试卷代号:1118 座位号■■ 国家开放大学(中央广播电视大学)2015年春季学期“开放本科”期末考试 机电一体化系统设计基础 试题 2015年7月 题 号 二 三 四 五 总 分 分 数 得 分 评卷人 一、单选题(每小题3分,共24分)】 1.机电一体化技术是以( )技术为核心,强调各种技术的协同和集成的综合性技术。 A.自动化 B.电子 C.机械 D.软件 2.多级齿轮传动中,各级传动比相等的分配原则适用于按( )设计的传动链。 A.最小等效转动惯量原则 B.输出轴的转角误差最小原则 C,小功率装置的重量最轻原则 D.大功率装置的重量最轻原则 3.下列哪项指标是传感器的动特性?( A.量程 B.线性度 C.灵敏度 D.幅频特性 4.有一脉冲电源,通过环形分配器将脉冲分配给五相十拍通电的步进电机定子励磁绕组, 已知转子有24个齿,步进电机的步距角是()。 A.0.6° B.1.2° C.1.5° D.2° 431
试卷代号 :1118 座位号仁口 国家开放大学(中央广播电视大学)2015 年春季学期"开放本科"期末考试 机电一体化系统设计基础 试题 E 2015 四|五|总分| l 一、单选题{每小题 分,共 24 分} 1.机电一体化技术是以( )技术为核心,强调各种技术的协同和集成的综合性技术。 A. 自动化 B. 电子 c. 机械 D. 软件 2. 多级齿轮传动中,各级传动比相等的分配原则适用于按( )设计的传动链。 A.最小等效转动惯量原则 B. 输出轴的转角误差最小原则 c. 小功率装置的重量最轻原则 D. 大功率装置的重量最轻原则 3. 下列哪项指标是传感器的动特性? ( ) A. 量程 B. 线性度 c. 灵敏度 D. 幅频特性 4. 有一脉冲电源,通过环形分配器将脉冲分配给五相十拍通电的步进电机定子励磁绕组, 已知转子有 24 个齿,步进电机的步距角是( )。 A. O. 60 B. 1. 20 C. 1. 50 D. 20 431
5.计算机控制系统实际运行时,需要由用户自行编写( ),具有实时性、针对性、灵活性 和通用性。 A.应用软件 B.开发软件 C.系统软件 D.实时软件 6.PD控制算法中,微分调节器的主要作用是()。 A.消除静差 B.加快响应 C.减小振荡 D.提高稳定性 7.含有微处理器,可进行程序编制或适应条件变化的接口是( A.零接口 B.被动接口 C.主动接口 D.智能接口 8.HRGP-1A喷漆机器人中的旋转变压器属于系统中的()。 A.能源部分 B.测试传感部分 C.控制器 D.执行机构 得 分 评卷人 二、判断题(正确的打/,错误的打×,每题3分,共30分) 9.机电一体化产品不仅是人的肢体的延伸,还是人的感官与头脑功能的延伸,具有“智能 化”的特征是机电一体化与机械电气化在功能上的本质差别。() 10.采用偏心轴套调整法对齿轮传动的侧隙进行调整,结构简单,且可以自动补偿侧隙。 () 11.伺服驱动系统在控制信息作用下提供动力,伺服驱动包括电动、气动、液压等各种类型 的驱动装置。() 12.永磁型步进电动机即使其定子绕组断电也能保持一定转矩,故具有记忆能力,可用于 定位驱动。() 13.直流伺服电动机的调速特性是电机转速与其输出转矩的关系。() 14.自动控制是在人直接参与的情况下,通过控制器使被控对象或过程自动地按照预定的 规律运行。() 432
