试卷代号:1118 座位号■口 国家开放大学(中央广播电视大学)2014年春季学期“开放本科”期末考试 机电一体化系统设计基础 试题 2014年7月 题号 三 四 五 总 分 分 数 得 分 评卷人 一、单选题(每小题3分,共24分) 1.以下产品不属于机电一体化产品的是()。 A.机器人 B.移动电话 C.数控机床 D.复印机 2.以下哪一项措施不能诚小机械系统的传动误差?() A.提高零部件本身的精度 B.合理设计传动链 C.减小零部件的质量 D.采用消隙机构 3。下列哪种方法是采用单螺母预紧原理来消除滚珠丝杠副的间隙?() A.螺纹调隙式 B.双螺母垫片调隙式 C.齿差调隙式 D.偏置导程法 4.有一脉冲电源,通过环形分配器将脉冲分配给五相十拍通电的步进电机定子励磁绕 组,已知转子有24个齿,步进电机的步距角是()。 A.0.6° B.1.2° C.1.5° D.2 5.计算机控制系统实际运行时,需要由用户自行编写( ),具有实时性、针对性、灵活 性和通用性。 A.嵌人软件 B.应用软件 C.开发软件 D.系统软件 519
试卷代号 座位号 国家开放大学(中央广播电视大学 4年春季学期"开放本科"期末考试 机电一体化系统设计基础试题 2014 年7 |题号|一|二|三|四|五|总分| |分数 I I I I I I |得分|评卷人| -、单选题{每小题 2 4 I I I 1.以下产品不属于机电一体化产品的是( )。 A.机器人 .移动电话 c. 控机床 2. 下哪一项 不能减小机械 ( ) A. 零部件本 度B. 合理设计传 c. 部件 质量 采用 3. 哪种 单螺母预 除滚珠丝 的 间 ( ) A.螺纹调隙式 .双螺母垫片调隙式 c.齿差调隙式 .偏置导程法 4. 一脉 环形 将 脉 拍 通 电 的 机定子励磁 组,已知转子有 4个齿,步进电机的步距角是( )。 A.O.6 C. 1. B. 1. 0. 5. 际运 需要 编 写 ) ,具有实时性、针对性、灵活 性和通用性。 A.嵌入软件 .应用软件 c. 软件 519
6.以下抑制电磁干扰的措施,除了(),其余都是从切断传播途径人手。 A.屏蔽 B.隔离 C.滤波 D.软件抗干扰 7.( )的主要手段是建立系统数学模型,在计算机上确定出最佳的设计参数和系统结 构,提高产品的设计水平。 A.优化设计 B.可靠性设计 C.反向设计 D.绿色设计 8.SCARA机器人是指具有选择顺应性的装配机器人手臂,它在 方向上具有顺 应性,而在 方向具有很大的刚性,因而最适合装配作业使用。() A.水平旋转 B.水平垂直 C.垂直水平 D.旋转垂直 得 分 评卷人 二、判断题(正确的打√,错误的打×,每题3分,共30分) 9.信息处理技术是指在机电一体化产品工作过程中,与工作过程各种参数和状态以及自 动控制有关的信息输人、识别、变换、运算、存储、输出和决策分析等技术。() 10.系统的静摩擦阻尼越大,使系统的回程误差增大,定位精度降低。