试卷代号:1118 座位号■■ 中央广播电视大学2007-一2008学年度第二学期“开放本科”期末考试 机电一体化系统设计基础 试题 2008年7月 题 号 二 三 四 五 六 总 分 分 数 得 分 评卷人 一、判断题(每小题2分,共20分) 判断下列所述是否正确,正确填入“十”号,错误则填“一”号。 1.接口技术是系统技术中的一个方面,它的功能是实现系统各部分的可靠连接。() 2.机电一体化产品的适应性设计是指改变产品部分结构尺寸而形成系列产品的设计。 ( 3.在喷漆机器人的开发设计过程中,详细设计完成后即可进行样机的试制。() 4.传动轴在单向回转时,回程误差对传动精度没有影响。() 5.开环控制系统,执行装置的误差直接影响系统精度,但不存在稳定性问题。() 6.通常,步进电机的最高连续工作频率远大于它的最高启动频率。() 7.工业PC机与个人计算机IBM PC的最大差别是换用了工业电源。() 8.STD总线可采用总线复用技术,也支持多处理机系统。() 9.传感器的静态特性是特指输人量为常量时,传感器的输出与输入之间的关系。() 10.数字式传感器的动态特性是输人量变化的临界速度。() 748
试卷代号:1118 座位号[二口 中央广播电视大学2007-2008学年度第二学期“开放本科”期末考试 机电一体化 系统设计基础 试题 2008年 7月 题 号 四 五 六 总 分 分 数 得 分 评卷人 一、判断题(每小题 2分,共 20分) 判 断下列所述是否正确,正确填入“+”号 ,错误则填“一”号 。 1.接 口技术是系统技术 中的一个方面 ,它的功能是实现系统各部分 的可靠连接 。( ) 2.机电一体化产品的适应性设计是指改变产品部分结构尺寸而形成系列产品的设计。 3.在喷漆机器人的开发设计过程中,详细设计完成后即可进行样机 的试制。( ) 4.传动轴在单向回转时,回程误差对传动精度没有影响。( ) 5.开环控制 系统 ,执行装置的误差直接影响系统精度,但不存在稳定性 问题 。( ) 6.通常,步进电机的最高连续工作频率远大于它的最高启动频率。( 7.工业 PC机与个人计算机 IBM PC的最大差别是换用了工业电源 。( ) 8. STD总线可采用总线复用技术,也支持多处理机系统。 9.传感器的静态特性是特指输人量为常量时,传感器的输出与输人之间的关系。( ) 10.数字式传感器的动态特性是输人量变化的临界速度。 748
得分 评卷人 二、选择题(每小题2分,共20分】 1.数控机床进给系统的伺服电机属于设备的()。 A.能源部分 B.执行机构 C.驱动部分 D.控制及信息处理单元 2.在工业机器人的设计中,( )是理论分析阶段要进行的工作之一。 A.传感器的选择及精度分析 B.技术经济性分析 C.控制系统硬件电路设计 D.控制系统软件配置与调试 3.为提高机电一体化机械传动系统的固有频率,应设法()。 A.增大系统刚度 B.增大系统转动惯量 C.增大系统的驱动力矩 D.减小系统的摩擦阻力 4.多级齿轮传动中,各级传动比“前大后小”的分配原则适用于按( )设计的传动链。 A.最小等效转动惯量原则 B.输出轴的转角误差最小原则 C.重量最轻原则(小功率装置) D.重量最轻原则(大功率装置) 5,闭环控制的驱动装置中,齿轮减速器位于前向通道,所以它的()。 A.传动误差不影响输出精度,但回程误差影响输出精度 B.回程误差不影响输出精度,但传动误差影响输出精度 C.传动误差和回程误差都会影响输出精度 D.传动误差和回程误差都不会影响输出精度 6.