5. 计算机控制系统实际运行时,需要由用户自行编写( ) ,具有实时性、针对性、灵活性 和通用性。 A. 应用软件 c. 系统软件 B. 开发软件 D. 实时软件 6.PID 控制算法中,微分调节器的主要作用是( )。 A. 消除静差 B. 加快响应 c. 减小振荡 D. 提高稳定性 7. 含有微处理器,可进行程序编制或适应条件变化的接口是( )。 A. 零接口 B. 被动接口 c. 主动接口 D.智能接口 8. HRGP-1A 喷漆机器人中的旋转变压器属于系统中的( )。 A. 能源部分 B. 测试传感部分 c. 控制器 |得分|评卷人| ! D. 执行机构 二、判断题{正确的打.J, 错误的打 ,每题 分,共 30 分} 9. 机电一体化产品不仅是人的肢体的延伸,还是人的感官与头脑功能的延伸,具有"智能 化"的特征是机电一体化与机械电气化在功能上的本质差别。( ) 10. 采用偏心轴套调整法对齿轮传动的侧隙进行调整,结构简单,且可以自动补偿侧隙。 ( ) 1.伺服驱动系统在控制信息作用下提供动力,伺服驱动包括电动、气动、液压等各种类型 的驱动装置。( ) 12. 永磁型步进电动机即使其定子绕组断电也能保持一定转矩,故具有记忆能力,可用于 定位驱动。( ) 13. 直流伺服电动机的调速特性是电机转速与其输出转矩的关系。( ) 14. 自动控制是在人直接参与的情况下,通过控制器使被控对象或过程自动地按照预定的 规律运行。( ) 432
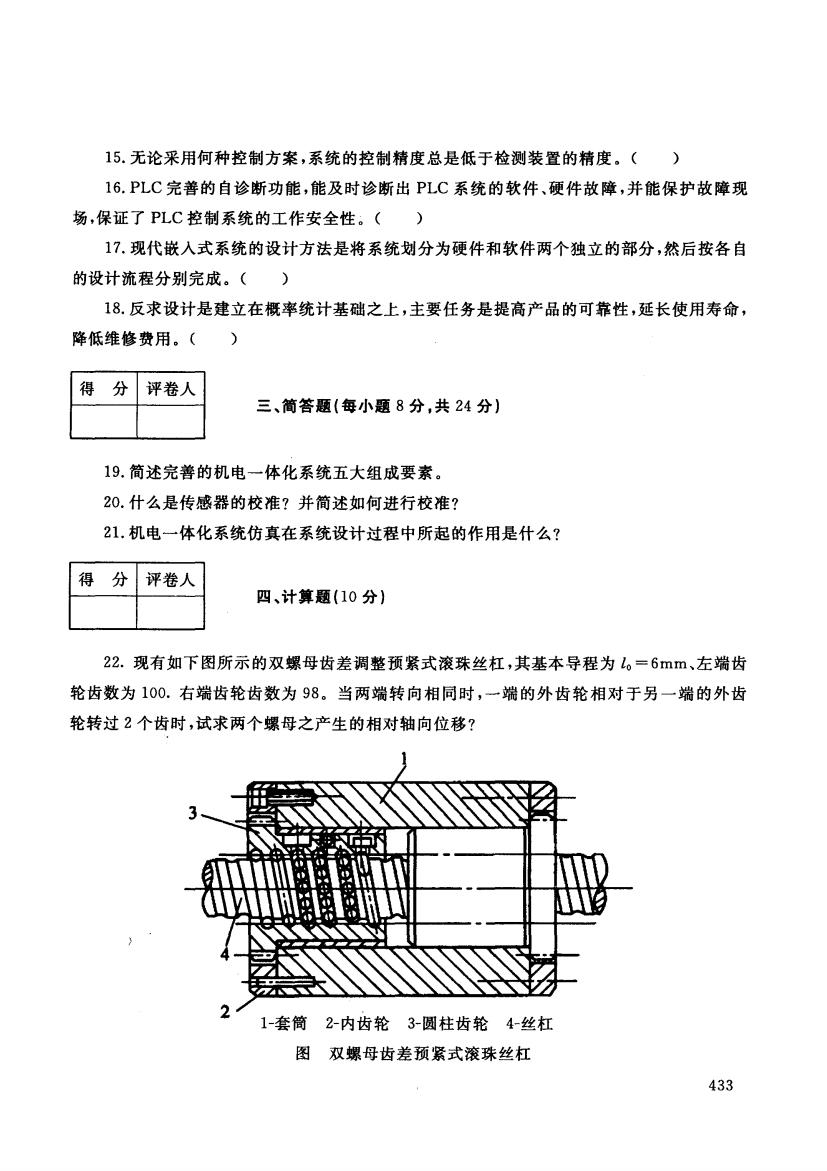
15.无论采用何种控制方案,系统的控制精度总是低于检测装置的精度。() 16.PLC完善的自诊断功能,能及时诊断出PLC系统的软件、硬件故障,并能保护故障现 场,保证了PLC控制系统的工作安全性。() 17.现代嵌入式系统的设计方法是将系统划分为硬件和软件两个独立的部分,然后按各自 的设计流程分别完成。() 18.反求设计是建立在概率统计基础之上,主要任务是提高产品的可靠性,延长使用寿命, 降低维修费用。( 得 分 评卷人 三、简答题(每小题8分,共24分) 19.简述完善的机电一体化系统五大组成要素。 20.什么是传感器的校准?并简述如何进行校准? 21.机电一体化系统仿真在系统设计过程中所起的作用是什么? 得 分 评卷人 四、计算题(10分) 22.现有如下图所示的双螺母齿差调整预紧式滚珠丝杠,其基本导程为l。=6mm、左端齿 轮齿数为100.右端齿轮齿数为98。当两端转向相同时,一端的外齿轮相对于另一端的外齿 轮转过2个齿时,试求两个螺母之产生的相对轴向位移? 1-套筒2-内齿轮3-圆柱齿轮4-丝杠 图双螺母齿差预紧式滚珠丝杠 433
15. 无论采用何种控制方案,系统的控制精度总是低于检测装置的精度。( ) 16. PLC 完善的自珍断功能,能及时诊断出 PLC 系统的软件、硬件故障,并能保护故障现 场,保证了 PLC 控制系统的工作安全性。( ) 17. 现代嵌入式系统的设计方法是将系统划分为硬件和软件两个独立的部分,然后按各自 的设计流程分别完成。( ) 18. 反求设计是建立在概率统计基础之上,主要任务是提高产品的可靠性,延长使用寿命, 降低维修费用。( ) |得分|评卷人| | 三、简答题{每小题 分,共 24 分} 19. 简述完善的机电一体化系统五大组成要素。 20. 什么是传感器的校准?并简述如何进行校准? 1.机电一体化系统仿真在系统设计过程中所起的作用是什么? |得分|评卷人| | 四、计算题(1 分} 22. 现有如下图所示的双螺母齿差调整预紧式滚珠丝杠,其基本导程为 Zo=6mm 、左端齿 轮齿数为 100. 右端齿轮齿数为 98 当两端转向相同时,一端的外齿轮相对于另一端的外齿 轮转过 个齿时,试求两个螺母之产生的相对轴向位移? 3 1-套筒 2- 内齿轮 3- 圆柱齿轮 4- 丝杠 双螺母齿差预紧式滚珠丝杠 433
