试卷代号:1118 座位号■■ 国家开放大学(中央广播电视大学)2016年春季学期“开放本科”期末考试 机电一体化系统设计基础 试题 2016年7月 题 号 三 四 五 总分 分数 得 分 评卷人 一、单选题(每小题3分,共24分) 1.以下产品属于机电一体化产品的是()。 A.游标卡尺 B.移动电话 C.全自动洗衣机 D.非指针式电子表 2.为提高机电一体化机械传动系统的固有频率,应设法()。 A.增大系统刚度 B.增大系统转动惯量 C.增大系统的驱动力矩 D.减小系统的摩擦阻力 3.导程L。=8mm的丝杠的总质量为6kg,标称直径为40mm,则其转动惯量为() kg·mm2。 A.1200 B.480 C.120 D.48 4.光栅传感器的光栅是在一块长条形的光学玻璃上密集等间距平行的刻线,刻线数为 100线/mm,经四倍细分后,记数脉冲为400,光栅位移是( )mm。 A.1 B.2 C.3 D.4 5,以下可对交流伺服电动机进行调速的方法是()。 A.改变电压的大小 B.改变电动机的供电频率 C.改变电压的相位 D.改变电动机转子绕组匝数 436
试卷代号 :1118 座位号 国家开放大学(中央广播电视大学)2016 年春季学期"开放本科"期末考试 机电一体化系统设计基础 试题 2016 E |二|三|四 l 五厅5tl || 一、单选题{每小题 分,共 24 分} 1.以下产品属于机电一体化产品的是( )。 A.游标卡尺 B. 移动电话 C. 全自动洗衣机 D. 非指针式电子表 2. 为提高机电一体化机械传动系统的固有频率,应设法( )。 A. 增大系统刚度 B. 增大系统转动惯量 C. 增大系统的驱动力矩 D. 减小系统的摩擦阻力 3. 导程 Lo =8mm 的丝杠的总质量为 6kg ,标称直径为 40mm ,则其转动惯量为( ) kg. mm A. 1200 C. 120 B.480 D.48 4. 光栅传感器的光栅是在一块长条形的光学玻璃上密集等间距平行的刻线,刻线数为 100 /mm ,经四倍细分后,记数脉冲为 400 ,光栅位移是( )mm A.1 C. 3 B.2 D.4 5. 以下可对交流伺服电动机进行调速的方法是( )。 A.改变电压的大小 B. 改变电动机的供电频率 C.改变电压的相位 D. 改变电动机转子绕组臣数 436
