试卷代号:1118 座位号■■ 国家开放大学(中央广播电视大学)2014年秋季学期“开放本科”期末考试 机电一体化系统设计基础试题 2015年1月 题 号 二 三 四 五 总 分 分 数 得分 评卷人 一、单选题(每小题3分,共24分】 1.以下产品不属于机电一体化产品的是( )。 A.工业机器人 B.打印机 C.全自动洗衣机 D.电子计算机 2.为提高机电一体化机械传动系统的固有频率,应设法()。 A,增大系统刚度 B.增大系统转动惯量 C.增大系统的驱动力矩 D.减小系统的摩擦阻力 3.幅频特性和相频特性是模拟式传感器的()。 A.静态特性指标 B.动态特性指标 C.输人特性参数 D.输出特性参数 4。在开环控制系统中,常用( )做驱动元件。 A,直流伺服电动机 B.步进电动机 C.同步交流伺服电动机 D.异步交流伺服电动机 5.有一脉冲电源,通过环形分配器将脉冲分配给五相十拍通电的步进电机定子励磁绕 组,已知转子有24个齿,步进电机的步距角是( A.0.6 B.1.2 C.1.5° D.2° 518
试卷代号 :1118 座位号 国家开放大学(中央广播电视大学)2014 年秋季学期"开放本科"期末考试 机电一体化系统设计基础 试题 一、单选题(每小题 分,共 24 分) 1.以下产品不属于机电一体化产品的是( )。 A. 工业机器人 B. 打印机 c. 全自功洗衣机 D. 电子计算机 2. 为提高机电一体化机械传动系统的固有频率,应设法( )。 A.增大系统刚度 B. 增大系统转动惯量 c. 增大系统的驱动力矩 D.减小系统的摩擦阻力 3. 幅频特性和相频特性是模拟式传感器的( A. 静态特性指标 B. 动态特性指标 c.输入特性参数 4. 在开环控制系统中,常用( A. 直流伺服电动机 D.输出特性参数 )做驱动元件。 B.步进电动机 c.同步交流伺服电动机 D. 异步交流伺服电动机 2015 5. 有一脉冲电掘,通过环形分配器将脉冲分配给五相十拍通电的步进电机定子励磁绕 组,已知转子有 24 个齿,步进电机的步距角是( )。 A.0.60 B.1.2 c. 1. 50 D.2 518

6.含有微处理器,可进行程序编制或适应条件变化的接口是( )。 A.零接口 B.被动接口 C.主动接口 D.智能接口 7.HRGP-1A型喷漆机器人中的活塞式液压缸属于系统中的()。 A.能源部分 B.测试传感部分 C.驱动部分 D.执行机构 8.通常,数控精密镗铣床等高精度数控设备,其同服系统的控制方式均采用( )。 A.开环控制 B.闭环控制 C.半闭环控制 D.混合控制 得 分 评卷人 二、判断题(正确的打√,错误的打X,每题3分,共30分)】 9.一个较完善的机电一体化系统,应包括以下几个基本要素:机械本体、动力系统、检测 传感系统及执行部件,各要素和环节之间通过接口相联系。() 10.进行机械系统结构设计时,由于阻尼对系统的精度和快速响应性均产生不利的影响, 因此机械系统的阻尼比取值越小越好。() 11.在滚珠丝杠螺母间隙的调整结构中,齿差式调隙机构的精度较高,且结构简单,制作 成本低。() 12.选择传感器时,如果测量的目的是进行定性分析,则选用绝对量值精度高的传感器, 而不宜选用重复精度高的传感器。() 13.对直流伺服电动机来说,其机械特性越硬越好。() 14.无论采用何种控制方案,系统的控制精度总是高于检测装置的精度。() 15.半物理仿真和全物理仿真都有实物介入,且具有构成复杂、造价高、准备时间长等缺 点。() 16.现场总线系统采用一对一的设备连线,按控制回路分别进行连接,打破了传统控制系 统的结构形式。() 17.绿色设计是对已有的产品或技术进行分析研究,进而对该系统(产品)进行剖析、重 构、再创造的设计。() 18.在数控设备中,计算机数控装置是设备的核心部分,一般由专用计算机(或通用计算 机)、输入输出接口以及机床控制器等部分构成。() 519
