试卷代号:1118 座位■口 中央广播电视大学2010一2011学年度第一学期“开放本科”期末考试 机电一体化系统设计基础 试题 2011年1月 题 号 二 三 四 五 总 分 分 数 得分 评卷人 一、判断题(正确的打√,错误的打×,每题3分,共30分) 1.机电一体化产品不仅是人的手与肢体的延伸,还是人的感官与头脑的延伸,具有"智能 化的特征是机电一体化与机械电气化在功能上的本质差别。() 2.系统论、信息论、控制论是机电一体化技术的理论基础,是机电一体化技术的方法论。 () 3.为减少机械传动部件的扭矩反馈对电机动态性能的影响,机械传动系统的基本固有频 率应低于电气驱动部件的固有频率的2~3倍,同时,传动系统的固有频率应接近控制系统的 工作频率,以免系统产生振荡而失去稳定性。() 4.系统的静摩擦阻尼越大,使系统的回程误差增大,定位精度降低。() 5.采用双螺母螺纹调隙以消除滚珠丝杠副轴向间隙,结构形式结构紧凑,工作可靠,调整 方便,能够进行很精确的调整。() 6.在闭环系统中,因齿轮副的啮合间隙而造成的传动死区能使系统以1~5倍的间隙角 产生低频振荡,采用消隙装置,以提高传动精度和系统稳定性。(·) 7.齿轮传动系统各级传动比的最佳分配原则中等效转动惯量最小原则是使所设计的齿 轮传动系统换算到该齿轮传动系统输出轴上的等效转动惯量为最小。() 8.步进电动机的转动惯量越大,同频率下的起动转矩就越大。() 9.直流伺服电动机的调速特性是电机转速与其输出转矩的关系。() 748
试卷代号 1 1 座位号 • 中央广播电视大学 2011 度第一 本科 末考 机电一体化系统设计基础试题 2011 年1 题号 总分 分数 得分|评卷人 一、判断题(正确的打飞/ ,错误的打 X,每题 3分,共 0分} 1.机电一体化产品不仅是人的手与肢体的延伸,还是人的感官与头脑的延伸,具有"智能 化的特征是机电一体化与机械电气化在功能上的本质差别。( ) 2. 统论 体化 理论基 体化 ( ) 3. 机械传 部件 矩反馈对 态性 机械 基本 率应低于电气驱动部件的固有频率的 3倍,同时,传动系统的固有频率应接近控制系统的 工作频率,以免系统产生振荡而失去稳定性。( ) 4. 差增 定位 度降低 ) 5. 采用 调 隙 结构 式结 工作 方便,能够进行很精确的调整。( ) 6. 齿轮 啃合 而 造 以1~5 的 间 产生低频振荡,采用消隙装置,以提高传动精度和系统稳定性。( ) 7. 各级传 配原 等效转 惯 量最小 是使所设计 轮传动系统换算到该齿轮传动系统输出轴上的等效转动惯量为最小。( ) 8. 惯量 转矩就 ) 9. 伺 服 性是 其输 ) 748