6.PID控制算法中,积分调节器的主要作用是( )。 A.提高稳定性 B.加快响应 C.减小振荡 D.消除静差 7.以下( )不属于系统功能结构图的基本结构形式。 A.串联结构 B.并联结构 C.环形结构 D.星形结构 8.旋转变压器是机器人电液伺服系统中的()。 A.驱动元件 B.能量元件 C.检测元件 D.控制元件 得 分 评卷人 二、判断题(正确的打√,错误的打×,每题3分,共30分) 9.机电一体化系统是以机械装置为主体电子技术为核心,强调各种技术的协同和集成的 综合性技术。() 10.产品的组成零部件和装配精度高,系统的精度一定就高。() 11.齿轮传动系统中各级传动比的最佳分配原则中等效转动惯量最小原则是使所设计的 齿轮传动系统换算到该齿轮传动系统输出轴上的等效转动惯量为最小。() 12.传感器的敏感元件是指传感器中能直接感受或响应被测量的部分。() 13.传感器的静态特性是特指输人量为常量时,传感器的输出与输人之间的关系。() 14.开环系统没有反馈回路,只能依据时间和逻辑顺序决定被控对象的运行方式,开环系 统简单、稳定、可靠,但精度较低,无自动纠偏能力。() 15.直流伺服电动机和永磁同步交流伺服电动机都可以采用PWM控制方式进行调速控 制。() 16.PID调节器由比例调节器、积分调节器和加法调节器通过线性组合而构成。() 17.绿色设计是对已有的产品或技术进行分析研究,进而对该系统(产品)进行剖析、重构、 再创造的设计。() 18.在数控设备中,计算机数控装置是设备的核心部分,一般由专用计算机、输人输出接口 以及机床控制器等部分构成。() 437
6. PID 控制算法中,积分调节器的主要作用是( )。 A. 提高稳定性 B. 加快响应 C. 减小振荡 D. 消除静差 7. 以下( )不属于系统功能结构图的基本结构形式。 A.串联结构 C. 环形结构 8. 旋转变压器是机器人电液伺服系统中的( A.驱动元件 C. 检测元件 B.并联结构 D. 星形结构 B.能量元件 D. 控制元件 |得分 评卷人| | 二、判断题{正确的打-J, 错误的打 ,每题 分,共 30 分) 9. 机电一体化系统是以机械装置为主体电子技术为核心,强调各种技术的协同和集成的 综合性技术。( ) 10. 产品的组成零部件和装配精度高,系统的精度一定就高。( ) 1.齿轮传动系统中各级传动比的最佳分配原则中等效转动惯量最小原则是使所设计的 齿轮传动系统换算到该齿轮传动系统输出轴上的等效转动惯量为最小。( ) 12. 传感器的敏感元件是指传感器中能直接感受或响应被测量的部分。( ) 13. 传感器的静态特性是特指输入量为常量时,传感器的输出与输人之间的关系。( ) 14. 开环系统没有反馈回路,只能依据时间和逻辑顺序决定被控对象的运行方式,开环系 统简单、稳定、可靠,但精度较低,无自动纠偏能力。( ) 15. 直流伺服电动机和永磁同步交流伺服电动机都可以采用 PWM 控制方式进行调速控 制。( ) 16. PID 调节器由比例调节器、积分调节器和加法调节器通过线性组合而构成。( ) 17. 绿色设计是对已有的产品或技术进行分析研究,进而对该系统(产品〉进行剖析、重构、 再创造的设计。( ) 18. 在数控设备中,计算机数控装置是设备的核心部分,一般由专用计算机、输入输出接口 以及机床控制器等部分构成。( ) 437
