正在加载图片...
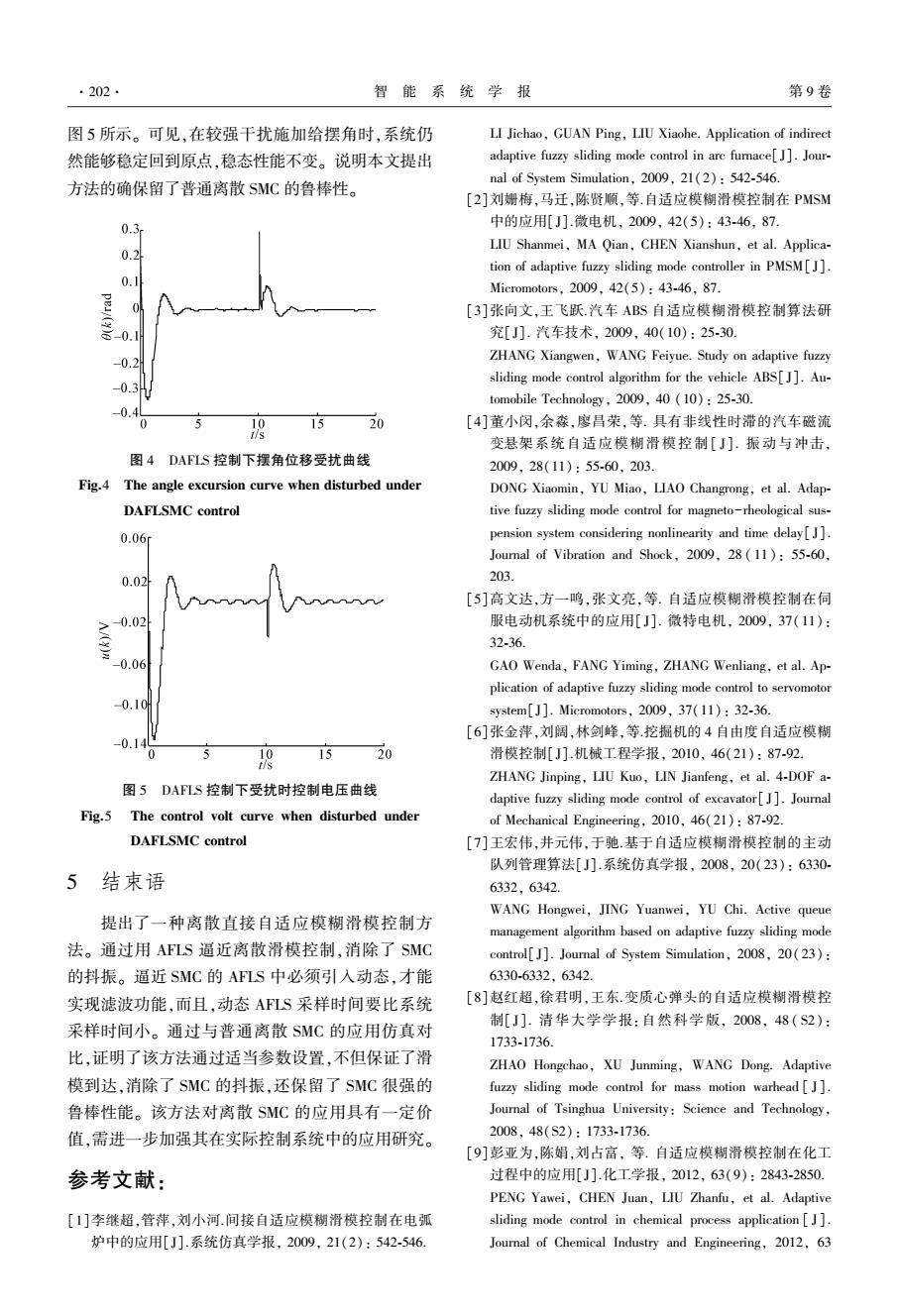
.202 智能系统学报 第9卷 图5所示。可见,在较强干扰施加给摆角时,系统仍 LI Jichao,GUAN Ping,LIU Xiaohe.Application of indirect 然能够稳定回到原,点,稳态性能不变。说明本文提出 adaptive fuzzy sliding mode control in are fumace[J].Jour- 方法的确保留了普通离散SMC的鲁棒性。 nal of System Simulation,2009,21(2):542-546 [2]刘姗梅,马迁,陈贤顺,等.自适应模糊滑模控制在PMSM 0.3 中的应用J].微电机,2009,42(5):43-46,87. 0.2 LIU Shanmei,MA Qian,CHEN Xianshun,et al.Applica- tion of adaptive fuzzy sliding mode controller in PMSM[J]. Micromotors,2009,42(5):43-46,87. 0 [3]张向文,王飞跃.汽车ABS自适应模糊滑模控制算法研 3-0.1 究[J].汽车技术,2009,40(10):25-30. -0.2 ZHANG Xiangwen,WANG Feiyue.Study on adaptive fuzzy sliding mode control algorithm for the vehicle ABS[J].Au- -0.3 tomobile Technology,2009,40(10):25-30. -0. 0 10 15 20 [4]董小闵,余森,廖昌荣,等.具有非线性时滞的汽车磁流 ii 变悬架系统自适应模糊滑模控制[J].振动与冲击, 图4 DAFLS控制下摆角位移受扰曲线 2009,28(11):55-60,203. Fig.4 The angle excursion curve when disturbed under DONG Xiaomin,YU Miao,LIAO Changrong,et al.Adap- DAFLSMC control tive fuzzy sliding mode control for magneto-rheological sus- 0.06 pension system considering nonlinearity and time delay[J]. Journal of Vibration and Shock,2009,28(11):55-60, 0.02 203. 「5]高文达,方一鸣,张文亮,等.自适应模糊滑模控制在伺 -0.02 服电动机系统中的应用].微特电机,2009,37(11): 32.36. -0.06 GAO Wenda,FANG Yiming,ZHANG Wenliang,et al.Ap- plication of adaptive fuzzy sliding mode control to servomotor 0.10 system[J].Micromotors,2009,37(11):32-36. [6]张金萍,刘阔,林剑峰,等.挖掘机的4自由度自适应模糊 0.14 5 8 15 20 滑模控制[J].机械工程学报,2010,46(21):87-92. ZHANG Jinping,LIU Kuo,LIN Jianfeng,et al.4-DOF a- 图5 DAFLS控制下受扰时控制电压曲线 daptive fuzzy sliding mode control of excavator[].Journal Fig.5 The control volt curve when disturbed under of Mechanical Engineering,2010,46(21):87-92. DAFLSMC control [7]王宏伟,井元伟,于驰.基于自适应模糊滑模控制的主动 队列管理算法[J].