得分 评卷人 五、综合题(12分) 23.假定你在设计一套典型的机电一体化系统,比如数控机床,请制订出概念设计的流 程。 434
|得分|评卷人| | 五、综合题(1 分} 23. 假定你在设计一套典型的机电一体化系统,比如数控机床,请制订出概念设计的流 程。 434
试卷代号:1118 国家开放大学(中央广播电视大学)2015年春季学期“开放本科”期末考试 机电一体化系统设计基础 试题答案及评分标准 (供参考) 2015年7月 一、单选题(每题3分,共24分)】 1.B 2.C 3.D 4.C 5.A 6.B 7.D 8.B 二、判断题(每题3分,共30分) 9.√ 10.× 11./ 12./ 13.× 14.× 15./ 16.√ 17.× 18.× 三、简答题(每小题8分,共24分) 19.答:机电一体化系统是由机械本体和动力系统,检测传感系统和执行部件,信息处理及 控制系统五部分相互协调,共同完成所规定的目的功能。 20.答:传感器在使用前、使用中或搁置一段时间再使用时必须对其性能参数进行复测或 做必要的调整和修正,以确保传感器的测量精度,这个复测调整过程称为校准。 为了对传感器有一个长期的、稳定的和高精度的基准,在一些测量仪器中特别是内部装有 微处理器的测量仪器中,很容易实现自动校准功能。对传感器进行校准时,需要精度比它高的 基准器,这种基准器受时间的推移和使用的磨损等因素的影响,参数会随之改变。因此对这种 基准器还要用更高精度的基准器来定期校准。 21.答:在进行项目的设计和规划时,往往需要对项目的合理性、经济性等品质加以评价; 在系统实际运行前,也希望对项目的实施结果加以预测,以便选择正确、高效的运行策略或提 前消除设计中的缺陷,最大限度地提高实际系统的运行水平。采用仿真技术可以省时、省力、 省钱地达到上述目的。 四、计算题(10分)】 22.解:左端外齿轮旋转一周,螺母轴向移动6mm,则每转一个齿,螺母的轴向移动6/100 =0.06mm; 右端外齿轮旋转一周,螺母轴向移动6mm,则每转一个齿,螺母的轴向移动6/98=0.0612mm: 当两端转向相同时:一端的外齿轮相对于另一端的外齿轮转过1个齿时,相对移动的轴向 435
试卷代号 :1118 国家开放大学(中央广播电视大学 )2015 年春季学期"开放本科"期末考试 机电一体化系统设计基础 试题答案及评分标准 -、单选题{每题 分,共 24 分} 1. B 5.A 2.C 6. B 二、判断题{每题 分,共 30 分} 9. .J 10. X (供参考) 3.D 7.D 11. .J 4. C 8. B 12. .J 13. X 14. X 15. .J 16. .J 17. X 18. X 三、简答题{每小题 分,共 24 分} 2015 19. 答:机电一体化系统是由机械本体和动力系统,检测传感系统和执行部件,信息处理及 控制系统五部分相互协调,共同完成所规定的目的功能。 20. 答:传感器在使用前、使用中或搁置一段时间再使用时必须对其性能参数进行复测或 做必要的调整和修正,以确保传感器的测量精度,这个复测调整过程称为校准。 为了对传感器有一个长期的、稳定的和高精度的基准,在一些测量仪器中特别是内部装有 微处理器的测量仪器中,很容易实现自动校准功能。对传感器进行校准时,需要精度比它高的 基准器,这种基准器受时间的推移和使用的磨损等因素的影响,参数会随之改变。因此对这种 基准器还要用更高精度的基准器来定期校准。 1.