10.嵌人式系统大多工作在为特定用户群设计的系统中,通常都具有低功耗、体积小、集 成度高等特点。( 得 分 评卷人 二、单选题(每小题4分,共24分) 1. 机械系统的刚度对系统的动态特性主要影响表现为( )等方面。 A.固有频率、响应速度、惯量 B.固有频率、失动量、稳定性 C.摩擦特性、响应速度、稳定性 D.摩擦特性、失动量、惯量 2.多级齿轮传动中,各级传动比相等的分配原则适用于按( )设计的传动链。 A.最小等效转动惯量原则 B.输出轴的转角误差最小原则 C.重量最轻原则(小功率装置) D.重量最轻原则(大功率装置) 3.幅频特性和相频特性是模拟式传感器的( )。 A.静态特性指标 B.动态特性指标 C.输入特性参数 D.输出特性参数 4.半闭环控制的驱动装置中,丝杠螺母机构位于闭环之外,所以它的( )。 A.回程误差不影响输出精度,但传动误差影响输出精度 B.传动误差不影响输出精度,但回程误差影响输出精度 C.回程误差和传动误差都不会影响输出精度 D.回程误差和传动误差都会影响输出精度 5.步进电机转角的精确控制是通过控制输入脉冲的( )来实现的。 A.频率 B.数量 C.步距角 D.通电顺序 6.HRGP-1A喷漆机器人中的旋转变压器属于系统中的( A.能源部分 B.测试传感部分 C.驱动部分 D.执行机构 749
10. 嵌人 工作在 特定 的 系 积小 成度高等特点。( ) 得分 评卷人 二、单选题{每小题 4分,共 4分} 1.机械系统的刚度对系统的动态特性主要影响表现为( )等方面。 A. 速度 B. 有频 C. 擦特性 稳定性 D.摩擦特性、失动量、惯量 2. 传动 各级传动 相等 )设计的传动链。 A. 小等效转 惯量 B. 最小原 c.重量最轻原则(小功率装置) D.重量最轻原则(大功率装置) 3. 频特性 相频特性 拟式传感器 )。 A.静态特性指标 .动态特性指标 c.输人特性参数 .输出特性参数 4. 环控 装置 机构 之外 )。 A. 误差 B. 差不 差影 c.回程误差和传动误差都不会影响输出精度 D. 差和 误差都会 精度 5. 角 的 过控 输入脉 )来实现的。 A.频率 .数量 c.步距角 .通电顺序 6. HRGP-IA 旋转 属 于 )。 A. 分B. 传感 c.驱动部分 .执行机构 749
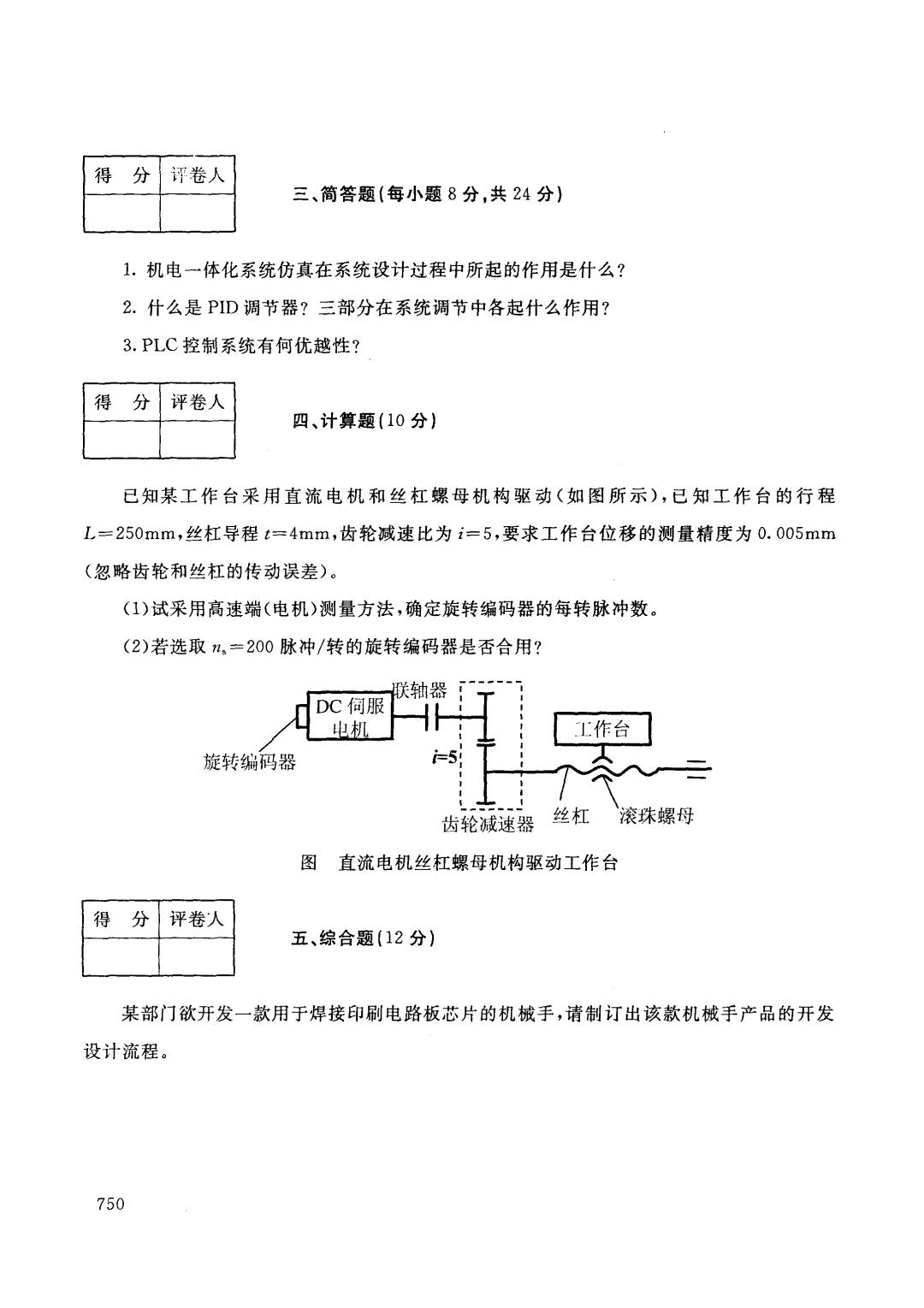
得 分 评卷人 三、简答题(每小题8分,共24分)》 1.机电一体化系统仿真在系统设计过程中所起的作用是什么? 2.什么是PID调节器?三部分在系统调节中各起什么作用? 3.PLC控制系统有何优越性? 得 分 评卷人 四、计算题(10分) 已知某工作台采用直流电机和丝杠螺母机构驱动(如图所示),已知工作台的行程 L=250mm,丝杠导程t=4mm,齿轮减速比为i=5,要求工作台位移的测量精度为0.005mm (忽略齿轮和丝杠的传动误差)。 (1)试采用高速端(电机)测量方法,确定旋转编码器的每转脉冲数。 (2)若选取n=200脉冲/转的旋转编码器是否合用? 联轴器 DC伺服 电机 工作台 旋转编码器 =5 齿轮减速器 丝杠滚珠螺母 图 直流电机丝杠螺母机构驱动工作台 得分 评卷人 五、综合题(12分) 某部门欲开发一款用于焊接印刷电路板芯片的机械手,请制订出该款机械手产品的开发 设计流程。 750
