试卷代号:0991 座位号 国家开放大学(中央广播电视大学)2015年秋季学期“开放本科”期末考试 机电一体化系统设计基础 试题 2016年1月 题 号 三 四 五 总 分 分 数 得 分 评卷人 一、单选题(每小题3分,共24分) 1.机电一体化技术是以( )部分为主体,强调各种技术的协同和集成的综合性技术。 A.自动化 B.电子 C.机械 D.软件 2.导程L。=8mm的丝杠的总质量为6kg,标称直径为40mm,则其转动惯量为() kg·mm2。 A.1200 B.480 C.120 D.48 3.需要消除斜齿轮传动的齿侧间隙,采取( )调整法使得调整过程中能自动补偿齿侧 间隙。 A.偏心套 B.轴向垫片 C.薄片错齿 D.轴向压簧错齿 4.幅频特性和相频特性是模拟式传感器的( )。 A.静态特性指标 B.动态特性指标 C.输入特性参数 D.输出特性参数 72
试卷代号 :0991 座位号 国家开放大学(中央广播电视大学 )2015 年秋季学期"开放本科"期末考试 机电一体化系统设计基础 试题 |题号!一 |分数| 一、单选题(每小题 分,共 24 分) 2016 1.机电-体化技术是以)部分为主体,强调各种技术的协同和集成的综合性技术。 A. 自动化 B.电子 c.机械 D. 软件 2. 导程 Lo =8mm 的丝杠的总质量为 峙,标称直径为 40mm ,则其转动惯量为( kg. mm2 0 A. 1200 B. 480 C.120 D.48 3. 需要消除斜齿轮传动的齿侧间隙,采取调整法使得调整过程中能自动补偿齿侧 间隙。 A. 偏心套 B.轴向垫片 c. 薄片错齿 D.轴向压簧错齿 4. 幅频特性和相频特性是模拟式传感器的)。 A. 静态特性指标 B. 动态特性指标 c.输入特性参数 D. 输出特性参数 72
5.闭环控制的驱动装置中,丝杠螺母机构位于闭环之外,所以它的()。 A.回程误差不影响输出精度,但传动误差影响输出精度 B.传动误差不影响输出精度,但回程误差影响输出精度 C.回程误差和传动误差都不会影响输出精度 D.回程误差和传动误差都会影响输出精度 6.PID控制算法中,积分调节器的主要作用是( )。 A.消除静差 B.加快响应 C.减小振荡 D.提高稳定性 7.不进行参数的变换与调整,仅作为输人/输出的直接接口的是( )。 A.零接口 B.被动接口 C.主动接口 D.智能接口 8.HRGP-1A喷漆机器人中的活塞式液压缸属于系统中的()。 A.能源部分 B.测试传感部分 C.驱动部分 D.执行机构 得分 评卷人 二、判断题(正确的打√,错误的打×,每题3分,共30分) 9.系统论、信息论、控制论是机电一体化技术的理论基础,是机电一体化技术的方法论。 () 10.进行机械系统结构设计时,由于阻尼对系统的精度和快速响应性均产生不利的影响, 因此机械系统的阻尼比ξ取值越小越好。() 11.滚珠丝杠垂直传动时,必须在系统中附加自锁或制动装置。() 12.采用虚拟样机代替物理样机对产品进行创新设计测试和评估,延长了产品开发周期, 增加了产品开发成本,但是可以改进产品设计质量,提高面向客户与市场需求能力。( ) 13.传感器的转换元件是指传感器中能直接感受或响应被测量的部分。() 14.步进电动机的转动惯量越大,同频率下的起动转矩就越小。() 15.脉冲分配器的作用是使步进电机各个绕组的通电顺序按一定规律变化。() 16.一般说来,全物理仿真与计算机仿真相比较,在时间、费用和方便性上都具有明显的优 点,是一种经济、快捷与实用的仿真方法。() 17.现场总线系统采用一对一的设备连线,按控制回路分别进行连接,打破了传统控制系 统的结构形式。() 73
