试卷代号:1118 座位号■ 中央广播电视大学2009一2010学年度第二学期“开放本科”期末考试 机电一体化系统设计基础 试题 2010年7月 题号 三 四 五 总 分 分 数 得 分 评卷人 一、判断题(正确的打√,错误的打×,每题3分,共30分) 1.机电一体化系统的主要功能就是对输入的物质按照要求进行处理,输出具有所需特性 的物质。() 2.滚珠丝杠垂直传动时,必须在系统中附加自锁或制动装置。() 3.齿轮传动的啮合间隙会造成一定的传动死区,若在闭环系统中,传动死区会使系统产 生低频震荡。() 4.迟滞是传感器的一种动态误差,是由于在传感器的正反行程中的输出输入特性曲线不 重合引起的。() 5.直流伺服电动机和永磁同步交流伺服电动机都可以采用PWM控制方式进行控制。 ( 6.无论采用何种控制方案,系统的控制精度总是高于检测装置的精度。() 7.计算机控制系统的采样周期越小,其控制精度就越高。() 8.仿真根据采用的模型可以分为计算机仿真、半物理仿真和全物理仿真。() 9.现代嵌入式系统的设计方法是将系统划分为硬件和软件两个独立的部分,然后按各自 的设计流程分别完成。() 10.数字化物理样机就是一种结构设计软件,强调结构上的设计。() 746
试卷代号 1 1 1 座位号 中央广播电视大学 2 0 0 2010 学年 二学 末考 机电一体化系统设计基础试题 2010 年7 题号 • 总分 分数 得分|评卷人 一、判断题(正确的打、 错误 1.机电一体化系统的主要功能就是对输入的物质按照要求进行处理,输出具有所需特性 的物质。( ) 2. 垂直传 附加 或制 ) 3. 轮传 会造 一 定 传动 死 统产 生低频震荡。( ) 4. 滞是传感器 种动 于在传 正 反行程 特性 重合引起的。( ) 5. 交流伺 用PWM 方式 行控 ( ) 6. 采用 度 总 装 置 精度 ) 7. 算机 采样 度就 ) 8. 仿真根据 型 可 算机仿 理仿真 ) 9. 嵌入式 设计方 软件两 后 按 的设计流程分别完成。( ) 10. 理样机就是→ 软件 ) 746
得分 评卷人 二、单选题(每小题4分,共24分)》 1.传动系统的固有频率对传动精度有影响, 固有频率可减小系统地传动误差, 系统刚度可提高固有频率。() A.提高,提高 B.提高,减小 C.减小,提高 D.减小,减小 2.下列哪个不是传感器的动特性?() A.幅频特性 B.临界频率 C.相频特性 D.分辨率 3.对同一种步进电机,三相单三拍的步距角是三相六拍的( )倍。 A.0.5 B.1 C.2 D.3 4.在开环控制系统中,常用( )做驱动元件。 A,直流伺服电动机 B.步进电动机 C.同步交流伺服电动机 D.异步交流伺服电动机 5.以下抑制电磁干扰的措施,除了( ),其余都是从切断传播途径入手。 A.屏蔽 B.隔离 C.滤波 D.软件抗干扰 6.HRGP-1A喷漆机器人中的活塞式液压缸属于系统中的( A.能源部分 B.测试传感部分 C.驱动部分 D.执行机构 747
