正在加载图片...
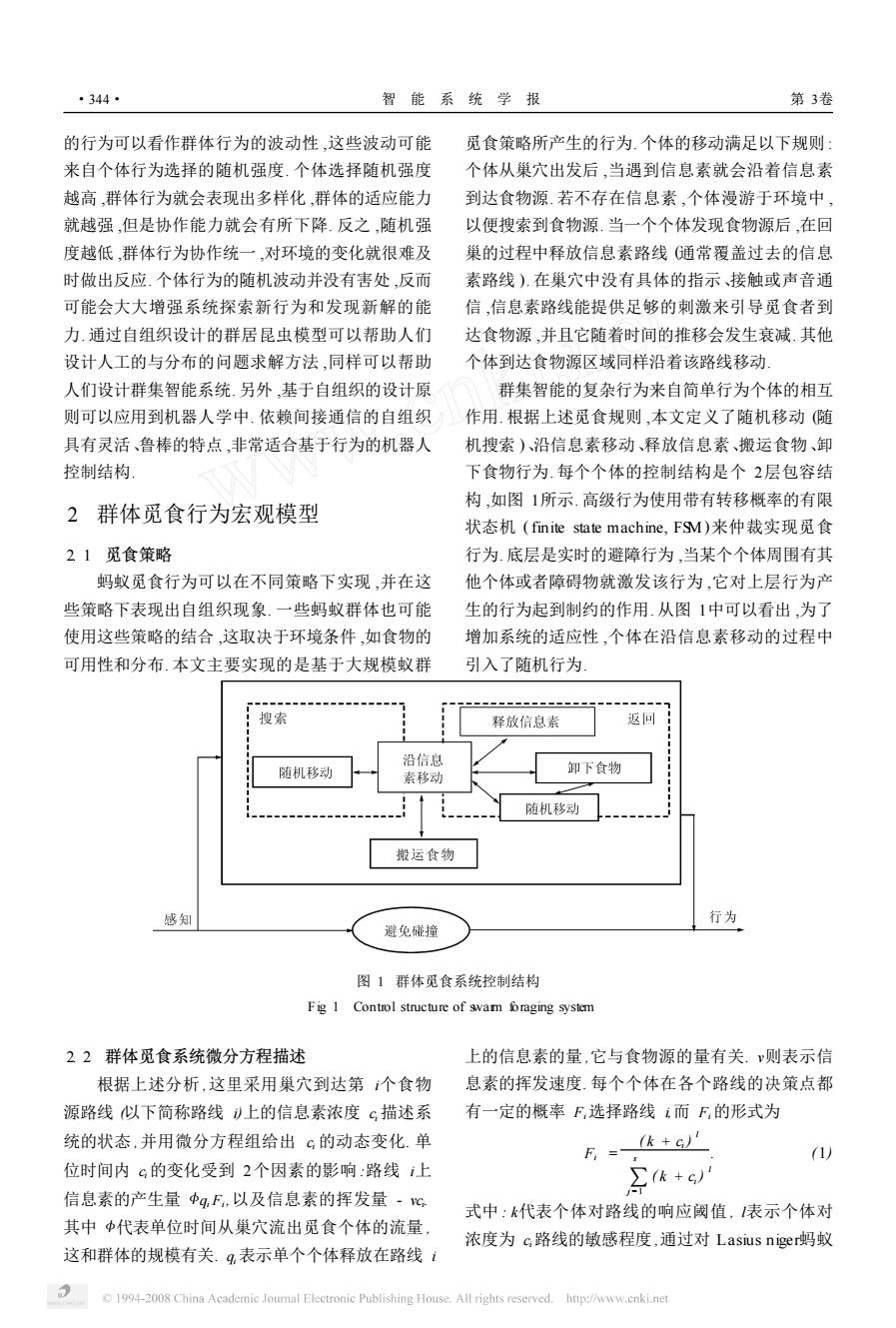
·344… 智能系统学报 第3卷 的行为可以看作群体行为的波动性,这些波动可能 觅食策略所产生的行为.个体的移动满足以下规则: 来自个体行为选择的随机强度.个体选择随机强度 个体从巢穴出发后,当遇到信息素就会沿着信息素 越高,群体行为就会表现出多样化,群体的适应能力 到达食物源.若不存在信息素,个体漫游于环境中 就越强,但是协作能力就会有所下降.反之,随机强 以便搜索到食物源.当一个个体发现食物源后,在回 度越低,群体行为协作统一,对环境的变化就很难及 巢的过程中释放信息素路线G通常覆盖过去的信息 时做出反应.个体行为的随机波动并没有害处,反而 素路线).在巢穴中没有具体的指示、接触或声音通 可能会大大增强系统探索新行为和发现新解的能 信,信息素路线能提供足够的刺激来引导觅食者到 力.通过自组织设计的群居昆虫模型可以帮助人们 达食物源,并且它随着时间的推移会发生衰减.其他 设计人工的与分布的问题求解方法,同样可以帮助 个体到达食物源区域同样沿着该路线移动 人们设计群集智能系统.另外,基于自组织的设计原 群集智能的复杂行为来自简单行为个体的相互 则可以应用到机器人学中.依赖间接通信的自组织作用.根据上述觅食规则,本文定义了随机移动(随 具有灵活、鲁棒的特点,非常适合基于行为的机器人 机搜索)、沿信息素移动、释放信息素、搬运食物、卸 控制结构 下食物行为.每个个体的控制结构是个2层包容结 构,如图1所示.高级行为使用带有转移概率的有限 2群体觅食行为宏观模型 状态机(finite state machine,FM)来仲裁实现觅食 21觅食策略 行为.底层是实时的避障行为,当某个个体周围有其 蚂蚁觅食行为可以在不同策略下实现,并在这 他个体或者障碍物就激发该行为,它对上层行为产 些策略下表现出自组织现象.一些蚂蚁群体也可能 生的行为起到制约的作用.从图1中可以看出,为了 使用这些策略的结合,这取决于环境条件,如食物的 增加系统的适应性,个体在沿信息素移动的过程中 可用性和分布.本文主要实现的是基于大规模蚁群 引入了随机行为 搜索 释放信息素 返回 沿信息 随机移动 卸下食物 素移动 随机移动 搬运食物 感知 行为 避免碰撞 图1群体觅食系统控制结构 Fig 1 Control structure of swam oraging system 22群体觅食系统微分方程描述 上的信息素的量,它与食物源的量有关.则表示信 根据上述分析,这里采用巢穴到达第个食物 息素的挥发速度.每个个体在各个路线的决策点都 源路线以下简称路线上的信息素浓度c描述系 有一定的概率F,选择路线i而F,的形式为 统的状态,并用微分方程组给出G的动态变化.单 (k+G)' F=- (1) 位时间内G的变化受到2个因素的影响:路线i上 ∑k+c)1 信息素的产生量中q,F,以及信息素的挥发量-c 式中:k代表个体对路线的响应阈值,表示个体对 其中中代表单位时间从巢穴流出觅食个体的流量, 浓度为c路线的敏感程度,通过对Lasius niger蚂蚁 这和群体的规模有关.q,表示单个个体释放在路线i 1994-2008 China Academic Journal Electronie Publishing House.All rights reserved.http://www.cnki.net的行为可以看作群体行为的波动性 ,这些波动可能 来自个体行为选择的随机强度. 