() 11.采用虚拟样机代替物理样机对产品进行创新设计测试和评估,延长了产品开发周期, 增加了产品开发成本,但是可以改进产品设计质量,提高面向客户与市场需求能力。() 12.迟滞是传感器的一种动态误差,是由于在传感器的正反行程中的输出输人特性曲线 不重合引起的。() 13.气压同服系统的过载能力强,在大功率驱动和高精度定位时性能好,适合于重载的高 加减速驱动。() 14.脉冲分配器的作用是使步进电动机绕组的通电顺序按一定规律变化。() 15.仿真根据采用的模型可以分为计算机仿真、半物理仿真和全物理仿真。() 16.计算机控制系统的采样周期越小,其控制精度就越高。() 17.概念设计是指在确定任务之后,通过抽象化,拟定功能结构,寻求适当的作用原理及 其组合等,确定出基本求解途径,得出求解方案。() 18.数控机床中的计算机属于机电一体化系统的控制及信息处理单元,而电机则属于系 统的驱动部分。() 520
6. 下抑制 干扰 ) ,其余都是从切断传播途径入手。 A. 蔽B. C. 披D. 抗于扰 7. ( )的主要手段是建立系统数学模型,在计算机上确定出最佳的设计参数和系统结 构,提高产品的设计水平。 A. 计B. 设计 C. 计D. 8. SCARA 器人是 顺应 手臂 具有顺 应性,而在一一一一方向具有很大的刚性,因而最适合装配作业使用. ( ) A. 转B.水平 C. 平D. 转 垂 |得分|评卷人| I I I 二、判断题{正确的打.J .错误的打 .每题 3分.共 0分} 9. 技术 在机 体化 工作过程 工作过 各种参数 动控制有关的信息输入、识别、变换、运算、存储、输出和决策分析等技术。( ) 10. 程误差增大 度降低 ) 1. 用虚拟样机 评估 延长 增加了产品开发戚本,但是可以改进产品设计质量,提高面向客户与市场需求能力。( ) 12. 迟滞是传感器 一种动态 于在 不重合引起的。( ) 13. 力强 动和高精度定 加减速驱动。( ) 14. 配器 使步 机绕组 一定规律 ) 15. 据采 理仿真和 理仿 ) 16. 机控 采样 度就 ) 17. 概念 指在 任务 通过 象化 定功 寻求 用 原理及 其组合等,确定出基本求解途径,得出求解方案。( ) 18. 数控机 及信 处理 统的驱动部分。( ) 520
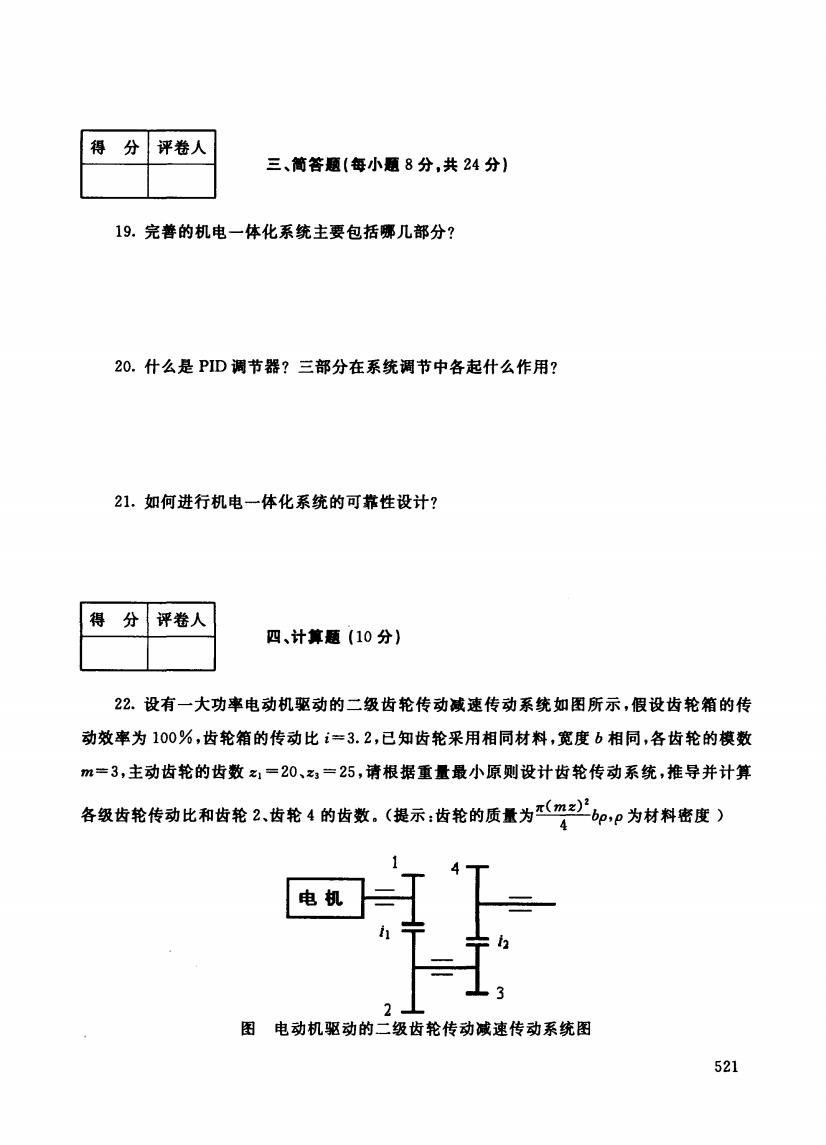
得分 」评卷人 三、简答题(每小题8分,共24分) 19.完善的机电一体化系统主要包括哪几部分? 20.什么是PID调节器?三部分在系统调节中各起什么作用? 21.如何进行机电一体化系统的可靠性设计? 得 分 评卷人 四、计算题(10分) 22.设有一大功率电动机驱动的二级齿轮传动减速传动系统如图所示,假设齿轮箱的传 动效率为100%,齿轮箱的传动比=3.2,已知齿轮采用相同材料,宽度b相同,各齿轮的模数 m=3,主动齿轮的齿数1=20、3=25,请根据重量最小原则设计齿轮传动系统,推导并计算 备级齿轮传动比和齿轮2.齿轮4的齿数。(提示:齿轮的质量为型p,®为材料密度) 电机 图电动机驱动的二级齿轮传动减速传动系统图 521