得分 三、简答题(每小题 2 4 1.机电一体化系统仿真在系统设计过程中所起的作用是什么? 2. 是PID 节器 部分在 起什 3. PLC 得分|评卷入 四、计算题 已知某工作台采用直流电机和丝杠螺母机构驱动〈如图所示) ,已知工作台的行程 L=250mm 程t=4mm 为i=5 要求工 作 位移 mm (忽略齿轮和丝杠的传动误差〉。 (1)试采用高速端(电机〉测量方法,确定旋转编码器的每转脉冲数。 (2) 若选取 2 0 0 …T L T i DC ----…- 齿轮减速器 图直流电机丝杠螺母机构驱动工作台 得分|评卷:人 五、综合题 某部门欲开发一款用于焊接印刷电路板芯片的机械子,请制订出该款机械手产品的开发 设计流程。 750
试卷代号:1118 中央广播电视大学2010一2011学年度第一学期“开放本科”期末考试 机电一体化系统设计基础试题答案及评分标准 (供参考) 2011年1月 一、判断题(正确的打√/,错误的打×,每题3分,共30分)】 1./ 2./ 3.× 4./ 5.× 6./ 7.X 8.× 9.× 10./ 二、单选题(每小题4分,共24分) 1.B 2.C 3.B 4.D 5.B 6.B 三、简答题(每小题8分,共24分)》 1.答:在进行项目的设计和规划时,往往需要对项目的合理性、经济性等品质加以评价; 在系统实际运行前,也希望对项目的实施结果加以预测,以便选择正确、高效的运行策略或提 前消除设计中的缺陷,最大限度地提高实际系统的运行水平。采用仿真技术可以省时、省力、 省钱地达到上述目的。 2.答:按偏差的比例、积分和微分进行控制的调节器,将偏差的比例、积分、微分通过线性 组合构成控制量,简称为P(比例)1(积分)D(微分)调节器,是连续系统中技术成熟、应用最为 广泛的一种调节器。 a.PID调节器中比例调节起纠正偏差的作用,其反应迅速; b.积分调节能消除静差,改善系统静态特性; c.微分调节有利于减少超调,加快系统的过渡过程。 3.答:PLC主要具有可靠性高、环境适应性强、灵活通用、使用方便、维护简单,PLC提供 标准通信接口,可以方便地构成PLC-PLC网络或计算机-PLC网络,PLC应用程序的编制和 调试非常方便,PLC具有监控功能。 751
试卷代号 1 1 1 中央广播电视大学 2011 学 年度 第 开放 机电一体化系统设计基础试题答案及评分标准 (供参考) 2011 年1 一、判断题{正确的打、 错误 1. -J 2. -J 3. X 4. -J 5. X 6. -J 7. X 8. X 9. X 10. -J 二、单选题{每小题 4分,共 4分) loB 2. C 3. B 4. D 5. B 6. B 三、简答题(每小题 8分,共 4分) 1.答:在进行项目的设计和规划时,往往需要对项目的合理性、经济性等品质加以评价; 在系统实际运行前,也希望对项目的实施结果加以预测,以便选择正确、高效的运行策略或提 前消除设计中的缺陷,最大限度地提高实际系统的运行水平 o采用仿真技术可以省时、省力、 省钱地达到上述目的。 2. 分进行 调节 将偏 积分 微分通过线 组合构成控制量,简称为 (比例 (积分 (微分)调节器,是连续系统中技术成熟、应用最为 广泛的一种调节器。 a. PID 节器 中 比 迅速 b. 积分 统静态特性 C. 微分 少超 过渡过程 3. 答:PLC 有可 环境适应性 护 简 ,PLC 标准通信接口,可以方便地构成 C网络或计算机 C网络, C应用程序的编制和 调试非常方便, C具有监控功能。 751