频矩特性表示步进电机( )与脉冲频率的关系。 A.额定动态转矩 B.最大动态转矩 C.最大静态转矩 D.最大启动转矩 7.STD总线的A/D转换接口模板中,除A/D转换器及STD总线接口逻辑之外,还应设 置()。 A.采样保持器与通道选择器 B.通道选择器与多路开关 C.多路开关与采样保持器 D.V/I转换器与信号调理电路 8.开放式体系结构中的VLSI是指( )。 A.不同的用户层次 B.用户的特殊要求 C.超大规模集成电路 D.模块化体系结构 749
得 分 评卷人 二、选择题(每小题 2分,共 20分) 1.数控机床进给系统的伺服电机属于设备的( )。 A.能源部分 B.执行机构 C.驱动部分 D.控制及信息处理单元 2.在工业机器人的设计中,( )是理论分析阶段要进行的工作之一。 A.传感器的选择及精度分析 B.技术经济性分析 C.控制系统硬件电路设计 D.控制系统软件配置与调试 3.为提高机电一体化机械传动系统的固有频率,应设法( )。 A.增大系统刚度 B.增大系统转动惯量 C.增大系统的驱动力矩 D.减小系统的摩擦阻力 4.多级齿轮传动中,各级传动比“前大后小”的分配原则适用于按( )设计的传动链。 A.最小等效转动惯量原则 B.输出轴的转角误差最小原则 C.重量最轻原则 (小功率装置) D.重量最轻原则(大功率装置) 5.闭环控制的驱动装置中,齿轮减速器位于前向通道,所以它的( )。 A.传动误差不影响输出精度,但回程误差影响输出精度 B.回程误差不影响输出精度,但传动误差影响输出精度 C.传动误差和回程误差都会影响输出精度 D.传动误差和回程误差都不会影响输出精度 6.频矩特性表示步进电机( )与脉冲频率的关系。 A.额定动态转矩 B.最大动态转矩 C.最大静态转矩 D.最大启动转矩 7. STD总线的 A/D转换接口模板中,除 AjD转换器及 STD总线接口逻辑之外,还应设 置 ( )。 A 采样保持器与通道选择器 B.通道选择器与多路开关 C.多路开关与采样保持器 D. V/I转换器与信号调理电路 8.开放式体系结构中的V LSI是指( )。 A.不同的用户层次 B.用户的特殊要求 C.超大规模集成电路 U.模块化体系结构 749
9.频率响应函数是传感器的()。 A.静态特性指标 B.动态特性指标 C.输人特性参数 D.输出特性参数 10.为保证系统安全可靠工作,下列机电一体化产品中,( )需要进行抗干扰设计。 A.自动洗衣机 B.自动照相机 C.滚简型绘图机 D.数控机床 得 分 评卷人 三、简答题(每小题5分,共20分) 1.步进电机是如何实现速度控制的? 2.试述直流电机伺服系统中脉宽调制放大器的基本工作原理。 3.开放式体系结构的主要特点是什麽? 4.简述STD总线微机控制系统的主要特点。 得 分 评卷人 四、分析题(12分)》 在使用光电编码器测量位移或转速时,什麽是高速端测量方案,什麽是低速端测量方案? 各有什么特点。 得 分 评卷人 五、计算题(12分) 1.(6分)已知传动机构如图所示,试计算电机轴上的总等效惯量。(列出算式) 负载 电机 750