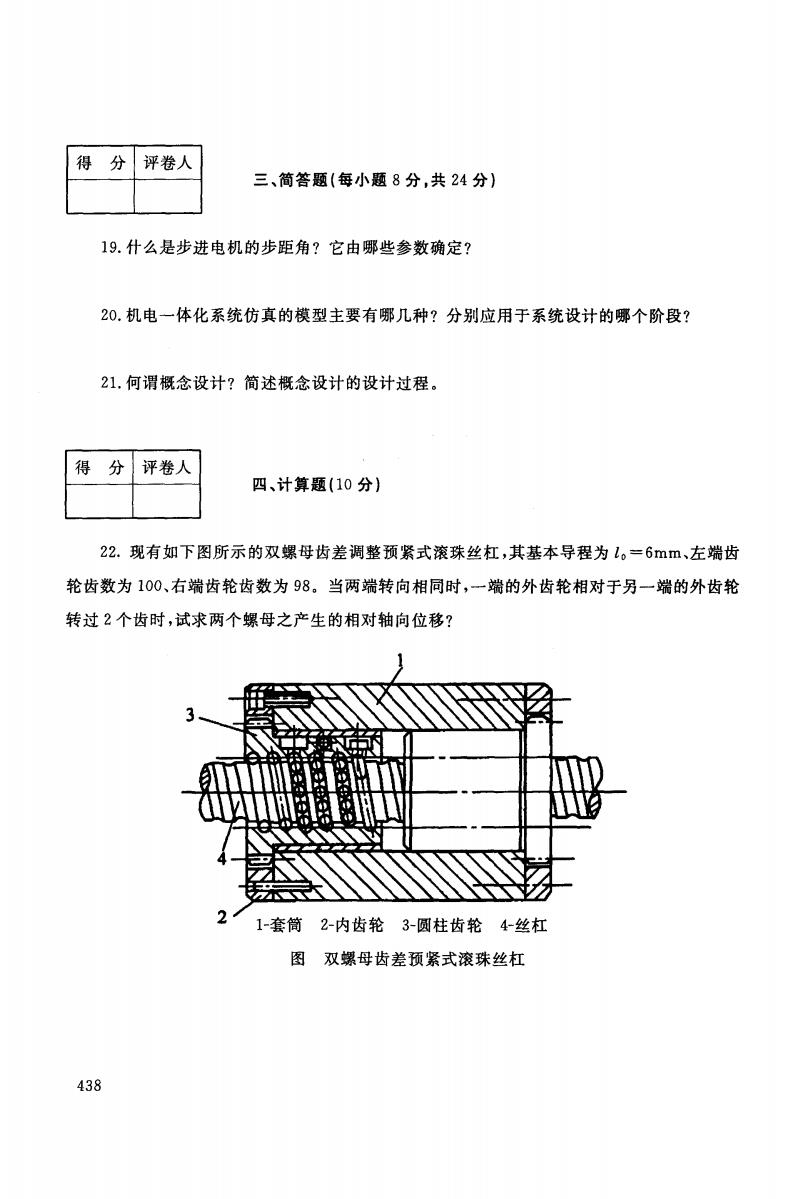
得分 评卷人 三、简答题(每小题8分,共24分)】 19.什么是步进电机的步距角?它由哪些参数确定? 20.机电一体化系统仿真的模型主要有哪几种?分别应用于系统设计的哪个阶段? 21.何谓概念设计?简述概念设计的设计过程。 得 分 评卷人 四、计算题(10分) 22.现有如下图所示的双螺母齿差调整预紧式滚珠丝杠,其基本导程为l。=6mm、左端齿 轮齿数为100、右端齿轮齿数为98。当两端转向相同时,一端的外齿轮相对于另一端的外齿轮 转过2个齿时,试求两个螺母之产生的相对轴向位移? 2 1-套筒2-内齿轮3-圆柱齿轮4丝杠 图双螺母齿差预紧式滚珠丝杠 438
|得分|评卷人| | 三、简答题(每小题 分,共 24 分) 19. 什么是步进电机的步距角?它由哪些参数确定? 20. 机电一体化系统仿真的模型主要有哪几种?分别应用于系统设计的哪个阶段? 1.何谓概念设计?简述概念设计的设计过程。 四、计算题 (10 分} 22. 现有如下图所示的双螺母齿差调整预紧式滚珠丝杠,其基本导程为 lo=6mm 、左端齿 轮齿数为 100 、右端齿轮齿数为 98. 当两端转向相同时,一端的外齿轮相对于另一端的外齿轮 转过 个齿时,试求两个螺母之产生的相对轴向位移? 3 438 2- 内齿轮 3- 圆柱齿轮 4- 丝杠 双螺母齿差预紧式滚珠丝杠

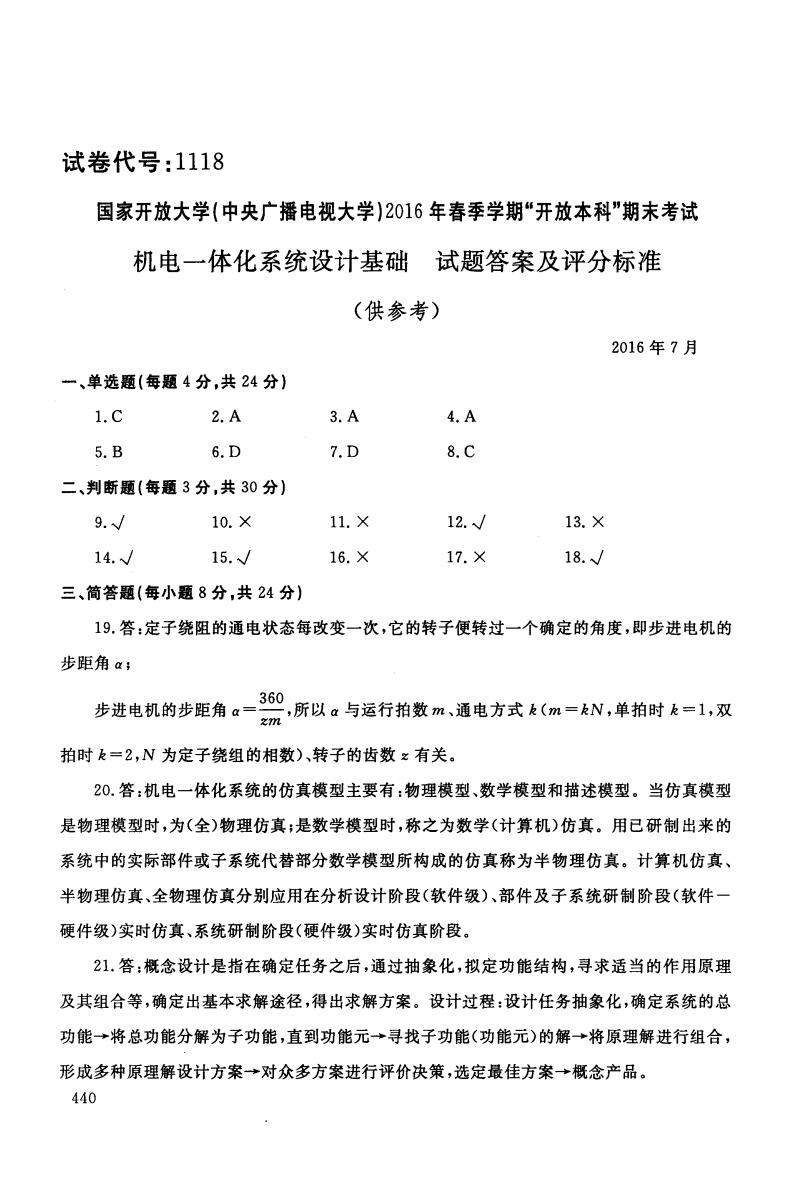
得 分 评卷人 五、综合题(12分) 23.分析图中整体式PLC的各组成部分中CPU、存储器、电源、输入/输出单元的功能。 编程器 存储器 计算机 /o扩 RAM ROM 打印机 外设接口 Jo扩展接口 展单元 CPU 接受 驱动 现场 入单元 输出单元 被控 信号 电源 设备 图 PLC的组成结构框图 439
|得分|评卷人| | 五、综合题(1 分} 23. 分析图中整体式 PLC 的各组成部分中 CPU 、存储器、电源、输入/输出单元的功能。 PLC 的组成结构框图 439
