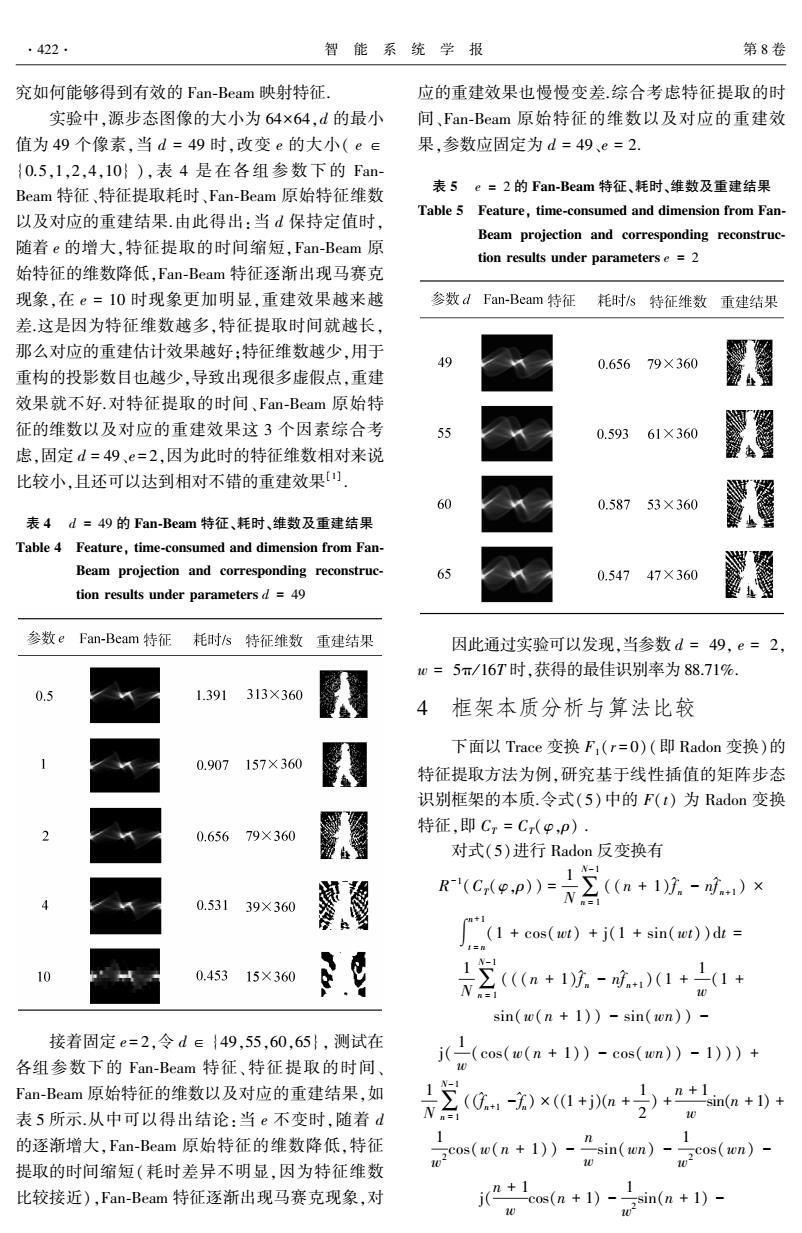
.422. 智能系统学报 第8卷 究如何能够得到有效的Fan-Beam映射特征 应的重建效果也慢慢变差综合考虑特征提取的时 实验中,源步态图像的大小为64×64,d的最小 间、Fan-Beam原始特征的维数以及对应的重建效 值为49个像素,当d=49时,改变e的大小(e∈ 果,参数应固定为d=49、e=2. {0.5,1,2,4,10}),表4是在各组参数下的Fan Beam特征、特征提取耗时、Fan-Beam原始特征维数 表5e=2的Fan-Beam特征、耗时、维数及重建结果 Table 5 Feature,time-consumed and dimension from Fan- 以及对应的重建结果.由此得出:当d保持定值时, Beam projection and corresponding reconstruc- 随着e的增大,特征提取的时间缩短,Fan-Beam原 tion results under parameters e 2 始特征的维数降低,Fan-Beam特征逐渐出现马赛克 现象,在e=10时现象更加明显,重建效果越来越 参数dFan-Beam特征 耗时s特征维数重建结果 差这是因为特征维数越多,特征提取时间就越长, 那么对应的重建估计效果越好:特征维数越少,用于 49 0.65679×360 重构的投影数目也越少,导致出现很多虚假点,重建 效果就不好.对特征提取的时间、Fan-Beam原始特 征的维数以及对应的重建效果这3个因素综合考 0.59361×360 虑,固定d=49、e=2,因为此时的特征维数相对来说 比较小,且还可以达到相对不错的重建效果四 60 0.58753×360 表4d=49的Fan-Beam特征、耗时、维数及重建结果 Table 4 Feature,time-consumed and dimension from Fan- Beam projection and corresponding reconstruc- 65 0.54747×360 tion results under parameters d =49 参数eFan-Beam特征耗时s特征维数 重建结果 因此通过实验可以发现,当参数d=49,e=2, 0=5π/16T时,获得的最佳识别率为88.71%. 0.5 1.391313×360 4框架本质分析与算法比较 下面以Trace变换F,(r=O)(即Radon变换)的 0.907 157×360 特征提取方法为例,研究基于线性插值的矩阵步态 识别框架的本质.令式(5)中的F(t)为Radon变换 0.65679×360 特征,即Cr=C(p,p). 对式(5)进行Radon反变换有 R(CH(.p))= 0.53139×360 恩 N三n+17.-味)× (+cos()+j(+sin())dt= 0.45315×360 三(e以-成1+ sin(w(n+1))-sin(wn))- 接着固定e=2,令d∈{49,55,60,65},测试在 各组参数下的Fan-Beam特征、特征提取的时间、 j((c(w(n+)-co(m1)) Fan-Beam原始特征的维数以及对应的重建结果,如 (-宝)xa+a+++a+D+ 表5所示.从中可以得出结论:当e不变时,随着d N= 的逐渐增大,Fan-Beam原始特征的维数降低,特征 cos(w(n+1))-nsin(wn)-cos(wn)- 提取的时间缩短(耗时差异不明显,因为特征维数 比较接近),Fan-Beam特征逐渐出现马赛克现象,对 *1 os(n+1)-,sin(n+1)- 10究如何能够得到有效的 Fan ̄Beam 映射特征. 