|得分|评卷人| I I I 三、筒答题{每小题 8分,共 4分} 19. 要包 部分 20. 因D 三部 作用 1. 行机 性设 |得分|评卷人| I I I 四、计算题(1 0分} 22. 二级齿轮传 轮箱 动效率为 %,齿轮箱的传动比 ,己知齿轮采用相同材料,宽度 b相同,各齿轮的模数 m=3 齿轮 =25 请根 量最小原则设计 轮传 导并 各级齿轮传动比和齿轮 2、齿轮 4的齿数。(提京 z齿轮的质量为.一一句 p为材料密度〉 11 图电动机驱动的二级齿轮传动减速传动系统图 521
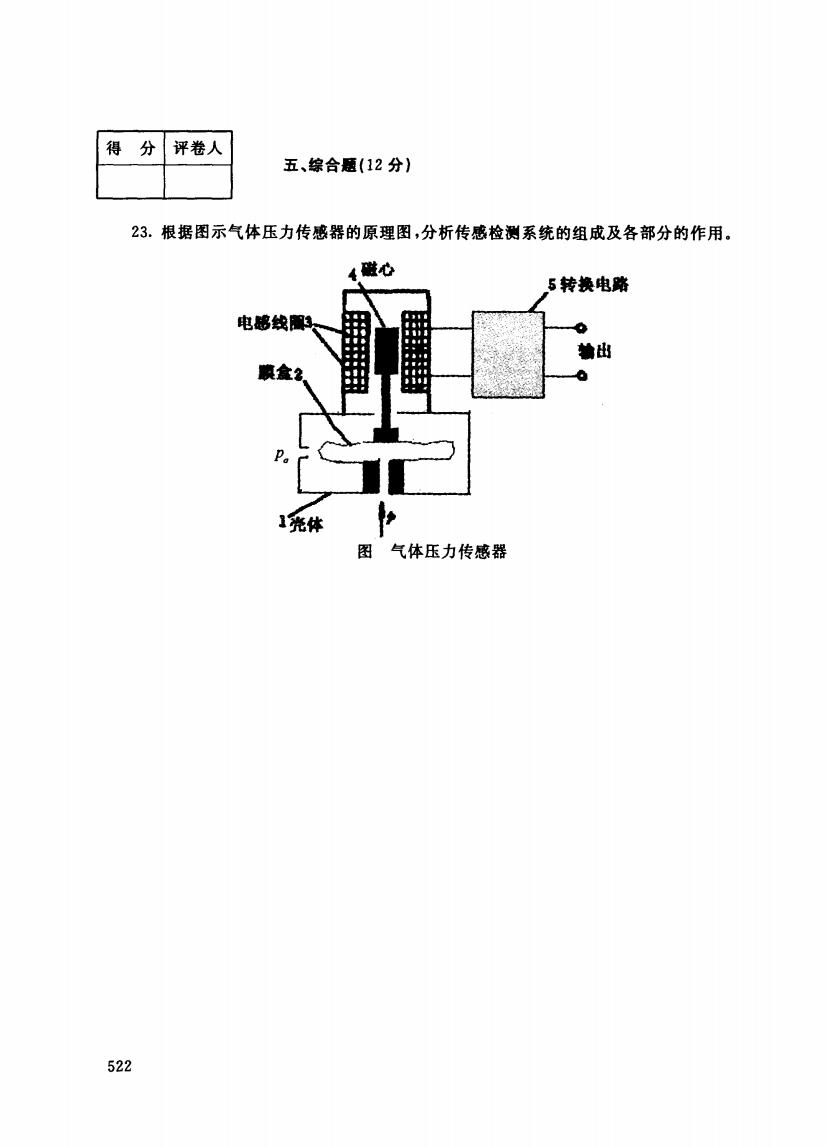
得分 评卷人 五、综合题(12分) 23.根据图示气体压力传感器的原理图,分析传感检测系统的组成及各部分的作用。 ,磁心 5转换电路 电线黑3 输出 盒2 1亮体 图气体压力传感器 522
|得分|评卷人| I I I 五、综合题(l 23. 根据 体压 传感 析传 组成及各 522
试卷代号:1118 国家开放大学(中央广播电视大学)2014年春季学期“开放本科”期末考试 机电一体化系统设计基础 试题答案及评分标准 (供参考) 2014年7月 一、选择题(每题3分,共24分】 1.B 2.C 3.D 4.C 5.B 6.D 7.A 8.B 二、判断题(每题3分,共30分) 9./ 10./ 11.X 12.× 13.× 14.√ 15./ 16.X 17./ 18./ 三、简答题(每小题8分,共24分) 19.答:机电一体化系统主要由机械本体、动力系统、检测传感系统、执行部件和信息处理 及控制系统五部分相互协调,共同完成所规定的目的功能。通过接口及相应软件有机结合在 一起,构成内部匹配合理、外部效能最佳的完整产品。 20.答:按偏差的比例、积分和微分进行控制的调节器,将偏差的比例、积分、微分通过线 性组合构成控制量,简称为P(比例)I(积分)D(微分)调节器,是连续系统中技术成熟、应用最 为广泛的一种调节器。 (1)PID调节器中比例调节起纠正偏差的作用,其反应迅速; (2)积分调节能消除静差,改善系统静态特性; (3)微分调节有利于减少超调,加快系统的过渡过程。 21.答:机电一体化系统的可靠性设计包括机械系统和控制系统的可靠性设计。 机械系统的可靠性设计:(1)缩短传动链,减少元件数;(2)必要时增设备用元件或系统: (3)简化结构:(4)增加过载保护装置、自动停机装置:(5)设置监控系统;(6)合理规定维修期。 控制系统可靠性设计:(1)自动控制;(2)通过元器件的合理选择提高可靠性;(3)对功率接 口采用降额设计提高可靠性;(4)采用监视定时器提高可靠性;(5)采取抗干扰措施提高可靠 性。 523
