
试卷代号:1118 座位号口 中央广播电视大学2011一2012学年度第二学期“开放本科”期末考试 机电一体化系统设计基础试题 2012年7月 题 号 三 四 五 总 分 分 数 得 分 评卷人 一、单选题(每小题4分,共24分) 1.机电一体化技术是以( )技术为核心,强调各种技术的协同和集成的综合性技术。 A.自动化 B.电子 C.机械 D.软件 2.导程L。=8mm的丝杠驱动总质量为60kg的工作台与工件,则工作台与工件折算到丝 杠上的等效转动惯量为( )kg·mm2。 A.48.5 B.97 C.4.85 D.9.7 3.幅频特性和相频特性是模拟式传感器的( )。 A.静态特性指标 B.动态特性指标 C.输入特性参数 D.输出特性参数 4.有一脉冲电源,通过环形分配器将脉冲分配给五相十拍通电的步进电机定子励磁绕组, 已知转子有24个齿,步进电机的步距角是( )。 A.0.6 B.1.2 C.1.5° D.2° 739
试卷代号 1 1 座位号 中央广播电视大学 11 2012 度第 期末 机电一体化系统设计基础试题 2012 年7 总分 分数 得分|评卷人 一、单选题{每小题 4分,共 4分) 1.机电一体化技术是以( A. C. )技术为核心,强调各种技术的协同和集成的综合性技术。 B. D. 2. 程Lo=8mm 丝杠驱 质量为60kg 则工 杠上的等效转动惯量为( )kg. mm A. 48.5 B. 97 C. 4.85 D. 9. 7 3. 相频特性是模 式传感器 )。 A. 态特 B. 态特 C. 性参数 D. 4. 一脉 通过环形 配器 机定子励磁绕组 已知转子有 4个齿,步进电机的步距角是( )。 A. 0.6 C. 1. 50 B. 1. 20 D. 739
5.以下除了(),均是由硬件和软件组成。 A.计算机控制系统 B.PLC控制系统 C.嵌人式系统 D.继电器控制系统 6.HRGP-1A喷漆机器人中的手部属于系统中的()。 A.能源部分 B.传感部分 C.驱动部分 D.执行机构 得 分 评卷人 二、判断题(正确的打√,错误的打×,每题3分,共30分) 7.机电一体化系统的主要功能就是对输人的物质按照要求进行处理,输出具有所需特性 的物质。 ) 8.自动控制是在人直接参与的情况下,通过控制器使被控对象或过程自动地按照预定的 规律运行。 ( ) 9.在闭环系统中,齿轮副的啮合间隙而造成的传动死区能使系统以6~10倍的间隙角产 生低频振荡,因此采用消隙装置,以提高传动精度和系统稳定性。 () 10.采用偏心轴套调整法对齿轮传动的侧隙进行调整,结构简单,且可以自动补偿侧隙。 () 11.伺服驱动系统在控制信息作用下提供动力,伺服驱动包括电动、气动、液压等各种类型 的驱动装置。 () 12.气压伺服系统的过载能力强,在大功率驱动和高精度定位时性能好,适合于重载的高 加减速驱动。 () 13.仿真根据采用的模型不同可分为计算机仿真、半物理仿真和全物理仿真。 () 14.计算机控制系统的采样周期越小,其控制精度就越高。 () 15.现代嵌入式系统的设计方法是将系统划分为硬件和软件两个独立的部分,然后按各自 的设计流程分别完成。 () 16.反求设计是建立在概率统计基础之上,主要任务是提高产品的可靠性,延长使用寿命, 降低维修费用。 () 740
5. ) ,均是由硬件和软件组成。 A. 机控 统B.PLC c.嵌入式系统 .继电器控制系统 6. HRGP-1A 喷漆 )。 A.能源部分 .传感部分 C. 分D. 得分|评卷人 二、判断题{正确的打 -j ,错误的打 X,每题 3分,共 0分) 7. 要功 就是对输入 物 质 求进行处 的物质。( ) 8. 人直接参 通过 被控对象 规律运行。( ) 9. 齿轮 以6~10 的 间 生低频振荡,因此采用消隙装置,以提高传动精度和系统稳定性。( ) 10. 心轴 法对齿轮 侧 隙进行调 结构 动补 ( ) 1 1. 驱动 统在 提供 驱动 压等各 的驱动装置。( ) 12. 气压 载能力 强 率驱 和 高 定位 适合 重 载 加减速驱动。( ) 13. 据采 算机仿真 仿真 ) 14. 算机控 ) 15. 代嵌入式 是将 硬件 软件 部分 按各 的设计流程分别完成。( ) 16. 反求设计是建 概率统计 主要任务是提 品 的 靠性 延长 降低维修费用。( ) 740
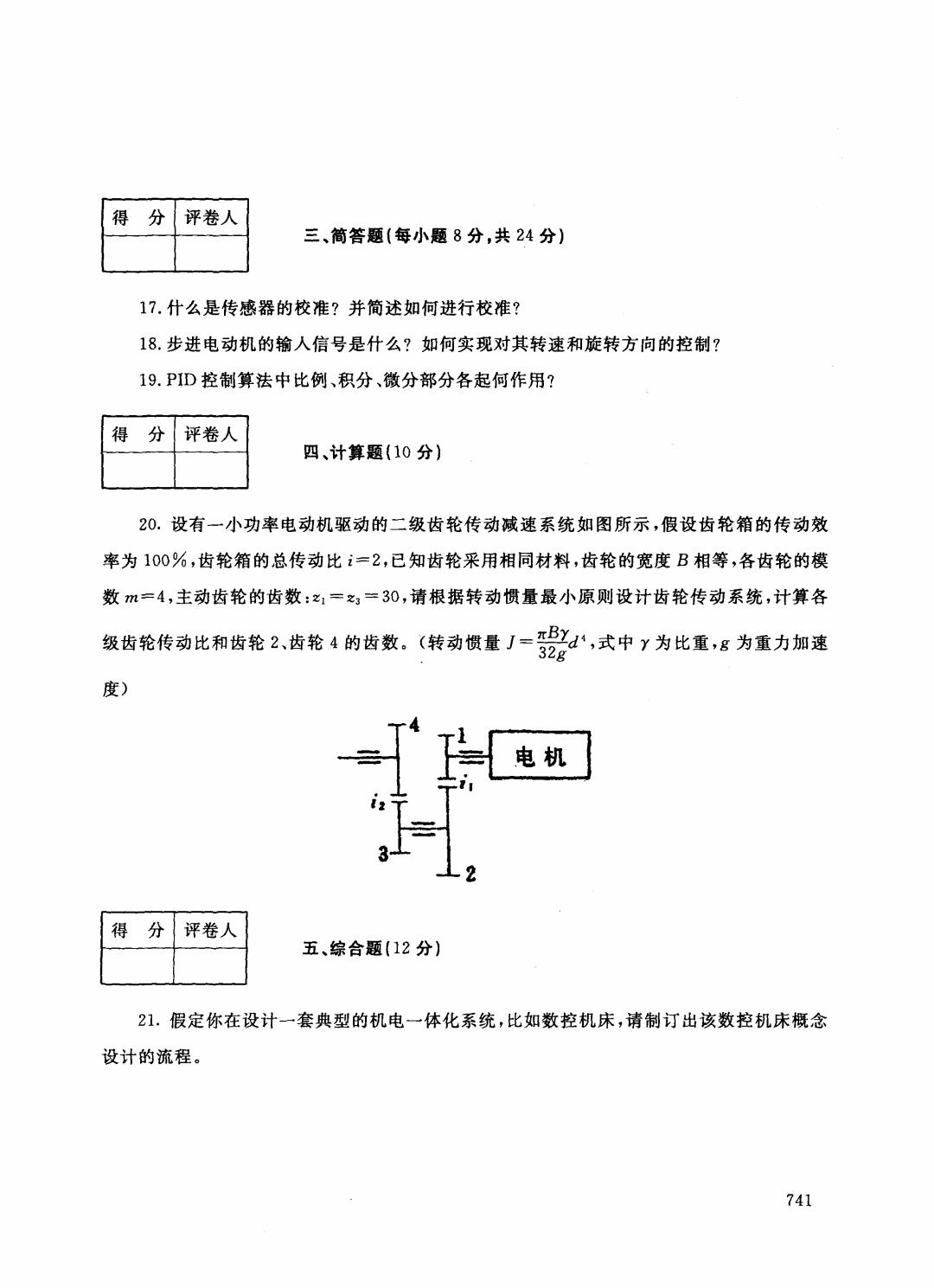
得 分 评卷人 三、简答题(每小题8分,共24分) 17.什么是传感器的校准?并简述如何进行校准? 18.步进电动机的输人信号是什么?如何实现对其转速和旋转方向的控制? 19.PID控制算法中比例、积分、微分部分各起何作用? 得 分 评卷人 四、计算题(10分) 20.