实验中ꎬ源步态图像的大小为 64×64ꎬd 的最小 值为 49 个像素ꎬ当 d = 49 时ꎬ改变 e 的大小( e ∈ {0.5ꎬ1ꎬ2ꎬ4ꎬ10} )ꎬ表 4 是在各组参数 下 的 Fan ̄ Beam 特征、特征提取耗时、Fan ̄Beam 原始特征维数 以及对应的重建结果.由此得出:当 d 保持定值时ꎬ 随着 e 的增大ꎬ特征提取的时间缩短ꎬFan ̄Beam 原 始特征的维数降低ꎬFan ̄Beam 特征逐渐出现马赛克 现象ꎬ在 e = 10 时现象更加明显ꎬ重建效果越来越 差.这是因为特征维数越多ꎬ特征提取时间就越长ꎬ 那么对应的重建估计效果越好ꎻ特征维数越少ꎬ用于 重构的投影数目也越少ꎬ导致出现很多虚假点ꎬ重建 效果就不好.对特征提取的时间、Fan ̄Beam 原始特 征的维数以及对应的重建效果这 3 个因素综合考 虑ꎬ固定 d = 49、e = 2ꎬ因为此时的特征维数相对来说 比较小ꎬ且还可以达到相对不错的重建效果[1] . 表 4 d = 49 的 Fan ̄Beam 特征、耗时、维数及重建结果 Table 4 Featureꎬ time ̄consumed and dimension from Fan ̄ Beam projection and corresponding reconstruc ̄ tion results under parameters d = 49 接着固定 e = 2ꎬ令 d ∈ {49ꎬ55ꎬ60ꎬ65}ꎬ 测试在 各组参数下的 Fan ̄Beam 特征、特征提取的时间、 Fan ̄Beam 原始特征的维数以及对应的重建结果ꎬ如 表 5 所示.从中可以得出结论:当 e 不变时ꎬ随着 d 的逐渐增大ꎬFan ̄Beam 原始特征的维数降低ꎬ特征 提取的时间缩短(耗时差异不明显ꎬ因为特征维数 比较接近)ꎬFan ̄Beam 特征逐渐出现马赛克现象ꎬ对 应的重建效果也慢慢变差.综合考虑特征提取的时 间、Fan ̄Beam 原始特征的维数以及对应的重建效 果ꎬ参数应固定为 d = 49、e = 2. 表 5 e = 2 的 Fan ̄Beam 特征、耗时、维数及重建结果 Table 5 Featureꎬ time ̄consumed and dimension from Fan ̄ Beam projection and corresponding reconstruc ̄ tion results under parameters e = 2 因此通过实验可以发现ꎬ当参数 d = 49ꎬ e = 2ꎬ w = 5π/ 16T 时ꎬ获得的最佳识别率为 88.71%. 4 框架本质分析与算法比较 下面以 Trace 变换 F1(r = 0)(即 Radon 变换)的 特征提取方法为例ꎬ研究基于线性插值的矩阵步态 识别框架的本质.令式(5)中的 F(t) 为 Radon 变换 特征ꎬ即 CT = CT(φꎬρ) . 对式(5)进行 Radon 反变换有 R -1 (CT(φꎬρ)) = 1 N∑ N-1 n = 1 ((n + 1) ^ f n - n ^ f n+1 ) × ∫ n+1 t = n (1 + cos(wt) + j(1 + sin(wt))dt = 1 N∑ N-1 n = 1 (((n + 1) ^ f n - n ^ f n+1 )(1 + 1 w (1 + sin(w(n + 1)) - sin(wn)) - j( 1 w (cos(w(n + 1)) - cos(wn)) - 1))) + 1 N∑ N-1 n = 1 (( ^ f n+1 -^ f n) × ((1 + j)(n + 1 2 ) + n + 1 w sin(n + 1) + 1 w 2 cos(w(n + 1)) - n w sin(wn) - 1 w 2 cos(wn) - j( n + 1 w cos(n + 1) - 1 w 2 sin(n + 1) - 422 智 能 系 统 学 报 第 8 卷