5. 闭环控制的驱动装置中,丝杠螺母机构位于闭环之外,所以它的( )。 A. 回程误差不影响输出精度,但传动误差影响输出精度 B. 传动误差不影响输出精度,但回程误差影响输出精度 c.回程误差和传动误差都不会影响输出精度 D. 回程误差和传动误差都会影响输出精度 6.PID 控制算法中,积分调节器的主要作用是( )。 A.消除静差 B. 加快响应 c.减小振荡 D.提高稳定性 7. 不进行参数的变换与调整,仅作为输入/输出的直接接口的是( )。 A. 零接口 c.主动接口 B. 被动接口 D. 智能接口 8. HRGP-1A 喷漆机器人中的活塞式液压缸属于系统中的( )。 A. 能源部分 B. 测试传感部分 驱动部分 D.执行机构 |得分|评卷人| | | | 二脚题(正确的打.J. 错误的打 X. 每题 分,共 30 分} 9. 系统论、信息论、控制论是机电一体化技术的理论基础,是机电一体化技术的方法论。 ( ) 10. 进行机械系统结构设计时,由于阻尼对系统的精度和快速响应性均产生不利的影响, 因此机械系统的阻尼比 取值越小越好。) 1.滚珠丝杠垂直传动时,必须在系统中附加自锁或制动装置。) 12. 采用虚拟样机代替物理样机对产品进行创新设计测试和评估,延长了产品开发周期, 增加了产品开发成本,但是可以改进产品设计质量,提高面向客户与市场需求能力。) 13. 传感器的转换元件是指传感器中能直接感受或响应被测量的部分。( ) 14. 步进电动机的转动惯量越大,同频率下的起动转矩就越小。) 15. 脉冲分配器的作用是使步进电机各个绕组的通电顺序按一定规律变化。) 16. 一般说来,全物理仿真与计算机仿真相比较,在时间、费用和方便性上都具有明显的优 点,是一种经济、快捷与实用的仿真方法。) 17. 现场总线系统采用一对一的设备连线.按控制回路分别进行连接,打破了传统控制系 统的结构形式。( ) 73
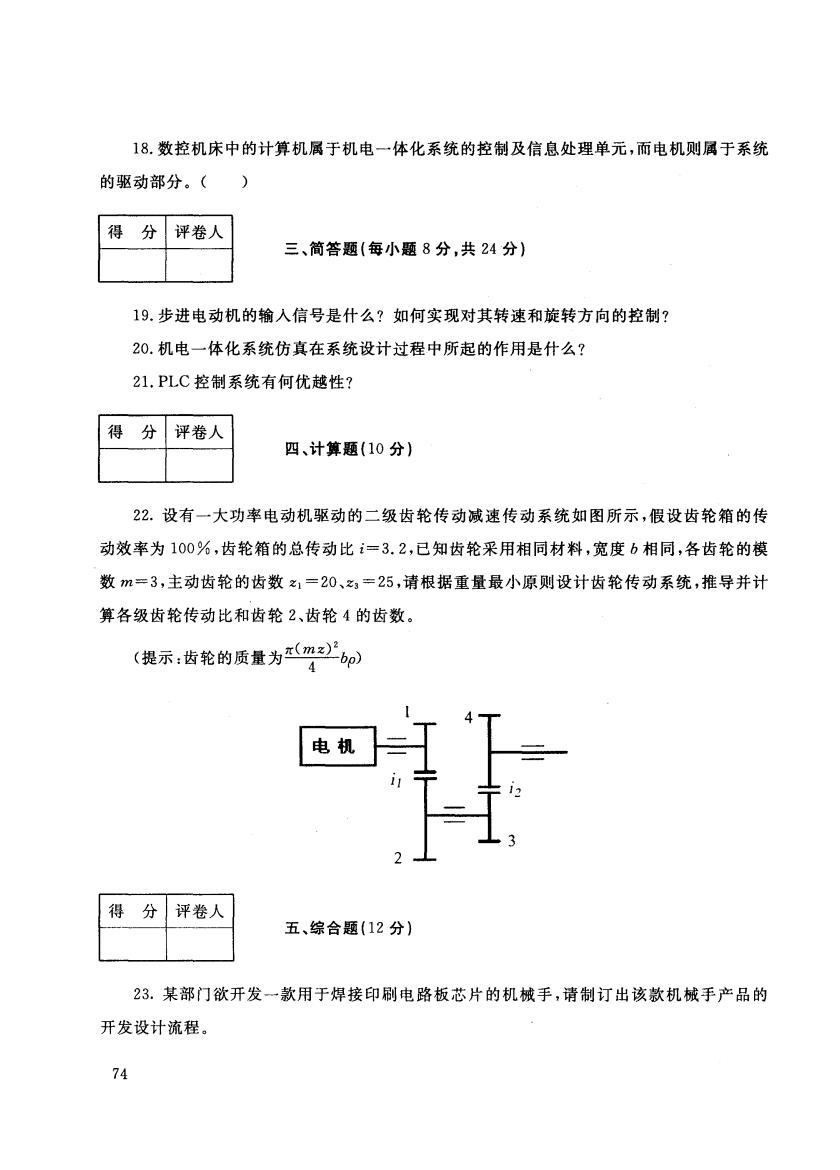
18.数控机床中的计算机属于机电一体化系统的控制及信息处理单元,而电机则属于系统 的驱动部分。() 得 分 评卷人 三、简答题(每小题8分,共24分)】 19.步进电动机的输人信号是什么?如何实现对其转速和旋转方向的控制? 20.机电一体化系统仿真在系统设计过程中所起的作用是什么? 21.PLC控制系统有何优越性? 分 评卷人 四、计算题(10分) 22.设有一大功率电动机驱动的二级齿轮传动减速传动系统如图所示,假设齿轮箱的传 动效率为100%,齿轮箱的总传动比=3.2,已知齿轮采用相同材料,宽度b相同,各齿轮的模 数m=3,主动齿轮的齿数之1=20、z=25,请根据重量最小原则设计齿轮传动系统,推导并计 算各级齿轮传动比和齿轮2、齿轮4的齿数。 (提示:齿轮的质量为(m2bp) 4 得分 评卷人 五、综合题(12分) 23.某部门欲开发一款用于焊接印刷电路板芯片的机械手,请制订出该款机械手产品的 开发设计流程。 74
