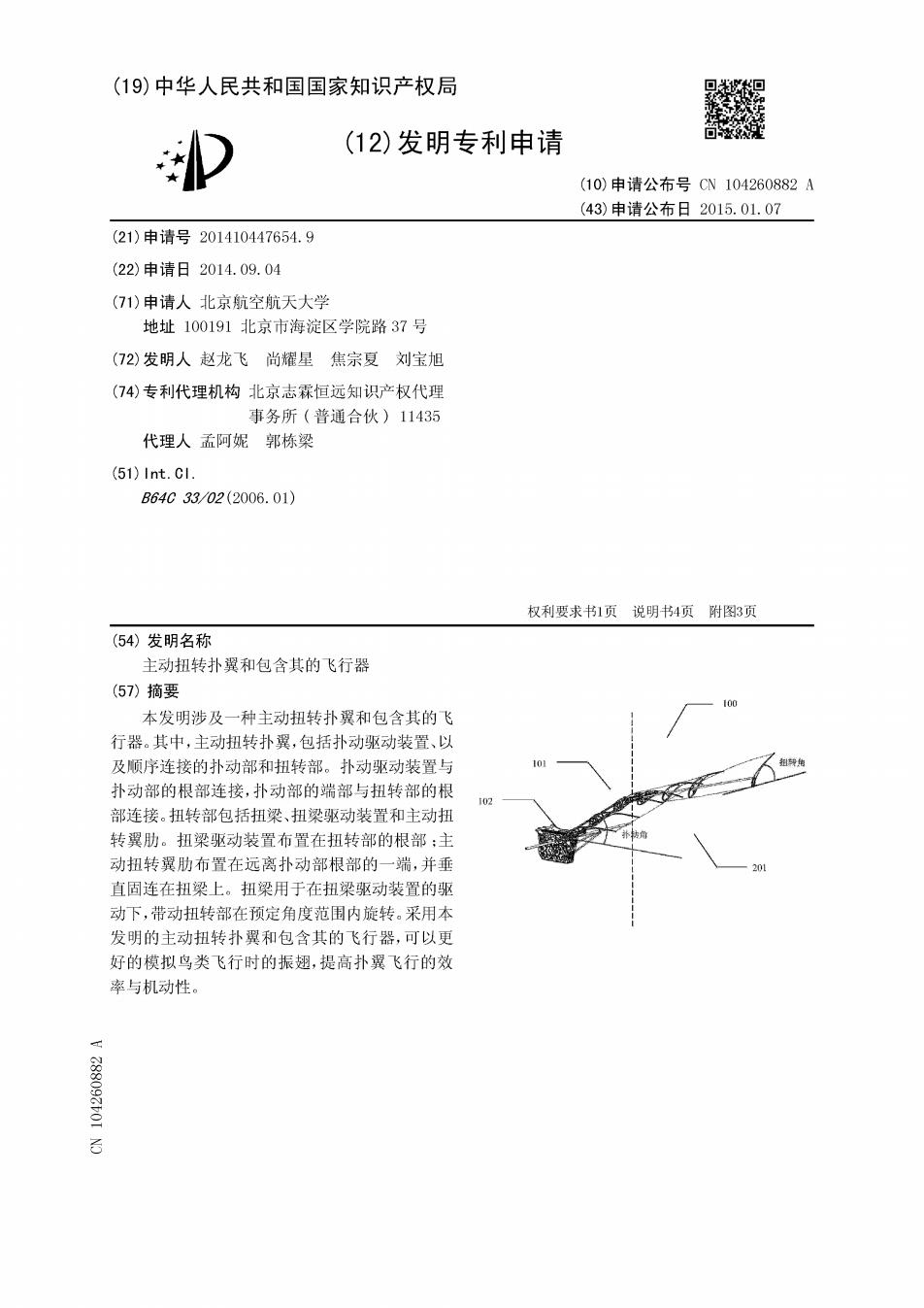
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN104260882A (43)申请公布日2015.01.07 (21)申请号201410447654.9 (22)申请日2014.09.04 (71)申请人北京航空航天大学 地址100191北京市海淀区学院路37号 (72)发明人赵龙飞尚耀星焦宗夏刘宝旭 (74)专利代理机构北京志霖恒远知识产权代理 事务所(普通合伙)11435 代理人孟阿妮郭栋梁 (51)1nt.cl. B64C33/02(2006.01) 权利要求书1页说明书4页附图3页 (54)发明名称 主动扭转扑翼和包含其的飞行器 (57)摘要 本发明涉及一种主动扭转扑翼和包含其的飞 行器。其中,主动扭转扑翼,包括扑动驱动装置、以 及顺序连接的扑动部和扭转部。扑动驱动装置与 101 扑动部的根部连接,扑动部的端部与扭转部的根 02 部连接。扭转部包括扭梁、扭梁驱动装置和主动扭 转翼肋。扭梁驱动装置布置在扭转部的根部:主 动扭转翼肋布置在远离扑动部根部的一端,并垂 直固连在扭梁上。扭梁用于在扭梁驱动装置的驱 动下,带动扭转部在预定角度范围内旋转。采用本 发明的主动扭转扑翼和包含其的飞行器,可以更 好的模拟鸟类飞行时的振翅,提高扑翼飞行的效 率与机动性
CN104260882A 权利要求书 1/1页 1.一种主动扭转扑翼,包括扑动驱动装置、以及顺序连接的扑动部和扭转部:所述扑 动驱动装置与所述扑动部的根部连接,所述扑动部的端部与所述扭转部的根部连接; 其特征在于,所述扭转部包括扭梁、扭梁驱动装置和主动扭转翼肋: 其中, 所述扭梁驱动装置布置在所述扭转部的根部: 所述主动扭转翼肋布置在远离所述扑动部根部的一端,并垂直固连在所述扭梁上,所 述扭梁用于在所述扭梁驱动装置的驱动下,带动所述扭转部在预定角度范围内旋转。 2.根据权利要求1所述的主动扭转扑翼,其特征在于,所述扭梁驱动装置包括扭转作 动器、扭转传动连杆组和扭梁支撑架; 其中, 所述扭梁支撑架包括用于支撑所述扭梁的轴承: 所述扭转作动器用于基于外部控制指令产生扭力; 所述扭转传动连杆组用于将所述扭力传递至所述扭梁。 3.根据权利要求2所述的主动扭转扑翼,其特征在于:还包括蒙皮和被动扭转翼肋; 所述蒙皮覆盖整个主动扭转扑翼,且与所述主动扭转翼肋固连,用于在所述主动扭转 扑翼扑动时,产生升力: 所述被动扭转翼肋与所述蒙皮固连,用于当所述主动扭转翼肋旋转时,在所述蒙皮带 动下转动。 4.根据权利要求13任意一项所述的主动扭转扑翼,其特征在于: 所述预定角度范围为-10°~15°。 