试卷代号 1 1 国家开放大学(中央广播电视大学 2 0 4年春季学期"开放本科"期末考试 机电一体化系统设计基础试题答案及评分标准 〈供参考) 2014 年7 一、选择题{每题 3分,共 4分} 1. B 2. C 5. B 6.D 3. D 7.A 4. C 8. B 二、判断题{每题 3分,共 0分} 9. .J 10. .J 11. X 12. X 13. X 14. .J 15. .J 16. X 17. .J 18. .J 三、简答题{每小题 8分,共 4分} 19. 机械 测传 执行部件 处理 及控制系统五部分相互协调,共同完成所规定的目的功能。通过接口及相应软件有机结合在 一起,构成内部匹配合理、外部效能最佳的完整产品. 20. 偏差 性组合构成控制量,简称为 (比例)I(积分 (微分〉调节器,是连续系统中技术成熟、应用最 为广泛的一种调节器。 (1 ID调节器中比例调节起纠正偏差的作用,其反应迅速 (2) 调节 改善 统静 特性 (3) 微分调节 减少 过程 1. 靠性 包括机 可靠性 机械系统的可靠性设计: (1)缩短传动链,减少元件数 )必要时增设备用元件或系统 (3) 结构 过载 置;(5) 设置监 理规定维修 控制系统可靠性设计:(1)自动控制 )通过元器件的合理选择提高可靠性刊 )对功率接 口采用降额设计提高可靠性刊的采用监视定时器提高可靠性刊 )采取抗干扰措施提高可靠 性。 523

四、计算题(10分)】 22.解:设一级齿轮的传动比为i1,第二级齿轮的传动比2,其中i2=/i1。 齿轮传动系统的总重量为: M-+++(信) 根据重量最小原则,令兴-0,可求得: =√8:-√层=24=3.2/2=1.6,则4=40=40 五、综合题(12分)】 23.答:气体压力传感器的工作原理是膜盒2的下半部与壳体1固接,上半部通过连杆与 磁心4相连,磁心4置于两个电感线图3中,后者接人转换电路5。气体压力传感器由敏感元 件、转换元件和基本转换电路三部分组成: (1)敏感元件。膜盒2就是敏感元件,其外部与大气压p。相通,内部感受被测压力p,当 p变化时,引起膜盒上半部移动,即输出相应的位移量。 (2)转换元件。可变电感3是转化元件,它把输人的位移量转换成电感的变化。 (3)基本转换电路。5即为转换电路。 524
四、计算题(1 22. 解z 二级 =i/i1 0 齿轮传动系统的总重量为 M= z~ ]] 根据重量最小原则,令窍 0,可求得 1= 在=2 ,i z=3.2 叩z=4 五、综合题 2分} 23. 作原理是 盒2 壳体 上半 连抨 磁心 4相连,磁心 4置于两个电感线圈 3中,后者接人转换电路 0气体压力传感器由敏感元 件、转换元件和基本转换电路三部分组成 (1)敏感元件.膜盒 2就是敏感元件,其外部与大气压 ι相通,内部感受被测压力 膜盒上半 相应 移量 (2) 转换 感3 转化元件 输入 位移量转换成 (3) 基本 。5 524