设有一小功率电动机驱动的二级齿轮传动减速系统如图所示,假设齿轮箱的传动效 率为100%,齿轮箱的总传动比i=2,已知齿轮采用相同材料,齿轮的宽度B相等,各齿轮的模 数m=4,主动齿轮的齿数:之1=3=30,请根据转动惯量最小原则设计齿轮传动系统,计算各 级齿轮传动比和齿轮2、齿轮4的齿数。(转动惯量J=By14,式中y为比重,g为重力加速 32g 度) 电机 得分 评卷人 五、综合题(12分) 21.假定你在设计一套典型的机电一体化系统,比如数控机床,请制订出该数控机床概念 设计的流程。 741
- 得分 l评卷人 三、简答题{每小题 17. 校准 何进 18. 入信 转速 19.PID 各起 得分|评卷人 四、计算题 20. 二级 减速 率为 ,齿轮箱的总传动比 ;;; 采用 相 齿轮 度B 相等 级齿轮传动比和齿轮 2、齿轮 4的齿数。〈转动惯量 4 ‘ 度) -- e II ..-且1 」→4 - 电机 且. ... -- ' ... • • 4 • • " 3 2 得分评卷人 - 五、综合题 2分) 21. 定你 控 机 控 机 概念 设计的流程 H 741

试卷代号:1118 中央广播电视大学2011一2012学年度第二学期“开放本科”期末考试 机电一体化系统设计基础试题答案及评分标准 (供参考) 2012年7月 一、单选题(每题4分,共24分) 1.B 2.B 3.B 4.C 5.D 6.D 二、判断题(每题3分,共30分】 7.× 8.× 9.X 10.× 11./ 12.× 13./ 14.× 15.× 16.× 三、简答题(每小题8分,共24分) 17.答:传感器在使用前、使用中或搁置一段时间再使用时必须对其性能参数进行复测或 做必要的调整和修正,以确保传感器的测量精度,这个复测调整过程称为校准。 为了对传感器有一个长期的、稳定的和高精度的基准,在一些测量仪器中特别是内部装有 微处理器的测量仪器中,很容易实现自动校准功能。对传感器进行校准时,需要精度比它高的 基准器,这种基准器受时间的推移和使用的磨损等因素的影响,参数会随之改变。因此对这种 基准器还要用更高精度的基准器来定期校准。 18.答:步进电机的输入信号是脉冲序列。 步进电机的步矩角a与运行拍数m、通电方式k(m=kN,单拍时k=1,双拍时k=2,N为 定子绕组的相数)、转子的齿数之有关。步进电机定子绕组通电状态的改变速度越快,其转子 旋转的速度越快,即通电状态的变化频率越高,转子的转速越高。 改变步进电机定子绕组的通电顺序,转子的旋转方向随之改变。 19.答:P(比例)I(积分)D(微分)调节器是将偏差的比例、积分、微分通过线性组合构成控 制量。其中比例调节起纠正偏差的作用,其反应迅速;积分调节能消除静差,改善系统静态特 性;微分调节有利于减少超调,加快系统的过渡过程。此三部分作用配合得当,可使调节过程 快速、平稳、准确,收到较好的效果。 742