个体选择随机强度 越高 ,群体行为就会表现出多样化 ,群体的适应能力 就越强 ,但是协作能力就会有所下降. 反之 ,随机强 度越低 ,群体行为协作统一 ,对环境的变化就很难及 时做出反应. 个体行为的随机波动并没有害处 ,反而 可能会大大增强系统探索新行为和发现新解的能 力. 通过自组织设计的群居昆虫模型可以帮助人们 设计人工的与分布的问题求解方法 ,同样可以帮助 人们设计群集智能系统. 另外 ,基于自组织的设计原 则可以应用到机器人学中. 依赖间接通信的自组织 具有灵活、鲁棒的特点 ,非常适合基于行为的机器人 控制结构. 2 群体觅食行为宏观模型 2. 1 觅食策略 蚂蚁觅食行为可以在不同策略下实现 ,并在这 些策略下表现出自组织现象. 一些蚂蚁群体也可能 使用这些策略的结合 ,这取决于环境条件 ,如食物的 可用性和分布. 本文主要实现的是基于大规模蚁群 觅食策略所产生的行为. 个体的移动满足以下规则 : 个体从巢穴出发后 ,当遇到信息素就会沿着信息素 到达食物源. 若不存在信息素 ,个体漫游于环境中 , 以便搜索到食物源. 当一个个体发现食物源后 ,在回 巢的过程中释放信息素路线 (通常覆盖过去的信息 素路线 ). 在巢穴中没有具体的指示、接触或声音通 信 ,信息素路线能提供足够的刺激来引导觅食者到 达食物源 ,并且它随着时间的推移会发生衰减. 其他 个体到达食物源区域同样沿着该路线移动. 群集智能的复杂行为来自简单行为个体的相互 作用. 根据上述觅食规则 ,本文定义了随机移动 (随 机搜索 )、沿信息素移动、释放信息素、搬运食物、卸 下食物行为. 每个个体的控制结构是个 2层包容结 构 ,如图 1所示. 高级行为使用带有转移概率的有限 状态机 ( finite state machine, FSM )来仲裁实现觅食 行为. 底层是实时的避障行为 ,当某个个体周围有其 他个体或者障碍物就激发该行为 ,它对上层行为产 生的行为起到制约的作用. 从图 1中可以看出 ,为了 增加系统的适应性 ,个体在沿信息素移动的过程中 引入了随机行为. 图 1 群体觅食系统控制结构 Fig. 1 Control structure of swarm foraging system 2. 2 群体觅食系统微分方程描述 根据上述分析 ,这里采用巢穴到达第 i个食物 源路线 (以下简称路线 i)上的信息素浓度 ci 描述系 统的状态 ,并用微分方程组给出 ci 的动态变化. 单 位时间内 ci 的变化受到 2个因素的影响 :路线 i上 信息素的产生量 <qi Fi ,以及信息素的挥发量 - vci . 其中 <代表单位时间从巢穴流出觅食个体的流量 , 这和群体的规模有关. qi 表示单个个体释放在路线 i 上的信息素的量 ,它与食物源的量有关. v则表示信 息素的挥发速度. 每个个体在各个路线的决策点都 有一定的概率 Fi选择路线 i,而 Fi 的形式为 Fi = ( k + ci ) l ∑ s j=1 ( k + ci ) l . (1) 式中 : k代表个体对路线的响应阈值 , l表示个体对 浓度为 ci 路线的敏感程度 ,通过对 Lasius niger蚂蚁 · 443 · 智 能 系 统 学 报 第 3卷