试卷代号:1118 国家开放大学(中央广播电视大学)2016年春季学期“开放本科”期末考试 机电一体化系统设计基础试题答案及评分标准 (供参考) 2016年7月 一、单选题(每题4分,共24分) 1.C 2.A 3.A 4.A 5.B 6.D 7.D 8.C 二、判断题(每题3分,共30分) 9./ 10.× 11.× 12./ 13.× 14./ 15./ 16.× 17.× 18./ 三、简答题(每小题8分,共24分) 19.答:定子绕阻的通电状态每改变一次,它的转子便转过一个确定的角度,即步进电机的 步距角α; 步进电机的步距角。-9,所以。与运行拍数m通电方式(m=么N,单拍时怎=1,双 拍时k=2,N为定子绕组的相数)、转子的齿数x有关。 20.答:机电一体化系统的仿真模型主要有:物理模型、数学模型和描述模型。当仿真模型 是物理模型时,为(全)物理仿真;是数学模型时,称之为数学(计算机)仿真。用已研制出来的 系统中的实际部件或子系统代替部分数学模型所构成的仿真称为半物理仿真。计算机仿真、 半物理仿真、全物理仿真分别应用在分析设计阶段(软件级)、部件及子系统研制阶段(软件一 硬件级)实时仿真、系统研制阶段(硬件级)实时仿真阶段。 21.答:概念设计是指在确定任务之后,通过抽象化,拟定功能结构,寻求适当的作用原理 及其组合等,确定出基本求解途径,得出求解方案。设计过程:设计任务抽象化,确定系统的总 功能→将总功能分解为子功能,直到功能元→寻找子功能(功能元)的解→将原理解进行组合, 形成多种原理解设计方案→对众多方案进行评价决策,选定最佳方案→概念产品。 440
试卷代号 :1118 国家开放大学(中央广播电视大学 )2016 年春季学期"开放本科"期未考试 机电一体化系统设计基础 试题答案及评分标准 (供参考) 2016 一、单选题(每题 分,共 24 分} l. C 2.A 3. A 4.A 5. B 6.D 7.D 8.C 二、判断题(每题 分,共 30 分} 9. .J 10. X 11. X 12. .J 13. X 14. .J 15. .J 16. X 17. X 18. .J 三、简答题{每小题 分,共 24 分} 19. 定子绕阻的通电状态每改变一次,它的转子便转过一个确定的角度,即步进电机的 步距角们 360 步进电机的步距角 α= 一所以 与运行拍数 、通电方式 k(m=kN 单拍时 k=l zm 拍时 k=2 为定子绕组的相数〉、转子的齿数 有关。 20. 答:机电一体化系统的仿真模型主要有 物理模型、数学模型和描述模型。当仿真模型 是物理模型时,为(全〉物理仿真;是数学模型时,称之为数学(计算机〉仿真。用己研制出来的 系统中的实际部件或子系统代替部分数学模型所构成的仿真称为半物理仿真。计算机仿真、 半物理仿真、全物理仿真分别应用在分析设计阶段(软件级)、部件及子系统研制阶段(软件一 硬件级〉实时仿真、系统研制阶段(硬件级)实时仿真阶段。 1.答:概念设计是指在确定任务之后,通过抽象化,拟定功能结构,寻求适当的作用原理 及其组合等,确定出基本求解途径,得出求解方案。设计过程 设计任务抽象化,确定系统的总 功能→将总功能分解为子功能,直到功能元→寻找子功能(功能元)的解→将原理解进行组合, 形成多种原理解设计方案→对众多方案进行评价决策,选定最佳方案→概念产品。 440