试卷代号 1 1 中央广播电视大学 11 2012 学年度第 二学 末考 机电一体化系统设计基础试题答案及评分标准 (供参考) 2012 年7 一、单选题(每题 4分,共 4分) I. B 2. B 3. B 4. C 5. D 6. D 二、判断题(每题 3分,共 0分) 7. X 8. X 9. X 10. X 11. .J 12. X 13. .J 14. X 15. X 16. X 三、简答题{每小题 8分,共 4分} 17. 用前 其性 能 做必要的调整和修正,以确保传感器的测量精度,这个复测调整过程称为校准。 为了对传感器有一个长期的、稳定的和高精度的基准,在一些测量仪器中特别是内部装有 微处理器的测量仪器中,很容易实现自动校准功能。对传感器进行校准时,需要精度比它高的 基准器,这种基准器受时间的推移和使用的磨损等因素的影响,参数会随之改变。因此对这种 基准器还要用更高精度的基准器来定期校准。 18. 步进 是脉 步进电机的步矩角 α与运行拍数 、通电方式 m = ,单拍时 l,双拍时 N为 定子绕组的相数)、转子的齿数 z有关。步进电机定子绕组通电状态的改变速度越快,其转子 旋转的速度越快,即通电状态的变化频率越高,转子的转速越高。 改变步进电机定子绕组的通电顺序,转子的旋转方向随之改变。 19. l( 节器是 偏差 积分 微分 性组 成控 制量。其中比例调节起纠正偏差的作用,其反应迅速;积分调节能消除静差,改善系统静态特 性;微分调节有利于减少超调,加快系统的过渡过程。此三部分作用配合得当,可使调节过程 快速、平稳、准确,收到较好的效果。 742
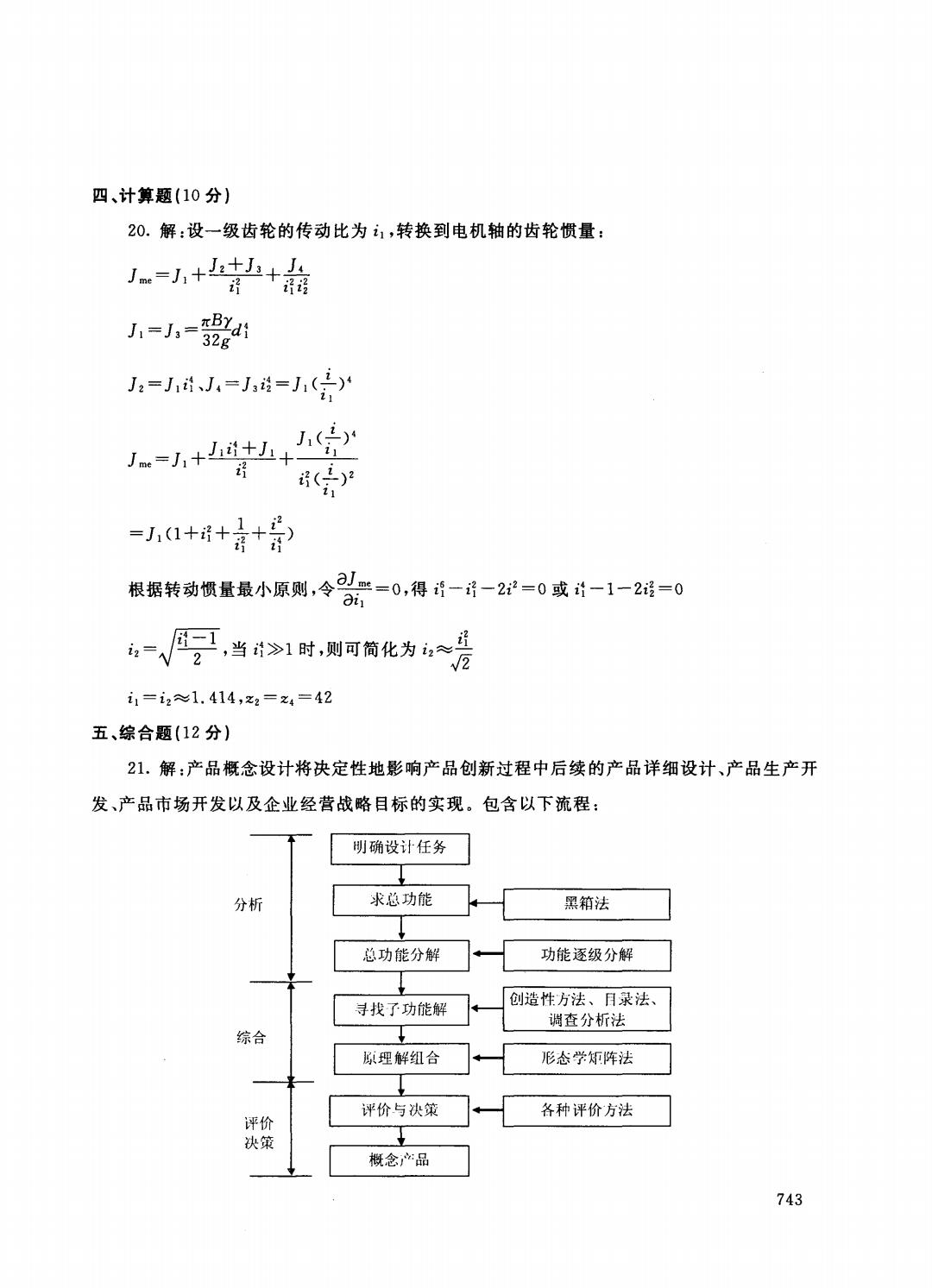
四、计算题(10分) 20.解:设一级齿轮的传动比为i1,转换到电机轴的齿轮惯量: J=J,+Jt1+ 计语 小,--影 J2=J1J=J这=1() J=1++山 J1(2) 11 -11+++ 根据转动惯量最小原则,令=0,得进一一22=0或计一1一2透=0 =√受,当对1时,则可简化为 √2 i1=i2≈1.414,z2=z4=42 五、综合题(12分) 21.解:产品概念设计将决定性地影响产品创新过程中后续的产品详细设计、产品生产开 发、产品市场开发以及企业经营战略目标的实现。包含以下流程 明确设计任务 分析 求总功能 黑箱法 总功能分解 功能逐级分解 寻找了功能解 创造性方法、目录法、 调查分析法 综合 原理解组合 形态学矩阵法 评价与决策 各种评价方法 评价 决策 概念产品 743