四、计算题(10分) 1.解:(1)(6分)在高速端进行测量: 设传感器的每转脉冲数为n,每个脉冲对应工作台的位移为: aL=品 由测量精度△L=0.005mm,则: n=太-5x05=160脉冲/转 4 (2)(4分)选取n=200转的光电编码器,则理论测量精度 4 △L'=5X20=0.004<0.005 满足题目要求。 五、综合题(12分) 解:机电一体化系统的主要设计流程分为五个阶段:产品规划、概念设计、详细设计、设计 实施和设计定型阶段。 第一阶段:产品规划阶段:进行需求分析和需求设计,以明确设计任务。比如,可以明确: 机械手的用途:焊接芯片。 工作方式:手动、自动方式。 主要技术参数:自由度、定位精度、运行速度等。 使用环境要求:生产线。 第二阶段:概念设计阶段:在功能分析的基础上,优化筛选取得较理想的工作原理方案。 第三阶段:详细设计阶段。对各功能模块进行细部设计,绘制相应的工程图。该阶段的工作 量既包括机械、电气、电子、控制与计算机软件等系统的设计,又包括总装图和零件图的绘制。 第四阶段:设计实施阶段。首先根据机械、电气图纸和算法文件,制造、装配和编制各功能 模块;然后进行模块的调试;最后进行系统整体的安装调试,复核系统的可靠性及抗干扰性。 第五阶段:设计定型阶段。对调试成功的系统进行工艺定型,整理设计资料。小批量生 产,试销。 752
四、计算题(1 0分} 1.解:(1 )( 6分)在高速端进行测量: 设传感器的每转脉冲数为 ,每个脉冲对应工作台的位移为: t:,L zn 由测量精度 t:, 0 5 mm ,则: 71= 了=ritτ=160 (2)(4 选取 2 0 0 ALF=-1一=0.004<0.005 5X200 满足题目要求。 五、综合题(12分) 解:机电一体化系统的主要设计流程分为五个阶段:产品规划、概念设计、详细设计、设计 实施和设计定型阶段。 第一阶段:产品规划阶段:进行需求分析和需求设计,以明确设计任务。比如,可以明确: 机械手的用途:焊接芯片。 工作方式:手动、自动方式。 主要技术参数:自由度、定位精度、运行速度等。 使用环境要求:生产线。 第二阶段:慨念设计阶段:在功能分析的基础上,优化筛选取得较理想的工作原理方案。 第三阶段:详细设计阶段。对各功能模块进行细部设计,绘制相应的工程图。该阶段的工作 量既包括机械、电气、电子、控制与计算机软件等系统的设计,又包括总装固和零件图的绘制。 第四阶段:设计实施阶段。首先根据机械、电气图纸和算法文件,制造、装配和编制各功能 模块;然后进行模块的调试;最后进行系统整体的安装调试,复核系统的可靠性及抗干扰性。 第五阶段:设计定型阶段。对调试成功的系统进行工艺定型,整理设计资料。小批量生 产,试销。 752