得分 评卷人 二、单选题(每小题 4分,共 4分) 1.传动系统的固有频率对传动精度有影响, 固有频率可减小系统地传动误差, 系统刚度可提高固有频率。( ) A. B. c.减小,提高 D. 减小 减小 2. 是传感器 ( ) A. 幅频 B.临界频率 C. D. 3. 一种步 三相 相六 )倍。 A. 0.5 C. 2 B. 1 D. 3 4. 在开环控 常用 )做驱动元件。 A. 伺服 B. c.同步交流伺服电动机 D. 异步交流伺 5. 下抑 措施 ) ,其余都是从切断传播途径入手。 A. 蔽B. c.滤波 .软件抗干扰 6. HRGP~lA 塞式 压缸属 于 )。 A. 能源 B. 传感 c.驱动部分 .执行机构 747
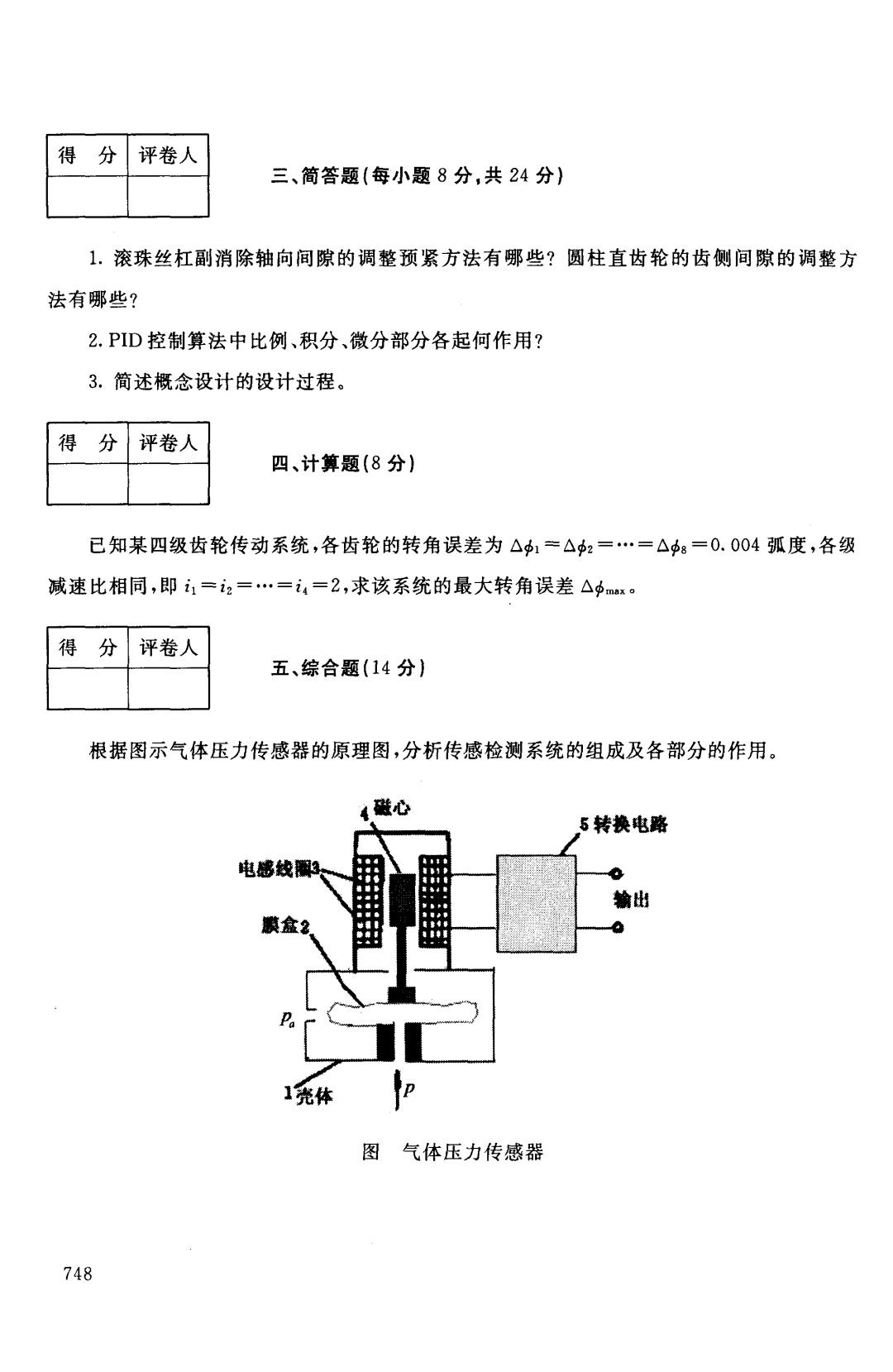
得 分 评卷人 三、简答题(每小题8分,共24分) 1.滚珠丝杠副消除轴向间隙的调整预紧方法有哪些?圆柱直齿轮的齿侧间隙的调整方 法有哪些? 2.PID控制算法中比例、积分、微分部分各起何作用? 3.简述概念设计的设计过程。 得 分 评卷人 四、计算题(8分)】 已知某四级齿轮传动系统,各齿轮的转角误差为△1=△2=…=△8=0.004孤度,各级 减速比相同,即i1=i2=…=i4=2,求该系统的最大转角误差△中mx。 得 分 评卷人 五、综合题(14分) 根据图示气体压力传感器的原理图,分析传感检测系统的组成及各部分的作用。 磁心 5转换电路 电部线3 输出 膜盒2 1完体 图气体压力传感器 748
得分|评卷人 三、简答题{每小题 8分,共 4分} 1.滚珠丝杠副消除轴向间隙的调整预紧方法有哪些?圆柱直齿轮的齿侧间隙的调整方 法有哪些? 2. PID 积分 3. 述概念设 过程 得分|评卷人 四、计算题 8分} 已知某四级齿轮传动系统,各齿轮的转角误差为 1::. 1> = I::. 如 = 1::. 0 0 减速比相同,即 =i2 = …= i 4 =2 最大转 得分|评卷人 五、综合题(1 根据图示气体压力传感器的原理图,分析传感检测系统的组成及各部分的作用。 电蟠蠕 转换 输出 .r--~ ..--.....,.y 叫一 748 p 图气体压力传感器

试卷代号:1118 中央广播电视大学2009一2010学年度第二学期“开放本科”期末考试 机电一体化系统设计基础试题答案及评分标准 (供参考) 2010年7月 一、判断题(每小题3分,共30分】 1.× 2./ 3.W 4.X 5./ 6.× 7.X 8./ 9.X 10.× 二、单选题(每小题4分,共24分) 1.A 2.D 3.C 4.B 5.D 6.C 三、简答题(每题8分,共24分) 1.答:(1)滚珠丝杠副消除轴向间隙的调整预紧方法有:螺纹预紧调整式、双螺母齿差预 紧调整式、双螺母垫片预紧调整式、弹簧式自动调整预紧式、单螺母变位导程自预紧式。 (2)圆柱直齿轮的齿侧间隙的调整方法有:偏心套调整法、轴向垫片调整法、双片薄齿轮错 齿调整法(周向拉簧式、可调拉簧式)。 2.答:P(比例)I(积分)D(微分)调节器是将偏差的比例、积分、微分通过线性组合构成控 制量。其中比例调节起纠正偏差的作用,且其反应迅速;积分调节能消除静差,改善系统静态 特性;微分调节有利于减少超调,加快系统的过渡过程。此三作用配合得当,可使调节过程快 速、平稳、准确,收到较好的效果。 3.答:设计过程:设计任务抽象化,确定系统的总功能→将总功能分解为子功能,直到功 能元→寻找子功能(功能元)的解→将原理解进行组合,形成多种原理解设计方案→对众多方 案进行评价决策,选定最佳方案→概念产品。 四、计算题(8分) 解:由系统可知: △=△画+A0,十△+△0十△亚+△,十△迎+△中 i2·i3·i4i3·i4 749