18. 数控机床中的计算机属于机电一体化系统的控制及信息处理单元,而电机则属于系统 的驱动部分。( ) 三、简答题(每小题 分,共 24 分} 19. 步进电动机的输入信号是什么?如何实现对其转速和旋转方向的控制? 20. 机电一体化系统仿真在系统设计过程中所起的作用是什么? 21. PLC 控制系统有何优越性? |得分|评卷人| | 四、计算题(1 分} 22. 设有一大功率电动机驱动的二级齿轮传动减速传动系统如图所示,假设齿轮箱的传 动效率为 100% ,齿轮箱的总传动比 i=3.2 己知齿轮采用相同材料,宽度 相同,各齿轮的模 m=3 主动齿轮的齿数 Zj =20 Z3 = 25 ,请根据重量最小原则设计齿轮传动系统,推导并计 算各级齿轮传动比和齿轮 、齿轮 的齿数。 (mz)2 (提示:齿轮的质量为一'''4-/ bp) 五、综合题 (12 分) 23. 某部门欲开发一款用于焊接印刷电路板芯片的机械手,请制订出该款机械手产品的 开发设计流程。 74
试卷代号:0991 国家开放大学(中央广播电视大学)2015年秋季学期“开放本科”期末考试 机电一体化系统设计基础 试题答案及评分标准 (供参考) 2016年1月 一、选择题(每题3分,共24分)】 1.c 2.A 3.D 4.B 5.D 6.A 7.A 8.C 二、判断题(正确的打√,错误的打×,每题3分,共30分) 9.√ 10.× 11.√ 12.X 13.× 14./ 15./ 16.× 17.× 18./ 三、简答题(每小题8分,共24分】 19.答:步进电机的输人信号是脉冲序列。步进电机的步矩角α与运行拍数m、通电方式 k(m=k·N,单拍时k=1,双拍时=2,N为定子绕组的相数)、转子的齿数x有关。步进电 机定子绕组通电状态的改变速度越快,其转子旋转的速度越快,即通电状态的变化频率越高, 转子的转速越高。改变步进电机定子绕组的通电顺序,转子的旋转方向随之改变。 20.答:在进行项目的设计和规划时,往往需要对项目的合理性、经济性等品质加以评价; 在系统实际运行前,也希望对项目的实施结果加以预测,以便选择正确、高效的运行策略或提 前消除设计中的缺陷,最大限度地提高实际系统的运行水平。采用仿真技术可以省时、省力、 省钱地达到上述目的。 21.答:PLC主要具有可靠性高、环境适应性强、灵活通用、使用方便、维护简单,PLC提供 标准通信接口,可以方便地构成PLC-PLC网络或计算机-PIC网络,PLC应用程序的编制和 调试非常方便,PLC具有监控功能。 四、计算题(10分) 22.解:设一级齿轮的传动比为i1,第二级齿轮的传动比2。 齿轮传动系统的总重量:M=bm[(受)+(受)2+(受)+(受) 75
试卷代号 :0991 国家开放大学(中央广播电视大学 )2015 年秋季学期"开放本科"期未考试 机电一体化系统设计基础 试题答案及评分标准 一、选择题{每题 分,共 24 分} 1. C 5. D 2. A 6. A (供参考) 3. D 7.A 4. B 8. C 二、判断题{正确的打.J. 错误的打 ,每题 分,共 30 分} 9. .J 14. .J 10. X 15. .J 三、简答题{每小题 分,共 24 分) 11. .J 16. X 12. X 17. X 2016 13. X 18. .J 19. 答:步进电机的输入信号是脉冲序列。步进电机的步矩角 与运行拍数 、通电方式 k(m=k. ,单拍时 k=l 双拍时是 =2 为定子绕组的相数〉、转子的齿数 有关。