正在加载图片...
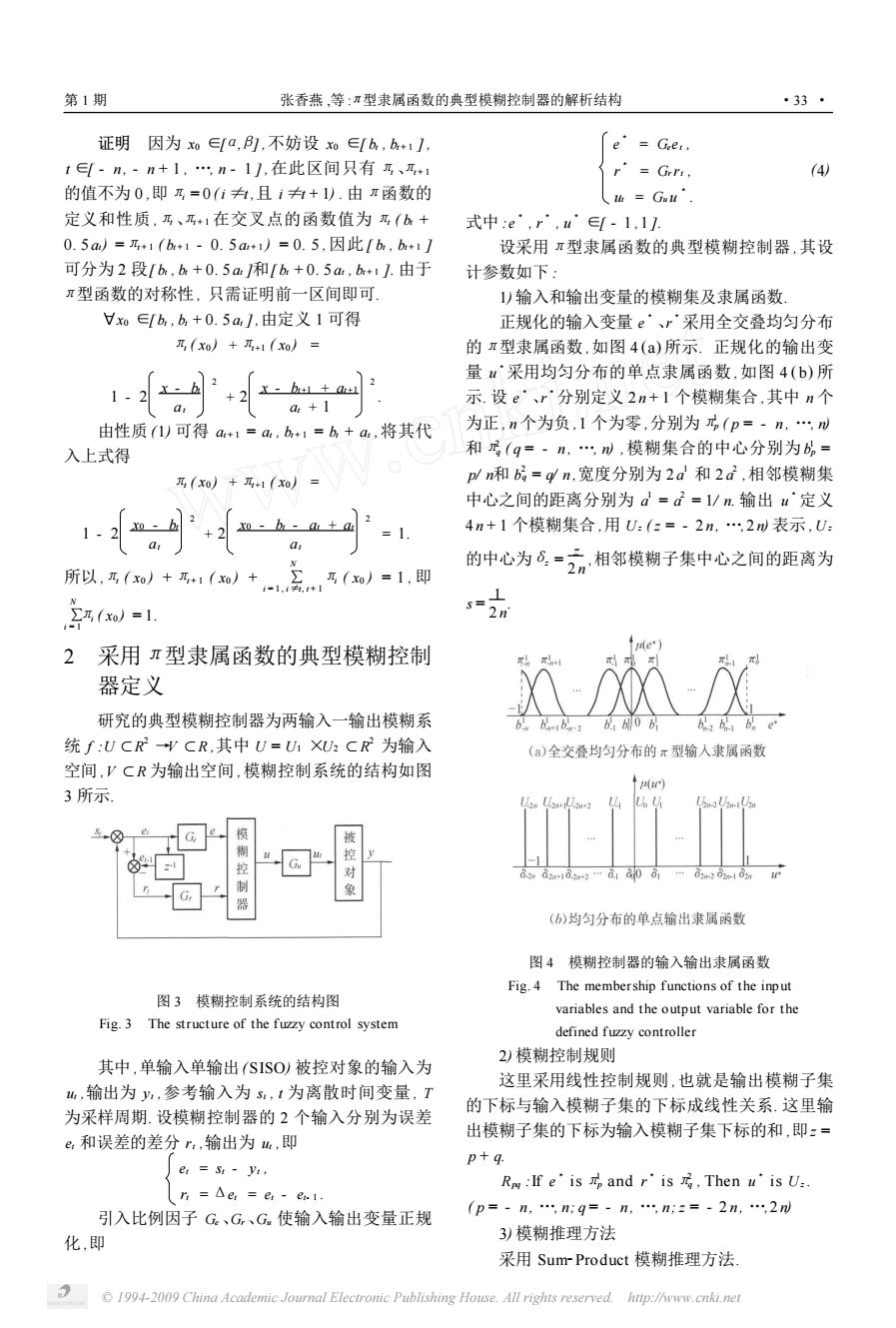
第1期 张香燕,等:π型隶属函数的典型模糊控制器的解析结构 ·33 证明因为0∈(a,],不妨设x0∈(b,b+1], e'=Ger, t∈(-n,-n+1,n-1],在此区间只有乃、r+1 r =Grrt, (4) 的值不为0,即亚,=0(i≠,且i≠+1).由π函数的 u=Guu'. 定义和性质,亚、乃+1在交叉点的函数值为亚(b+ 式中:e`,r`,u∈-1,1] 0.5a=乃+1(b+1-0.5+1)=0.5,因此[b,b+1] 设采用π型隶属函数的典型模糊控制器,其设 可分为2段[b,b+0.5am和[br+0.5a,b+i1.由于 计参数如下: π型函数的对称性,只需证明前一区间即可 1)输入和输出变量的模糊集及隶属函数. x0∈b,b,+0.5a1,由定义1可得 正规化的输入变量e`、r采用全交叠均匀分布 π,(xo)+π+1(x0)= 的π型隶属函数,如图4(a)所示.正规化的输出变 12- 量u采用均匀分布的单点隶属函数,如图4(b)所 示.设e°、r分别定义2n+1个模糊集合,其中n个 a a+1 由性质(1)可得a+1=a,b+1=+a,将其代 为正,n个为负,1个为零,分别为(p=-n,刊 入上式得 和厉(g=-n,…W,模糊集合的中心分别为= π(xo)+乃1(x0)= pn和b品=gn,宽度分别为2d和2d,相邻模糊集 中心之间的距离分别为a=d2=l/n输出u定义 1-2b2 4n+1个模糊集合,用U:(z=-2n,2W表示,U a: 所以,兀(xo)+元+1(xo)+ 1-1.i.t+1 可(x0)=1,即 的中心为8=2n相邻模糊子集中心之间的距离为 之元(xo)=1 s=2n 2 采用π型隶属函数的典型模糊控制 器定义 研究的典型模糊控制器为两输入一输出模糊系 统f:UCRΨCR,其中U=UXU2CR为输入 (a)全交叠均匀分布的π型输人隶属函数 空间,VCR为输出空间,模糊控制系统的结构如图 3所示 ↑4) 6 5, 模 被 G 控 控 对 .dw+13+2+6100102m-102r10m 象 器 (b)均匀分布的单点输出隶属函数 图4模糊控制器的输入输出隶属函数 Fig.4 The membership functions of the input 图3模糊控制系统的结构图 variables and the output variable for the Fig.3 The structure of the fuzzy control system defined fuzzy controller 2)模糊控制规则 其中,单输入单输出(SISO)被控对象的输入为 山,输出为y,参考输入为s,1为离散时间变量,T 这里采用线性控制规则,也就是输出模糊子集 的下标与输入模糊子集的下标成线性关系.这里输 为采样周期.设模糊控制器的2个输入分别为误差 出模糊子集的下标为输入模糊子集下标的和,即:= e和误差的差分r,输出为山,即 p+q. er =S:-yr, R If e'is and r'is.Then u'is U:. r=△e=e-e.1. 引入比例因子G、G,、G.使输入输出变量正规 (p=-n,nq=-n,…,n;z=-2n,…2 化,即 3)模糊推理方法 采用Sum-Product模糊推理方法 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.htp://www.cnki.net证明 因为 x0 ∈[α,β] ,不妨设 x0 ∈[ bt , bt + 1 ] , t ∈[ - n , - n + 1 , …, n - 1 ] ,在此区间只有πt 、πt + 1 的值不为 0 ,即πi = 0 ( i ≠t ,且 i ≠t + 1) . 由π函数的 定义和性质 ,πt 、πt + 1 在交叉点的函数值为πt ( bt + 0. 5 at) =πt + 1 ( bt + 1 - 0. 5 at + 1 ) = 0. 5 ,因此[ bt , bt + 1 ] 可分为 2 段[ bt , bt + 0. 