试卷代号 1 1 中央广播电视大学 0 0 2010 度第 二学 开放 机电一体化系统设计基础试题答案及评分标准 (供参考) 2010 年7 一、判断题(每小题 3分,共 0分) 1. X 2. ..J 6. X 7. X 二、单选题(每小题 4分,共 4分} 3. ..J 8. ..J 4. X 9. X 5. ..J 10. X LA 2. D 3. C 4. B 5. D 6. C 三、简答题(每题 8分,共 4分) 1.答: (1)滚珠丝杠副消除轴向间隙的调整预紧方法有:螺纹预紧调整式、双螺母齿差预 紧调整式、双螺母垫片预紧调整式、弹簧式自动调整预紧式、单螺母变位导程自预紧式。 (2) 齿轮 齿侧 调整 整法 齿轮错 齿调整法(周向拉簧式、可调拉簧式)。 2. 答:P( )I 分)D( 调节 分通 过 制量。其中比例调节起纠正偏差的作用,且其反应迅速;积分调节能消除静差,改善系统静态 特性;微分调节有利于减少超调,加快系统的过渡过程。此三作用配合得当,可使调节过程快 速、平稳、准确,收到较好的效果。 3. 设计 功 能 分解 能元→寻找子功能(功能元)的解→将原理解进行组合,形成多种原理解设计方案→对众多方 案进行评价决策,选定最佳方案→概念产品。 四、计算题 8分) 解:由系统可知: Aφ1 , L:. , L:. CI> AφmH= ?一 一? L:.φs 749
则系统可能的最大误差为: 0.004+0.004+0.004+0.004+0.004+0.004+0.004+0.004 △Φx=2X2X2×2 2×2X2 2X2 =0.01125(rad) 五、综合题(14分) 答:气体压力传感器的工作原理是膜盒2的下半部与壳体1固接,上半部通过连杆与磁心 4相连,磁心4置于两个电感线圈3中,后者接人转换电路5。气体压力传感器由敏感元件、转 换元件和基本转换电路三部分组成: (1)敏感元件。膜盒2就是敏感元件,其外部与大气压P。相通,内部感受被测压力P,当p 变化时,引起膜盒上半部移动,即输出相应的位移量。 (2)转换元件。可变电感3是转化元件,它把输入的位移量转换成电感的变化。 (3)基本转换电路。5即为转换电路。 750
则系统可能的最大误差为: 0.004 , 0. 004+ 0. 004, 0.004十O. 004 , O. 004 十0.004 Aφm= 0 4 2X2X2X2' 2X2X2 ' 2X2 =0.01125(rad) 五、综合题 答:气体压力传感器的工作原理是膜盒2的下半部与壳体1固接,上半部通过连杆与磁心 心4 感线 圈3 者接 路5 气体 感器 感元 换元件和基本转换电路三部分组成: (1)敏感元件。膜盒2就是敏感元件,其外部与大气压 相通 感受被 .当 变化时,引起膜盒上半部移动,即输出相应的位移量。 (2) 转换 可变 感3 转化 位移 换成 (3) 本转 。5 750