6. 含有微处理器,可进行程序编制或适应条件变化的接口是( )。 A. 零接口 c.主动接口 B. 被动接口 D. 智能接口 7. HRGP-1A 型喷漆机器人中的活塞式液压缸属于系统中的( )。 A. 能源部分 B. 测试传感部分 c.驱动部分 D. 执行机构 8. 通常,数控精密键就床等高精度数控设备,其伺服系统的控制方式均采用( )。 A. 开环控制 C. 半闭环控制 |得分|评卷人| | B.闭环控制 D.混合控制 二、判断题(正确的打.j, 错误的打 ,每题 分,共 30 分) 9. 一个较完善的机电一体化系统,应包括以下几个基本要素:机械本体、动力系统、检测 传感系统及执行部件,各要素和环节之间通过接口相联系。( ) 10. 进行机械系统结构设计时,由于阻尼对系统的精度和快速响应性均产生不利的影响, 因此机械系统的阻尼比 取值越小越好。( ) 1.在滚珠丝杠螺母间隙的调整结构中,齿差式调隙机构的精度较高,且结构简单,制作 成本低。( ) 12. 选择传感器时,如果测量的目的是进行定性分析,则选用绝对量值精度高的传感器, 而不宜选用重复精度高的传感器。( ) 13. 对直流伺服电动机来说,其机械特性越硬越好。( ) 14. 无论采用何种控制方案,系统的控制精度总是高于检测装置的精度。( ) 15. 半物理仿真和全物理仿真都有实物介入,且具有构成复杂、造价高、准备时间长等缺 点。( ) 16. 现场总线系统采用一对一的设备连线,按控制回路分别进行连接,打破了传统控制系 统的结构形式。( ) 17. 绿色设计是对已有的产品或技术进行分析研究,进而对该系统(产品)进行剖析、重 构、再创造的设计。( ) 18. 在数控设备中,计算机数控装置是设备的核心部分,一般由专用计算机(或通用计算 机)、输入输出接口以及机床控制器等部分构成。( ) 519
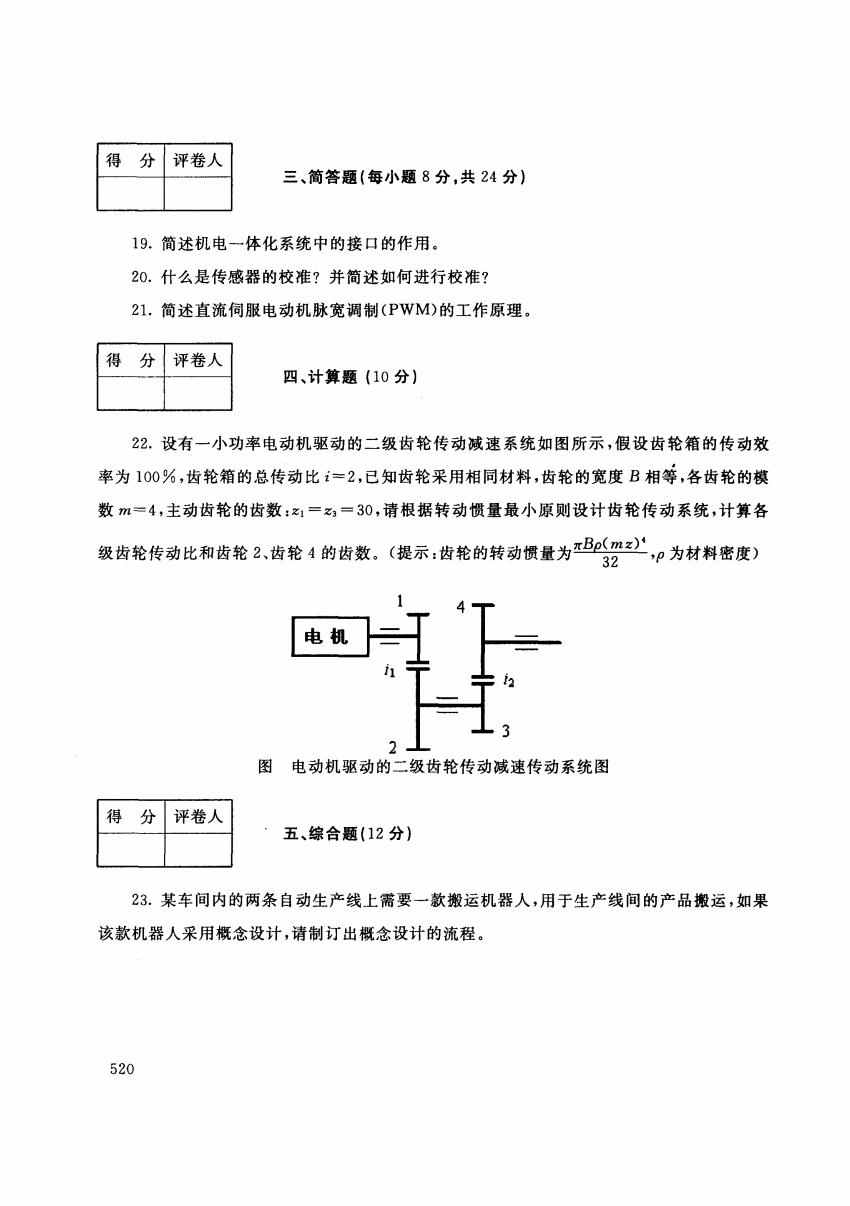
得分 评卷人 三、简答题(每小题8分,共24分)】 19.简述机电一体化系统中的接口的作用。 20.什么是传感器的校准?并简述如何进行校准? 21.简述直流伺服电动机脉宽调制(PWM)的工作原理。 得 分 评卷人 四、计算题(10分) 22.设有一小功率电动机驱动的二级齿轮传动减速系统如图所示,假设齿轮箱的传动效 率为100%,齿轮箱的总传动比=2,已知齿轮采用相同材料,齿轮的宽度B相等,各齿轮的模 数m=4,主动齿轮的齿数:名1==30,请根据转动惯量最小原则设计齿轮传动系统,计算各 级齿轮传动比和齿轮2,齿轮4的齿数。(提示:齿轮的转动惯量为B2心,p为材料密度) 图电动机驱动的二级齿轮传动减速传动系统图 得 分 评卷人 五、综合题(12分) 23.某车间内的两条自动生产线上需要一款搬运机器人,用于生产线间的产品搬运,如果 该款机器人采用概念设计,请制订出概念设计的流程。 520