步进电 机定子绕组通电状态的改变速度越快,其转子旋转的速度越快,即通电状态的变化频率越高, 转子的转速越高。改变步进电机定子绕组的通电顺序,转子的旋转方向随之改变。 20. 答:在进行项目的设计和规划时,往往需要对项目的合理性、经济性等品质加以评价; 在系统实际运行前,也希望对项目的实施结果加以预测,以便选择正确、高效的运行策略或提 前消除设计中的缺陷,最大限度地提高实际系统的运行水平。采用仿真技术可以省时、省力、 省钱地达到上述目的。 1.答 :PLC 主要具有可靠性高、环境适应性强、灵活通用、使用方便、维护简单, PLC 提供 标准通信接口,可以方便地构成 PLC-PLC 网络或计算机-凹>C 网络, PLC 应用程序的编制和 调试非常方便, PLC 具有监控功能。 四、计算题(1 分) 22. 解:设一级齿轮的传动比为白,第二级齿轮的传动比 l2 0 齿轮传动系统的总重量 :M= [(亏 )2+( )2 + (亏 )2+(~4)2J 75
则M=[1+)++货)力] 4 根据重量最小原则,令=0,得: ai i-√g-√层i-2i=8.22=1.6 则:x2=40、x,=40 五.综合题(12分) 23.解:机电一体化系统的主要设计流程分为五个阶段:产品规划、概念设计、详细设计、 设计实施和设计定型阶段。(2分) 第一阶段:产品规划阶段。进行需求分析和需求设计,以明确设计任务。例如: 机械手的用途:焊接芯片。 工作方式:手动、自动方式。 主要技术参数:3自由度等等。 使用环境要求:生产线。(2分) 第二阶段:概念设计阶段。在功能分析的基础上,优化筛选取得较理想的工作原理方案。 (2分) 第三阶段:详细设计阶段。对各功能模块进行细部设计,绘制相应的工程图。该阶段的工 作量既包括机械、电气、电子、控制与计算机软件等系统的设计,又包括总装图和零件图的绘 制。(2分) 第四阶段:设计实施阶段。首先根据机械、电气图纸和算法文件,制造、装配和编制各功能 模块;然后进行模块的调试;最后进行系统整体的安装调试,复核系统的可靠性及抗干扰性。 (2分) 第五阶段:设计定型阶段。对调试成功的系统进行工艺定型,整理设计资料。小批量生 产、试销。(2分) 76
M= 呼气Z!2 (1 +i! 2) + Z3 2 (1 + C~ J 2J ] 根据重量最小原则,令丁-:==0. cll \=在=Zzk :Z2 =40 z4=40 五.综合题 (12 分} 23. 解:机电一体化系统的主要设计流程分为五个阶段:产品规划、概念设计、详细设计、 设计实施和设计定型阶段。 (2 分) 第一阶段:产品规划阶段。进行需求分析和需求设计,以明确设计任务。例如: 机械手的用途:焊接芯片。 工作方式:手动、自动方式。 主要技术参数 :3 自由度等等。 使用环境要求:生产线。 (2 分) 第二阶段:概念设计阶段。在功能分析的基础上,优化筛选取得较理想的工作原理方案。 (2 分) 第三阶段:详细设计阶段。对各功能模块进行细部设计,绘制相应的工程图。该阶段的工 作量既包括机械、电气、电子、控制与计算机软件等系统的设计,又包括总装图和零件图的绘 制。 (2 分) 第四阶段:设计实施阶段。首先根据机械、电气图纸和算法文件,制造、装配和编制各功能 模块;然后进行模块的调试;最后进行系统整体的安装调试,复核系统的可靠性及抗干扰性。 (2 分) 第五阶段:设计定型阶段。对调试成功的系统进行工艺定型,整理设计资料。小批量生 产、试销。 (2 分) 76