5 at ]和[ bt + 0. 5 at , bt + 1 ]. 由于 π型函数的对称性 , 只需证明前一区间即可. Πx0 ∈[ bt , bt + 0. 5 at ] ,由定义 1 可得 πt ( x0 ) +πt+1 ( x0 ) = 1 - 2 x - bt at 2 + 2 x - bt+1 + at+1 at + 1 2 . 由性质 (1) 可得 at + 1 = at , bt + 1 = bt + at ,将其代 入上式得 πt ( x0 ) +πt+1 ( x0 ) = 1 - 2 x0 - bt at 2 + 2 x0 - bt - at + at at 2 = 1. 所以 ,πt ( x0 ) +πt + 1 ( x0 ) + ∑ N i = 1 , i ≠t , t + 1 πi ( x0 ) = 1 , 即 ∑ N i = 1 πi ( x0 ) = 1. 2 采用π型隶属函数的典型模糊控制 器定义 研究的典型模糊控制器为两输入一输出模糊系 统 f :U < R 2 →V < R ,其中 U = U1 ×U2 < R 2 为输入 空间 ,V < R 为输出空间 ,模糊控制系统的结构如图 3 所示. 图 3 模糊控制系统的结构图 Fig. 3 The structure of the fuzzy control system 其中 ,单输入单输出(SISO) 被控对象的输入为 ut ,输出为 yt ,参考输入为 st , t 为离散时间变量 , T 为采样周期. 设模糊控制器的 2 个输入分别为误差 et 和误差的差分 rt ,输出为 ut ,即 et = st - yt , rt = Δet = et - et- 1 . 引入比例因子 Ge 、Gr 、Gu 使输入输出变量正规 化 ,即 e 3 = Geet , r 3 = Gr rt , ut = Gu u 3 . (4) 式中 :e 3 , r 3 , u 3 ∈[ - 1 ,1 ]. 设采用π型隶属函数的典型模糊控制器 ,其设 计参数如下 : 1) 输入和输出变量的模糊集及隶属函数. 正规化的输入变量 e 3 、r 3 采用全交叠均匀分布 的π型隶属函数 ,如图 4 (a) 所示. 正规化的输出变 量 u 3 采用均匀分布的单点隶属函数 ,如图 4 ( b) 所 示. 设 e 3 、r 3 分别定义 2 n + 1 个模糊集合 ,其中 n 个 为正 , n 个为负 ,1 个为零 ,分别为π1 p ( p = - n , …, n) 和π2 q ( q = - n , …, n) ,模糊集合的中心分别为b 1 p = p/ n和 b 2 q = q/ n ,宽度分别为 2 a 1 和 2 a 2 ,相邻模糊集 中心之间的距离分别为 a 1 = a 2 = 1/ n. 输出 u 3 定义 4 n + 1 个模糊集合 ,用 U z ( z = - 2 n , …,2 n) 表示 , U z 的中心为δz = z 2 n ,相邻模糊子集中心之间的距离为 s = 1 2 n . 图 4 模糊控制器的输入输出隶属函数 Fig. 4 The membership functions of the input variables and the output variable for the defined fuzzy controller 2) 模糊控制规则 这里采用线性控制规则 ,也就是输出模糊子集 的下标与输入模糊子集的下标成线性关系. 这里输 出模糊子集的下标为输入模糊子集下标的和 ,即z = p + q. Rpq :If e 3 isπ1 p and r 3 isπ2 q , Then u 3 is U z . ( p = - n , …, n; q = - n , …, n; z = - 2 n , …,2 n) 3) 模糊推理方法 采用 Sum2Product 模糊推理方法. 第 1 期 张香燕 ,等 :π型隶属函数的典型模糊控制器的解析结构 ·33 · © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net