|得分|评卷人| | 三、简答题(每小题 分,共 24 分) 19. 简述机电一体化系统中的接口的作用。 20. 什么是传感器的校准?并简述如何进行校准? 1.简述直流伺服电动机脉宽调制 (PWM) 的工作原理。 |得分|评卷人| | 四、计算题{l 分) 22. 设有一小功率电动机驱动的二级齿轮传动减速系统如图所示,假设齿轮箱的传动效 率为 100% ,齿轮箱的总传动比 i=2 已知齿轮采用相同材料,齿轮的宽度 相等,各齿轮的模 m=4 主动齿轮的齿数 :z =z3=30 请根据转动惯量最小原则设计齿轮传动系统,计算各 πBρ (mz)4 级齿轮传动比和齿轮 、齿轮 的齿数。(提71\:齿轮的转功惯量为出它丘, 为材料密度) 电动机驱动的二级齿轮传动减速传动系统图 五、综合题 (12 分} 23. 某车间内的两条自动生产线上需要一款搬运机器人,用于生产线间的产品搬运,如果 该款机器人采用概念设计,请制订出概念设计的流程。 520
试卷代号:1118 国家开放大学(中央广播电视大学)2014年秋季学期“开放本科”期末考试 机电一体化系统设计基础试题答案及评分标准 (供参考) 2015年1月 一、选择题(每题3分,共24分) 1.D 2.A 3.B 4.B 5.C 6.D 7.C 8.B 二、判断题(每题3分,共30分) 9.× 10.× 11.× 12.× 13./ 14.× 15./ 16.× 17.× 18./ 三、简答题(每小题8分,共24分) 19.答:从系统外部来看,接口连接机电一体化系统与人、环境或其他系统;从系统内部来 看,通过许多接口将机电一体化系统各组成要素的连接起来。接口主要完成电平转换、信号隔 离、放大、滤波、速度匹配等。 20.答:传感器在使用前、使用中或搁置一段时间再使用时必须对其性能参数进行复测或 做必要的调整和修正,以确保传感器的测量精度,这个复测调整过程称为校准。 为了对传感器有一个长期的、稳定的和高精度的基准,在一些测量仪器中特别是内部装有 微处理器的测量仪器中,很容易实现自动校准功能。对传感器进行校准时,需要精度比它高的 基准器,这种基准器受时间的推移和使用的磨损等因素的影响,参数会随之改变。因此对这种 基准器还要用更高精度的基准器来定期校准。 21.答:假设输人直流电压U,可以调节导通时间得到一定宽度的与U成比例的脉冲方波 给伺服电动机电枢回路供电,通过改变脉冲宽度来改变电枢回路的平均电压,从而输出不同大 小的电压U。,使直流电动机平滑调速。 四、计算题(10分) 22.解:设一级齿轮的传动比为i1,第二级齿轮的传动比i2,其中i2=/i1。 转挨到电机轴的齿轮惯量为:J=J十士出十文 其中=小=2d小=J小,=J=J( 所以人+山++ 11 好() =.1++是+第 521
试卷代号 :1118 国家开放大学(中央广播电视大学 )2014 年秋季学期"开放本科"期末考试 机电一体化系统设计基础 试题答案及评分标准 -、选择题{每题 分,共 24 分} 1. D 2. A 5. C 6. D 二、判断题(每题 分,共 30 分} (供参考) 3. B 7. C 4. B 8. B 9. X 10. X 11. X 12. X 13. .J 14. X 15. .J 16. X 17. X 18. .J 三、简答题(每小题 分,共 24 分} 2015 19. 答:从系统外部来看,接口连接机电一体化系统与人、环境或其他系统;从系统内部来 看,通过许多接口将机电一体化系统各组成要素的连接起来。接口主要完成电平转换、信号隔 离、放大、滤波、速度匹配等。 20. 答:传感器在使用前、使用中或搁置一段时间再使用时必须对其性能参数进行复测或 做必要的调整和修正,以确保传感器的测量精度,这个复测调整过程称为校准。 为了对传感器有一个长期的、稳定的和高精度的基准,在一些测量仪器中特别是内部装有 微处理器的测量仪器中,很容易实现自动校准功能。