系统仿真学报,2008,20(23):6330 5结束语 6332,6342. WANG Hongwei,JING Yuanwei,YU Chi.Active queue 提出了一种离散直接自适应模糊滑模控制方 management algorithm based on adaptive fuzzy sliding mode 法。通过用AFLS逼近离散滑模控制,消除了SMC control[J].Journal of System Simulation,2008,20(23): 的抖振。逼近SMC的AFLS中必须引入动态,才能 6330-6332,6342. 实现滤波功能,而且,动态AFLS采样时间要比系统 [8]赵红超,徐君明,王东.变质心弹头的自适应模糊滑模控 制[J].清华大学学报:自然科学版,2008,48(S2): 采样时间小。通过与普通离散SMC的应用仿真对 1733-1736. 比,证明了该方法通过适当参数设置,不但保证了滑 ZHAO Hongchao,XU Junming,WANG Dong.Adaptive 模到达,消除了SMC的抖振,还保留了SMC很强的 fuzzy sliding mode control for mass motion warhead [J]. 鲁棒性能。该方法对离散SMC的应用具有一定价 Journal of Tsinghua University:Science and Technology, 值,需进一步加强其在实际控制系统中的应用研究。 2008,48(S2):1733-1736. [9]彭亚为,陈娟,刘占富,等.自适应模糊滑模控制在化工 参考文献: 过程中的应用[J].化工学报,2012,63(9):2843-2850. PENG Yawei,CHEN Juan,LIU Zhanfu,et al.Adaptive [1]李继超,管萍,刘小河.间接自适应模糊滑模控制在电弧 sliding mode control in chemical process application[J]. 炉中的应用[J].系统仿真学报,2009,21(2):542-546. Journal of Chemical Industry and Engineering,2012,63图 5 所示。 可见,在较强干扰施加给摆角时,系统仍 然能够稳定回到原点,稳态性能不变。 说明本文提出 方法的确保留了普通离散 SMC 的鲁棒性。 图 4 DAFLS 控制下摆角位移受扰曲线 Fig.4 The angle excursion curve when disturbed under DAFLSMC control 图 5 DAFLS 控制下受扰时控制电压曲线 Fig.5 The control volt curve when disturbed under DAFLSMC control 5 结束语 提出了一种离散直接自适应模糊滑模控制方 法。 通过用 AFLS 逼近离散滑模控制,消除了 SMC 的抖振。 逼近 SMC 的 AFLS 中必须引入动态,才能 实现滤波功能,而且,动态 AFLS 采样时间要比系统 采样时间小。 通过与普通离散 SMC 的应用仿真对 比,证明了该方法通过适当参数设置,不但保证了滑 模到达,消除了 SMC 的抖振,还保留了 SMC 很强的 鲁棒性能。 该方法对离散 SMC 的应用具有一定价 值,需进一步加强其在实际控制系统中的应用研究。 参考文献: [1]李继超,管萍,刘小河.间接自适应模糊滑模控制在电弧 炉中的应用[J].系统仿真学报, 2009, 21(2): 542⁃546. LI Jichao, GUAN Ping, LIU Xiaohe. Application of indirect adaptive fuzzy sliding mode control in arc furnace[J]. Jour⁃ nal of System Simulation, 2009, 21(2): 542⁃546. [2]刘姗梅,马迁,陈贤顺,等.自适应模糊滑模控制在 PMSM 中的应用[J].微电机, 2009, 42(5): 43⁃46, 87. LIU Shanmei, MA Qian, CHEN Xianshun, et al. Applica⁃ tion of adaptive fuzzy sliding mode controller in PMSM[ J]. Micromotors, 2009, 42(5): 43⁃46, 87. [3]张向文,王飞跃.