18 四、计算题(10分】 22.解:左端外齿轮旋转一周,螺母轴向移动6mm,则每转一个齿,螺母的轴向移动6/100 =0.06mm; 右端外齿轮旋转一周,螺母轴向移动6mm,则每转一个齿,螺母的轴向移动6/98 =0.0612mm; 当两端转向相同时:一端的外齿轮相对于另一端的外齿轮转过1个齿时,相对移动的轴向 距离为0.0612一0.06=0.012(mm),所以当一端的外齿轮相对于另一端的外齿轮转过2个齿 时相对移动的轴向距离为(0.0612一0.06)*2=0.0024(mm)。 a:=nX(-之X1,=2Xg高X0.06mm=24μm 五、综合题(12分) 23.答:(1)中央处理器CPU是PLC的运算和控制核心,控制其它所有部件的运行,功能 相当于人的大脑。(3分) (2)存储器用来存储数据和程序,包括随机存储器(RAM)和只读存储器(ROM),存储系 统程序和用户程序。(3分) (3)输人/输出(I/O)单元是CPU与现场I/O设备或其它外部设备之间的连接部件。(3分) (4)电源包括系统电源和后备电池,其中后备电池可在停电时继续保持几十小时的供电。 (3分) 441
奇剖! 22. 左端外齿轮旋转一周,螺母轴向移动 6mm ,贝则 每转一个齿,螺母的轴向移动 /10O =0.06mm; 右端外齿轮旋转一周,螺母轴向移动 6mm ,则每转一个齿,螺母的轴向移动 6/98 =0.0612mm; 当两端转向相间时 一端的外齿轮相对于另一端的外齿轮转过 个齿时,相对移动的轴向 距离为 0.0612 0.06=0. 012(mm) ,所以当一端的外齿轮相对于另一端的外齿轮转过 个齿 时相对移动的轴向距离为 (0.0612 0.06) 2=0.0024(mm) 1 1 1 1 ~s=nX 一一一 Xl 2X( 一一一一) XO. 06mm=2. 4um ZI z2 .1 "~o-"/"98 100 μ 五、综合题(1 分} 23. 答:(1)中央处理器 CPU PLC 的运算和控制核心,控制其它所有部件的运行,功能 相当于人的大脑。 (3 分〉 (2) 存储器用来存储数据和程序,包括随机存储器 (RAM) 和只读存储器 (ROM) ,存储系 统程序和用户程序。 (3 分〉 (3) 输人/输出 0/0) 单元是 CPU 与现场 1/0 设备或其它外部设备之间的连接部件。 (3 分〉 (4) 电源包括系统电源和后备电池,其中后备电池可在停电时继续保持几十小时的供电。 (3 分〉 441