对传感器进行校准时,需要精度比它高的 基准器,这种基准器受时间的推移和使用的磨损等因素的影响,参数会随之改变。因此对这种 基准器还要用更高精度的基准器来定期校准。 1.答 假设输入直流电压 可以调节导通时间得到→定宽度的与 成比例的脉冲方波 给伺服电动机电枢回路供电,通过改变脉冲宽度来改变电枢回路的平均电压,从而输出不同大 小的电压叭,使直流电动机平滑调速。 四、计算题(1 分} 22. 解:设一级齿轮的传动比为 11 第二级齿轮的传动比马,其中 =i/ 句。 I • T 3 I J 4 转换到电机轴的齿轮惯量为: 1me=J1+ 气「+否 其中 JI=J3==EEEd4J-J i4J =J t4=Jl(τ~ )4 32 u1 h z l T 1 i1 十[川去)4 1iz 所以 1me=J 一气 一+一-"-;1-=110+ii+ 万+泸 i~ (-:~-y L] 521

根据转动惯量最小原则,令=0,可求得:=√ +1 当站>1时,可简化为三,=1,14,=名=招 五、综合题(12分) 23.答:产品概念设计决定性地影响产品创新过程中后续的产品详细设计、产品生产开 发、产品市场开发以及企业经营战略目标的实现。包含以下流程: (1)首先是将设计任务抽象化,确定出系统的总功能: (2)根据系统的总功能要求和构成系统的功能要素进行总功能分解,划分出各功能模块, 将总功能分解为子功能,直到分解到不能再分解的功能元,形成功能树:确定它们之间的逻辑 关系; (3)对各功能模块输入/输出关系进行分析,确定功能模块的技术参数和控制策略、系统的 外观造型和总体结构; (4)寻找子功能(功能元)的解,并将原理解进行组合,形成多种原理解设计方案; (5)以技术文件的形式交付设计组讨论、审定。由于体现同一功能的产品可以有多种多样 的工作原理; (6)方案进行整体评价:对不同的方案进行整体评价,选择综合指标最优的设计方案。最 终选定最佳方案形成概念产品。 明确设计任务 分析 求总功能 黑箱法 总功能分解 功能逐级分解 寻找子功能解 创造性方法、目录法、 调查分析法 综合 原理解组合 形态学矩阵法 评价与决策 各种评价方法 评价 决策 概念产品 图概念设计的步骤及采用的方法 (注:绘制出流程图或文字作答均可。) 522
根据转动惯量最小原则,令骂了与 ,可求得 :i if>l 时,可简化为→,时句 =z 42 五、综合题(1 分} 23. 答:产品概念设计决定性地影响产品创新过程中后续的产品详细设计、产品生产开 发、产品市场开发以及企业经营战略目标的实现。包含以下流程 (1)首先是将设计任务抽象化,确定出系统的总功能 (2) 根据系统的总功能要求和构成系统的功能要素进行总功能分解,划分出各功能模块, 将总功能分解为子功能,直到分解到不能再分解的功能元,形成功能树;确定它们之间的逻辑 关系; (3) 对各功能模块输入/输出关系进行分析,确定功能模块的技术参数和控制策略、系统的 外观造型和总体结构; (4) 寻找子功能(功能元)的解,并将原理解进行组合,形成多种原理解设计方案; (5) 以技术文件的形式交付设计组讨论、审定。由于体现同一功能的产品可以有多种多样 的工作原理; (6) 方案进行整体评价:对不同的方案进行整体评价,选择综合指标最优的设计方案。最 终选定最佳方案形成概念产品。 分析 (Å -"、口 评价 决策 黑箱法 功能逐级分解 创造性方法、目录法、 调查分析法 形态学矩阵法 各种评价方法 概念设计的步骤及采用的方法 (注:绘制出流程图或文字作答均可。) 522