四、计算题 20. 级齿 齿轮惯 T2 3 , 14 1me=11+ 气f+ .. 1tAs =13 一-32gA 12 = 1 1i1 13i~ = 11 (τ!.... )4 11(-!-)4 Jl ii+Jl l 1me=11+ ZIti<fLy =110+ii+ 根据转动惯量最小原则,令学 0,得 i t -1-2i~ =0 zz== 干,当怜 l时,则可简化为 i 2 tl=i2 1. 414 ,2:2=句 五、综合题 1. 念设 定性 创新过 后续 发、产品市场开发以及企业经营战略目标的实现。包含以下流程: 分析 古告 --,、口 评价 决策 明确设计任务 求总功能 黑箱法 总功能分解 • 功能逐级分解 创造性方法、日录法、 寻找子功能解 调查分析法 以理解组合 • 形态学 评价与决策 • 各种评价启法 概念产品 743
(1)首先是将设计任务抽象化,确定出系统的总功能; (2)根据系统的总功能要求和构成系统的功能要素进行总功能分解,划分出各功能模块, 将总功能分解为子功能,直到分解到不能再分解的功能元,形成功能树;确定它们之间的逻辑 关系; (3)对各功能模块输入/输出关系进行分析,确定功能模块的技术参数和控制策略、系统的 外观造型和总体结构; (4)寻找子功能(功能元)的解,并将原理解进行组合,形成多种原理解设计方案; (5)以技术文件的形式交付设计组讨论、审定。 (6)方案进行整体评价:对不同的方案进行整体评价,选择综合指标最优的设计方案。最 终选定最佳方案形成概念产品。 (注:绘制出流程图或文字作答均可。) 744
(1)首先是将设计任务抽象化,确定出系统的总功能; (2) 能要 构成 行总功 能 划 分 模块 将总功能分解为子功能,直到分解到不能再分解的功能元,形成功能树;确定它们之间的逻辑 关系; (3) 输入 进行 功能 参数和控 外观造型和总体结构; (4) 功能 解进行组合 形成 设计 (5) 技术文件 式交付设 讨论 (6) 进行 进行 体评 选择综 最优 终选定最佳方案形成概念产品。 (注:绘制出流程图或文字作答均可。〉 744