5.根据权利要求4所述的主动扭转扑翼,其特征在于: 所述主动扭转翼肋的扭转频率与所述主动扭转扑翼的振翅频率相同,且所述主动扭转 翼肋的扭转角与所述主动扭转扑翼的振翅的主扑动角的相位成正、余弦关系。 6.根据权利要求2所述的主动扭转扑翼,其特征在于: 所述扭转作动器包括HITEC65MG金属齿轮航模舵机。 7.根据权利要求1-3任意一项所述的主动扭转扑翼,其特征在于: 所述主动扭转翼肋和所述被动扭转翼肋的材质为碳纤维板。 8.根据权利要求2所述的主动扭转扑翼,其特征在于: 所述扭梁支撑架还包括与所述主动扭转翼肋平行的第一翼肋和第二翼肋、垂直于所述 第一翼肋和第二翼肋的第一短梁和第二短梁; 其中, 所述第一翼肋与第二翼肋通过所述轴承与所述扭梁连接; 所述第一短梁的第一端和第二短梁的第一端与所述第一翼肋固连,所述第一短梁的第 二端和第二短梁的第二端与所述第二翼肋固连。 9.根据权利要求3所述的主动扭转扑翼,其特征在于: 所述蒙皮采用厚度为2mm的发泡聚丙烯泡沫板。 10.一种飞行器,其特征在于:包括机身,以及对称设置于机身两侧的两个如权利要求 1-9任意一项所述的主动扭转扑翼
CN104260882A 说明书 1/4页 主动扭转扑翼和包含其的飞行器 技术领域 [0001]本申请涉及一种扭转扑翼,特别是一种主动扭转扑翼和包含其的飞行器。 背景技术 [0002]扑翼飞行是自然界中动物动力飞行最优的方式。扑翼飞行与固定翼、旋翼飞行相 比效率高,噪音小,机动性强,更安全,尤其适合低空慢速飞行器。小尺寸扑翼飞行器也具有 得天独厚的隐蔽性能,可胜任侦查,单兵作战等军事任务,潜力巨大。然而目前人类所制造 的扑翼飞机效率大多不高,究其原因,这些扑翼飞机只模仿了鸟类最基本的扑打动作。而鸟 类之所以具有优越的飞行能力,更益于一些“小动作”。解剖鸟类翅膀发现,鸟类的小臂与人 类小臂结构类似,由尺骨与桡骨构成,具有扭转自由度。鸟类飞行的过程中,正是根据飞行 速度、飞行方向与想要完成的机动动作来主动周期性扭转小臂,进行推力与升力的最优组 合,使扑动产生的气动效果尽可能大的为飞行服务,并产生控制姿态的力与力矩,极大提高 了扑翼飞行效率与机动性。 [0003]专利公布号为CN103612754A的专利中介绍了一种双关节扑翼,可以实现上、下行 程的非对称扑动,然而扑翼上没有可以控制扭转的机构,只依靠将扑翼外段做成柔性,利用 扑动时空气阻力来改变外段迎角,是所谓的被动扭转扑翼。同时这种扑翼无法产生控制力 与力矩,只能依靠尾部控制飞行姿态,大大限制了机动性能。国外研究成果已经证明,主动 扭转对飞行效率的提高要远高于被动扭转。 [0004]专利公布号为CN103241379A的专利中介绍了一种机械传动的主动扭转扑翼,但 这种扭转方式用机构确定了扭转的幅值与相位,无法针对空速与机动要求动态调整,尽管 通过良好优化设计,也只能在比较小的飞行包线内提高飞行效率。 发明内容 [0005]在下文中给出关于本发明的简要概述,以便提供关于本发明的某些方面的基本理 解。应当理解,这个概述并不是关于本发明的穷举性概述。它并不是意图确定本发明的关 键或重要部分,也不是意图限定本发明的范围。其目的仅仅是以简化的形式给出某些概念, 以此作为稍后论述的更详细描述的前序。 [0006]本发明的一个主要目的在于提供一种主动扭转扑翼和包含其的飞行器,其可实现 鸟类小臂在扑翼飞行中的主动扭转动作,高度仿生,极大提高扑翼飞行效率与机动性。 [0007]根据本发明的一个方面,一种主动扭转扑翼,包括扑动驱动装置、以及顺序连接的 扑动部和扭转部:所述扑动驱动装置与所述扑动部的根部连接,所述扑动部的端部与所述 扭转部的根部连接: [0008] 所述扭转部包括扭梁、扭梁驱动装置和主动扭转翼肋; [0009] 其中, [0010] 所述扭梁驱动装置布置在所述扭转部的根部; [0011]所述主动扭转翼肋布置在远离所述扑动部根部的一端,并垂直固连在所述扭梁
CN104260882A 说明书 2/4页 上,所述扭梁用于在所述扭梁驱动装置的驱动下,带动所述扭转部在预定角度范围内旋转。 [0012]根据本发明的第二方面,一种飞行器,包括机身,以及对称设置于机身两侧的两个 主动扭转扑翼。 [0013]采用本发明的主动扭转扑翼和包含其的飞行器,可以更好的模拟鸟类飞行时的振 翅,提高扑翼飞行的效率与机动性。 附图说明 [0014]参照下面结合附图对本发明实施例的说明,会更加容易地理解本发明的以上和其 它目的、特点和优点。附图中的部件只是为了示出本发明的原理。在附图中,相同的或类似 的技术特征或部件将采用相同或类似的附图标记来表示。 [0015]图1为本发明的主动扭转扑翼的一种实施方式的结构图; [0016]图2为图1中的扑动部的一种实施方式的结构图; [0017]图3为本发明的主动扭转扑翼的主扑动角与扭转角之间的相位关系的一种实施 方式的示意图; [0018]图4为本发明的扭梁支撑架的一种实施方式的结构图: [0019] 图5为本发明的扑翼飞行器的一种实施方式的结构图。 具体实施方式 [0020]下面参照附图来说明本发明的实施例。在本发明的一个附图或一种实施方式中描 述的元素和特征可以与一个或更多个其它附图或实施方式中示出的元素和特征相结合。应 当注意,为了清楚的目的,附图和说明中省略了与本发明无关的、本领域普通技术人员已知 的部件和处理的表示和描述。 [0021] 参见图1所示,为本发明的主动扭转扑翼的一种实施方式的结构图。 [0022] 在本实施方式中,主动扭转扑翼100包括扑动驱动装置102、以及顺序连接的扑动 部101和扭转部201。扑动驱动装置102与扑动部101的根部连接,扑动部101的端部与扭 转部201的根部连接。 [0023]扑动驱动装置102驱动扑动部101上下扑动,而扭转部201由于与扑动部101连 接在一起,可以在扑动部101带动下随之上下扑动。 [0024]参见图2所示,为扭转部201的一种实施方式的结构图。 [0025] 在本实施方式中,扭转部201可以包括扭梁2、扭梁驱动装置和主动扭转翼肋1。其 中,扭梁驱动装置布置在扭转部201的根部;:主动扭转翼肋1布置在远离扑动部201根部的 一端,并垂直固连在扭梁2上。 [0026]扭梁2可以在扭梁驱动装置的驱动下,带动整个扭转部201在预定角度范围内旋 转。扭梁驱动装置布置在扭转部201的根部,可以尽量减少扑动过程中的惯量,以减小扑动 驱动装置的扭力要求。 [0027]由于扭转部201可以在扭梁驱动装置的驱动下进行主动扭转,使得整个主动扭转 扑翼100可以更好地模仿鸟类飞行过程中周期性转动小臂的动作,进而使得主动扭转扑翼 飞行效率与机动性能得到提升。 [0028]作为一种实施方式,扭梁驱动装置可以包括扭转作动器5、扭转传动连杆组6和扭
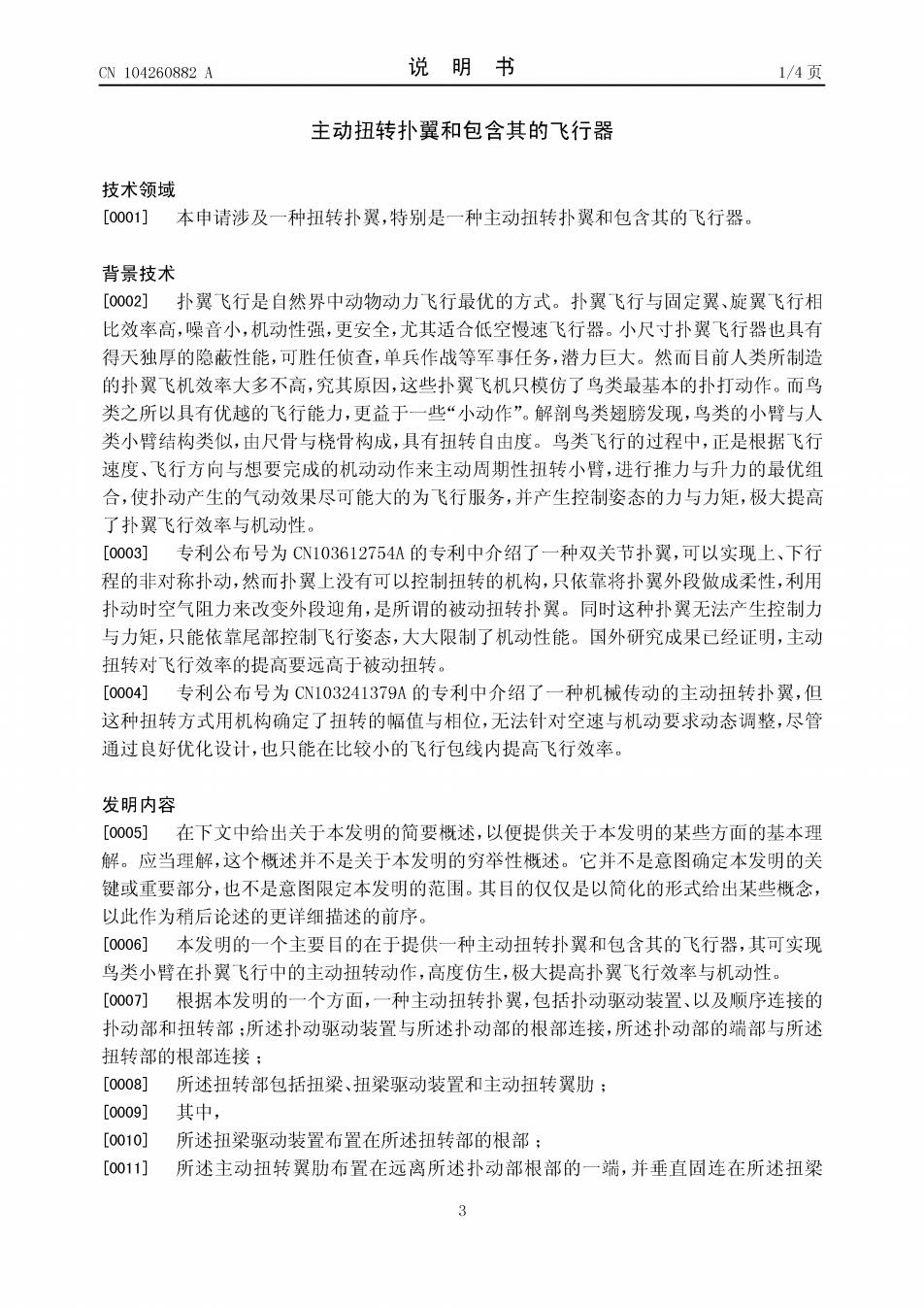
CN104260882A 说明书 3/4页 梁支撑架4。其中,扭梁支撑架4包括用于支撑扭梁2的轴承:扭转作动器用于基于外部控 制指令产生扭力:扭转传动连杆组6用于将扭力传递至扭梁2。 [0029] 当扭梁驱动装置在外部控制信号的控制下产生扭力时,扭转传动连杆组6将该扭 力传递至扭梁2,使得扭梁2转动,进而带动扭梁2上固定的主动扭转翼肋1转动。 [0030]进一步地,主动扭转扑翼还包括蒙皮7和被动扭转翼肋3。 [0031]蒙皮7覆盖整个主动扭转扑翼100,且与主动扭转翼肋1固连,用于在主动扭转扑 翼100扑动时,产生升力。 [0032] 被动扭转翼肋3与蒙皮7固连,用于当主动扭转翼肋1旋转时,在蒙皮7带动下转 动。 [0033] 由于蒙皮7与主动扭转翼1肋固连,在主动扭转翼肋1转动时,可以带动蒙皮7产 生扭转,进而可以使得主动扭转扑翼100产生的升力发生变化。而蒙皮7又与被动扭转翼 肋3固连,可在带动被动扭转翼肋3旋转的同时,使蒙皮7与扭梁2的相对位置较为固定, 从而使得产生的升力在可控的范围内。 [o034]蒙皮7例如可以采用厚度为2mm的发泡聚丙烯泡沫板,其具有一定柔韧性又可以 很好的维持机翼的截面形状。 [0035]作为一种优选方案,预定角度范围例如可以是-10°~15°。也即是说,在主动扭 转扑翼100扑动时,主动扭转翼肋1与水平面之间的夹角(即扭转角)在-10°~15°内 随着主动扭转扑翼100的上下扑动规律性地变化。 [0036]在一种实施方式中,主动扭转翼肋1的扭转频率与主动扭转扑翼100的振翅频率 相同。也即是说,主动扭转扑翼100上下扑动一次,主动扭转翼肋1在预定角度范围内从最 小值到最大值变化一次。 [0037]作为一种优选方案,主动扭转翼肋1的扭转角可以与主动扭转扑翼100的振翅的 主扑动角(即扑动部101与水平面之间的夹角)的相位成正、余弦关系。具体而言,参见 图3所示,当主动扭转扑翼由最低点向上扑动至最高点过程中,扑翼的扭转角由0°增大至 15°,过扑动中位后再减小至0°:当扑翼由最高点向下扑动至最低点过程中,扑翼扭转角 由0°减小至-10°,过扑动中位后再增加至0°。 [0038]在一种实施方式中,扭转作动器5例如可以包括HITEC65MG金属齿轮航模舵机。 该舵机的反应速度为0.14sec/60°,可以完全满足主动扭转的角速度要求,同时其金属齿 轮提高了该舵机在冲击工况下的可靠性。 [0039]在一种实施方式中,主动扭转翼肋1和被动扭转翼肋3的材质可以是碳纤维板。该 种材料质量较轻,且刚度能够满足使用需求。 [0040]作为一种优选方案,如图4所示,扭梁支撑架4还可以包括与主动扭转翼肋1平行 的第一翼肋9和第二翼肋11、垂直于第一翼肋9和第二翼肋11的第一短梁8和第二短梁 12。 [0041]其中,第一翼肋9与第二翼肋11通过轴承10与扭梁2连接。第一短梁8的第一 端和第二短梁12的第一端与第一翼肋9固连,第一短梁8的第二端和第二短梁12的第二 端与第二翼肋11固连。采用该结构的扭梁支撑架4,更加稳定,且可以仅将扭力传递给扭梁 2,而不传递弯矩和剪切力。 [0042]参见图5所示,为本发明的飞行器的一种实施方式的结构图
CN104260882A 说明书 4/4页 [0043] 在本实施方式中,飞行器包括机身200,以及对称设置于机身200两侧的两个主动 扭转扑翼100。 [0044]飞行器还可以包括控制器和安装在主动扭转扑翼100上的位置传感器。 [0045] 在飞行器飞行时,位置传感器得到主动扭转扑翼100的扑动角并传递给控制器, 控制器基于当前的扑动角根据相应的控制策略产生扭转角控制信号。扭转作动器5得到控 制信号后,扭转相应的角度,经过扭转传动连杆组6将旋转传递给扭梁2与最外端的主动扭 转翼肋1。主动扭转翼肋1将蒙皮7外端扭动至目标角度,从而获得相应的升力。 [0046]在飞行器协调转弯或滚转时,控制器产生的副翼指令控制二主动扭转扑翼100的 扭转角产生差动,且差动角度与副翼指令大小成正比。 [0047]具体而言,在一种情况下,当出现左副翼指令(令飞行器向左滚转),扑翼左 右两侧扭转角中位变为:左侧-5°,右侧+5°。这样,左侧的主动扭转角度范围变为 (10-5)°~(+15-5)°),即(-15°~+10°),同理右侧的主动扭转角度变为(-5°~ +20°)。 [0048]这种差值会造成左、右两侧扑翼产生的升力出现差值,从而产生使飞行器滚转的 控制力。 [0049] 应当注意的是,扭转角度变化规律不随该差动角度的出现而改变。也即是说,在正 常飞行时,扑动角与扭转角之间的相位关系与在差动角度出现时,扑动角与扭转角之间的 相位关系是相同的,例如,扑动角与扭转角的相位保持正、余弦关系。 [0050]采用本发明的主动扭转扑翼和包含其的飞行器,可以更好的模拟鸟类飞行时的振 翅,提高扑翼飞行的效率与机动性。 [0051]在本发明的设备和方法中,显然,各部件或各步骤是可以分解、组合和/或分解后 重新组合的。这些分解和/或重新组合应视为本发明的等效方案。还需要指出的是,执行上 述系列处理的步骤可以自然地按照说明的顺序按时间顺序执行,但是并不需要一定按照时 间顺序执行。某些步骤可以并行或彼此独立地执行。同时,在上面对本发明具体实施例的 描述中,针对一种实施方式描述和/或示出的特征可以以相同或类似的方式在一个或更多 个其它实施方式中使用,与其它实施方式中的特征相组合,或替代其它实施方式中的特征。 [0052]应该强调,术语“包括/包含”在本文使用时指特征、要素、步骤或组件的存在,但 并不排除一个或更多个其它特征、要素、步骤或组件的存在或附加。 [0053]虽然己经详细说明了本发明及其优点,但是应当理解在不超出由所附的权利要求 所限定的本发明的精神和范围的情况下可以进行各种改变、替代和变换。而且,本申请的范 围不仅限于说明书所描述的过程、设备、手段、方法和步骤的具体实施例。本领域内的普通 技术人员从本发明的公开内容将容易理解,根据本发明可以使用执行与在此所述的相应实 施例基本相同的功能或者获得与其基本相同的结果的、现有和将来要被开发的过程、设备、 手段、方法或者步骤。因此,所附的权利要求旨在在它们的范围内包括这样的过程、设备、手 段、方法或者步骤。 6

CN104260882A 说明书附图 1/3页 100 101 扭转角 102 扑耖角 201 图1 4 5 7 6 图2

CN104260882A 说明书 附图 2/3页 角度 扑动角 主动扭转角 时间 图3 11 10 9 12 8 图4

CN104260882A 说明书附图 3/3页 100 200 图5 9