答 在进行项目的设计和规划时,往往需要对项目的合理性、经济性等品质加以评价; 在系统实际运行前,也希望对项目的实施结果加以预测,以便选择正确、高效的运行策略或提 前消除设计中的缺陷,最大限度地提高实际系统的运行水平。采用仿真技术可以省时、省力、 省钱地达到上述目的。 四、计算题(1 分) 22. 左端外齿轮旋转一周,螺母轴向移动 6mm ,则每转一个齿,螺母的轴向移动 6/100 =0.06mm; 右端外齿轮旋转一周,螺母轴向移动 6mm ,则每转一个齿,螺母的轴向移动 6/98=0.0612mm; 当两端转向相同时 一端的外齿轮相对于另一端的外齿轮转过 个齿时,相对移动的轴向 435

距离为0.0612一0.06=0.012(mm),所以当一端的外齿轮相对于另一端的外齿轮转过2个齿 时相对移动的轴向距离为(0.0612一0.06)*2=0.0024(mm)。 as=mX(-X=2×8-10)X0.06mm=2.4μm 五、综合题(12分) 23.解:产品概念设计决定性地影响产品创新过程中后续的产品详细设计、产品生产开 发、产品市场开发以及企业经营战略目标的实现。产品概念设计包含以下流程: 明确设计任务 分析 求总功能 黑箱法 总功能分解 功能逐级分解 寻找子功能解 创造性方法、目录法、 调查分析法 综合 原理解组合 形态学矩阵法 评价与决策 评价 各种评价方法 决策 概念产品 (1)首先是将设计任务抽象化,确定出系统的总功能;(2分) (2)根据系统的总功能要求和构成系统的功能要素进行总功能分解,划分出各功能模块, 将总功能分解为子功能,直到分解到不能再分解的功能元,形成功能树;确定它们之间的逻辑 关系:(2分) (3)对各功能模块输人/输出关系进行分析,确定功能模块的技术参数和控制策略、系统的 外观造型和总体结构,(2分) (4)寻找子功能(功能元)的解,并将原理解进行组合,形成多种原理解设计方案;(2分) (5)以技术文件的形式交付设计组讨论、审定。由于体现同一功能的产品可以有多种多样 的工作原理;(2分) (6)方案进行整体评价:对不同的方案进行整体评价,选择综合指标最优的设计方案。最 终选定最佳方案形成概念产品。(2分) (注:绘制出流程图或文字作答均可) 436
距离为 0.0612 0.06=0. 012(mm) ,所以当一端的外齿轮相对于另一端的外齿轮转过 个齿 时相对移动的轴向距离为 (0.0612 0.06) 2=0.0024(mm) 1 L... _.. 11 1 .!l s=nX( 一一一)Xl =2X (一一一一) XO. 06mm=2. 4μm %) %2 。一 98 100μ 五、综合噩(1 分} 23. 产品概念设计决定性地影响产品创新过程中后续的产品详细设计、产品生产开 发、产品市场开发以及企业经营战略目标的实现。产品概念设计包含以下流程 (1)首先是将设计任务抽象化,确定出系统的总功能川 分〉 (2) 根据系统的总功能要求和构成系统的功能要素进行总功能分解,划分出各功能模块, 将总功能分解为子功能,直到分解到不能再分解的功能元,形成功能树 确定它们之间的逻辑 关系 ;(2 分〉 (3) 对各功能模块输入/输出关系进行分析,确定功能模块的技术参数和控制策略、系统的 外观造型和总体结构 ;(2 分〉 (4) 寻找子功能(功能元〉的解,并将原理解进行组合,形成多种原理解设计方案 ;(2 分〉 (5) 以技术文件的形式交付设计组讨论、审定。由于体现同一功能的产品可以有多种多样 的工作原理 ;(2 分〉 (6) 方案进行整体评价 对不同的方案进行整体评价,选择综合指标最优的设计方案.最 终选定最佳方案形成概念产品。 (2 分) 〈注 绘制出流程图或文字作答均可〉 436