汽车 ABS 自适应模糊滑模控制算法研 究[J]. 汽车技术, 2009, 40(10): 25⁃30. ZHANG Xiangwen, WANG Feiyue. Study on adaptive fuzzy sliding mode control algorithm for the vehicle ABS[J]. Au⁃ tomobile Technology, 2009, 40 (10): 25⁃30. [4]董小闵,余淼,廖昌荣,等. 具有非线性时滞的汽车磁流 变悬架系统自适应模糊滑模控制[ J]. 振动与冲击, 2009, 28(11): 55⁃60, 203. DONG Xiaomin, YU Miao, LIAO Changrong, et al. Adap⁃ tive fuzzy sliding mode control for magneto-rheological sus⁃ pension system considering nonlinearity and time delay[ J]. Journal of Vibration and Shock, 2009, 28 ( 11): 55⁃60, 203. [5]高文达,方一鸣,张文亮,等. 自适应模糊滑模控制在伺 服电动机系统中的应用[ J]. 微特电机, 2009, 37(11): 32⁃36. GAO Wenda, FANG Yiming, ZHANG Wenliang, et al. Ap⁃ plication of adaptive fuzzy sliding mode control to servomotor system[J]. Micromotors, 2009, 37(11): 32⁃36. [6]张金萍,刘阔,林剑峰,等.挖掘机的 4 自由度自适应模糊 滑模控制[J].机械工程学报, 2010, 46(21): 87⁃92. ZHANG Jinping, LIU Kuo, LIN Jianfeng, et al. 4⁃DOF a⁃ daptive fuzzy sliding mode control of excavator[ J]. Journal of Mechanical Engineering, 2010, 46(21): 87⁃92. [7]王宏伟,井元伟,于驰.基于自适应模糊滑模控制的主动 队列管理算法[J].系统仿真学报, 2008, 20(23): 6330⁃ 6332, 6342. WANG Hongwei, JING Yuanwei, YU Chi. Active queue management algorithm based on adaptive fuzzy sliding mode control[J]. Journal of System Simulation, 2008, 20(23): 6330⁃6332, 6342. [8]赵红超,徐君明,王东.变质心弹头的自适应模糊滑模控 制[ J]. 清华大学学报:自然科学版, 2008, 48 ( S2): 1733⁃1736. ZHAO Hongchao, XU Junming, WANG Dong. Adaptive fuzzy sliding mode control for mass motion warhead [ J]. Journal of Tsinghua University: Science and Technology, 2008, 48(S2): 1733⁃1736. [9]彭亚为,陈娟,刘占富, 等. 自适应模糊滑模控制在化工 过程中的应用[J].化工学报, 2012, 63(9): 2843⁃2850. PENG Yawei, CHEN Juan, LIU Zhanfu, et al. Adaptive sliding mode control in chemical process application [ J]. Journal of Chemical Industry and Engineering, 2012, 63 ·202· 智 能 系 统 学 报 第 9 卷