9.频率响应函数是传感器的( 静态特性指标 输人特性参数 B.动态特性指标 D.输出特性参数 10.为保证系统安全可靠工作,下列机电一体化产品中,( )需要进行抗干扰设计。 自动洗衣机 滚筒型绘图机 B.自动照相机 D.数控机床 得 分 评卷人 三、简答题 〔每小题 5分.共 20分) .步进电机是如何实现速度控制的? .试述直流电机伺服系统中脉宽调制放大器的基本工作原理 。 3.开放式体系结构的主要特点是什磨? 4.简述 STD总线微机控制系统的主要特点。 得 分 评卷人 四、分析题 (12分) 在使用光电编码器测量位移或转速时 ,什磨是高速端测量方案 ,什磨是低速端测量方案? 各有什么特点 。 得 分 评卷人 五、计算题 (12分 ) (; 分)已知传动机构如图所示,试计算电机轴上的总等效惯量。(列出算式) 7:}0
2.(6分)已知某传动机构,电机转子惯量Jm=0.005kgm,负载惯量J1=0.04kgm2, 试确定传动比i为何值时可使负载获得最大加速度? 得分 评卷人 六、综合题(16分) 已知五自由度机器人,采用直流电机控制,关节转角的测量采用增量式编码器,具有手动 示教和再现功能,试确定其控制计算机及控制方案。 提示:画出控制方案原理图,并作简要说明。 751
2. (6分)已知某传动机构,电机转子惯量Jm=O. 005kg mz,负载惯量 J ,,=0. 04 kg mZ 试确定传动比 i为何值时可使负载获得最大加速度? 得 分 评卷人 六、综合题(16分) 已知五 自由度机器人,采用直流电机控制 ,关节转角的测量采用增量式编码器,具有手动 示教和再现功能,试确定其控制计算机及控制方案。 提示 :画出控制方案原理 图,并作简要说明。 7:>1
试卷代号:1118 中央广播电视大学2007一2008学年度第二学期“开放本科”期末考试 机电一体化系统设计基础试题答案及评分标准 (供参考) 2008年7月 一、判断题(每小题2分,共20分) 1.+ 2.- 3.- 4. 5.+ 6.+ 7.- 8.+ 9. 10.+ 二、选择题(每小题2分,共20分) 1.C 2.A 3.A 4.D 5.B 6.B 7.C 8.C 9.B 10.D 三、简答题(每题5分,共20分) 1.答:步进电机的运动是由输入的电脉冲信号控制的,每当电机绕组接收一个脉冲,转子 就转过一个相应的角度,其角位移量与输入脉冲的个数严格成正比,在时间上与输入脉冲同 步。因而,只要控制输入脉冲的数量、频率和电机绕组的相序,即可得到所需转动的速度和 方向。 2.答:脉宽调制放大器是直流伺服电机常用的晶体管驱动电路。利用大功率晶体管的开 关作用,将直流电源电压转换成一定频率的方波电压,施加于直流电机的电枢,通过对方波脉 冲宽度的控制,改变电枢的平均电压,使电机的转速得到调节。 3.答:开放式体系结构是近年来在电子工业和计算机工业中流行的一种设计思想,其主要 特点是:向未来的VLSI开放;向不同用户层次开放;向用户的特殊要求开放;采用模块化 结构。 4.答:STD总线微机控制系统的主要特点: (1)采用小板结构,高度的模块化,其功能模板结构灵活,可靠性高,硬件冗余小,成本低。 (2)模板设计具有严格的标准和广泛的兼容性。 (3)面向J/O的设计,具有强大的1/()扩展能力,使控制系统非常适合工业控制的应用。 (4)高可靠性。 752
试卷代号:1118 中央广播电视大学2007-2008学年度第二学期“开放本科”期末考试 机电一体化系统设计基础 试题答案及评分标准 (供参考) Zoos年 z月 一、判断题(每小题 2分,共 20分) 1.十 2.一 3.一 4。一 5。十 6.十 7.一 8.+ 9.一 10.+ 二、选择题(每小题 2分,共 20分) 1. C 2. A 3. A 4. D 5. B 6.B 7.C 8.C 9.B 10.D 三、简答题 (每题 5分 ,共 20分) 1.答:步进电机的运动是由输人的电脉冲信号控制的,每当电机绕组接收一个脉冲,转子 就转过一个相应的角度 ,其角位移 量与输人脉冲的个数严格成正 比,在时 间上与输人脉冲同 步。因而,只要控制输人脉冲的数量、频率和电机绕组的相序,即可得到所需转动的速度和 方向。 2.答:脉宽调制放大器是直流伺服电机常用的晶体管驱动电路。利用大功率晶体管的开 关作用 ,将直流电源电压转换成一定频率的方波电压,施加于直 流电机的电枢 ,通过对方波脉 冲宽度的控制,改变电枢的平均电压,使电机的转速得到调节。 3.答:开放式体系结构是近年来在电子工业和计算机工业中流行的一种设计思想,其主要 特点是:向未来的 VLSI开放;向不同用户层次开放;向用户的特殊要求开放;采用模块化 结构 。 4.答:STD总线微机控制系统的主要特点: (1)采用小板结构,高度的模块化,其功能模板结构灵活,可靠性高,硬件冗余小,成本低。 <2)模板设计具有严格的标准和广泛的兼容性。 (3)面向I/O的设计,具有强大的 I/()扩展能力,使控制系统非常适合工业控制的应用。 (4)高可靠性。 752
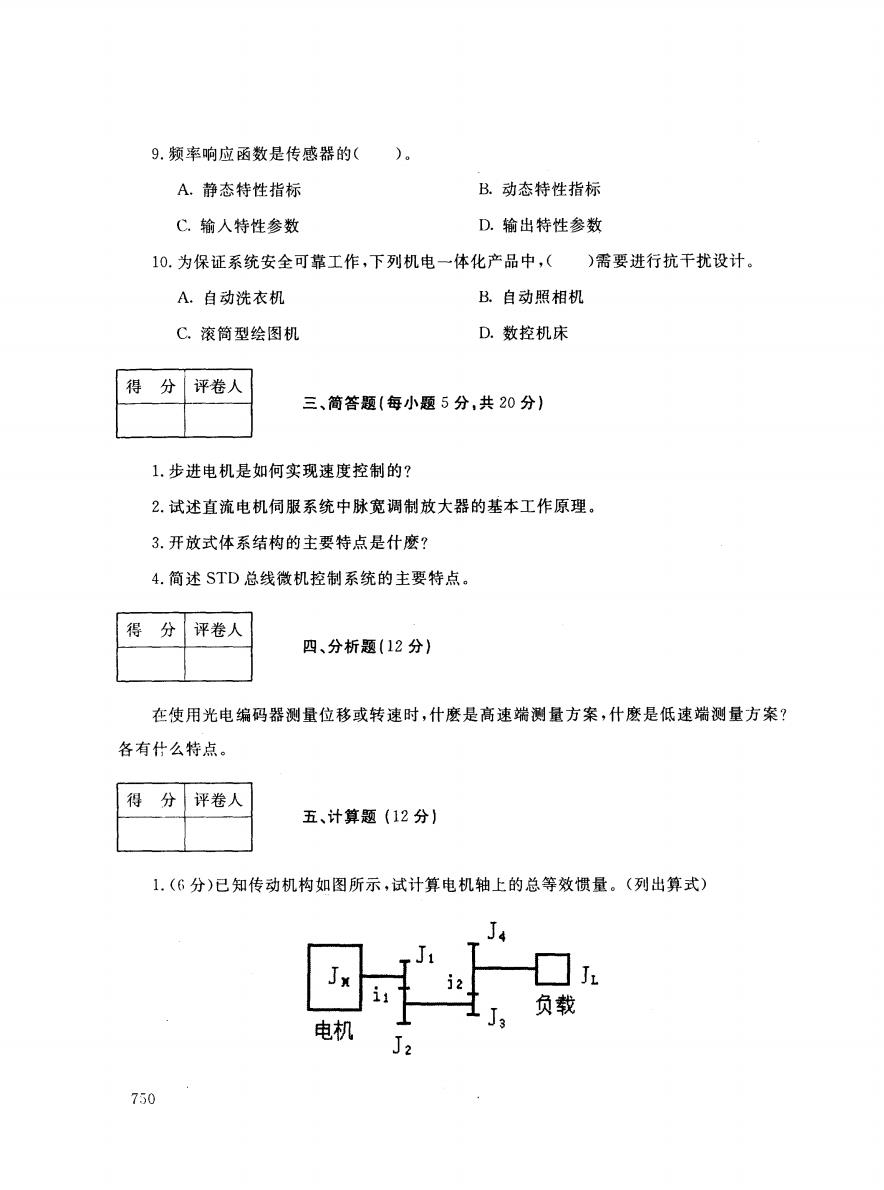
四、分析题(12分) 解答:使用光电编码器测量位移或转速有高速端测量和低速端测量两种方案。 (1)高速端测量:将编码器安装在电机轴上的测量方案。高速端测量的特点:同样的测 精度要求,对编码器的测量精度要求较低。传动件包括在闭环之外,传动误差直接影响输出精 度,传动误差无法通过控制进行补偿,因此对传动链的精度要求较高。 (2)低速端测量:将编码器安装在负载轴上的测量方案。低速端测量的特点:对编码器的 精度要求较高,但传动链包括在闭环内,从而通过闭环来消除传动误差,对传动链的精度要求 较低。 五、计算题(12分) 1.(6分)解: 等效惯量可以分为以下几个部分来计算 (1)电机轴上的元件 J4=J1十JM (2)中间轴上的元件 Je-(:+J,) (3)负载轴上的元件 。=+) 总的折算惯量为 J.=J+J2十J 2.(6分)解: 由电机驱动齿轮系统和负载的计算模型可知,当负载换算到电机轴上的惯量J1等于转 子惯量JM时,负载可获得最大加速度,即 Jw/i=Jm 由此得传动比 阴 0.04 i=√0.005 =2.828 753
四、分析题(12分 ) 解答:使用光电编码器测量位移或转速有高速端测量和低速端测量两种方案。 (1)高速端测量:将编码器安装在电机轴上的测量方案。高速端测量的特点:同样的测量 精度要求,对编码器的测量精度要求较低。传动件包括在闭环之外,传动误差直接影响输出精 度,传动误差无法通过控制进行补偿,因此对传动链的精度.要求较高。 (2)低速端测量 :将编码器安装在负载轴上的测量方案。低速端测量的特点 :对编码器的 精度要求较高,但传动链包括在 闭环内,从而通过闭环来消除传动误差 ,对传动链 的精度要求 较低 。 五、计算题(12分) 1. (6分)解 : 等效惯量可以分为以下几个部分来计算 (1)电机轴上 的元件 Jel -J1 TJM <2)中间轴上的元件 1,, .} e2一万Uz十Js) (3)负载轴上的元件 1 .} e3一而CJ‘十J‘) 总的折算惯量为 Je-Jel TJe2 }Je} 2. (6分)解 : 由电机驱动齿轮系统和负载的计算模型可知,当负载换算到电机轴上的惯量 J.等于转 子惯量 JM时,负载可获得最大加速度 ,即 J,八2=Jm 由此得传动比 一J }, 一了黑 一2. 828 753
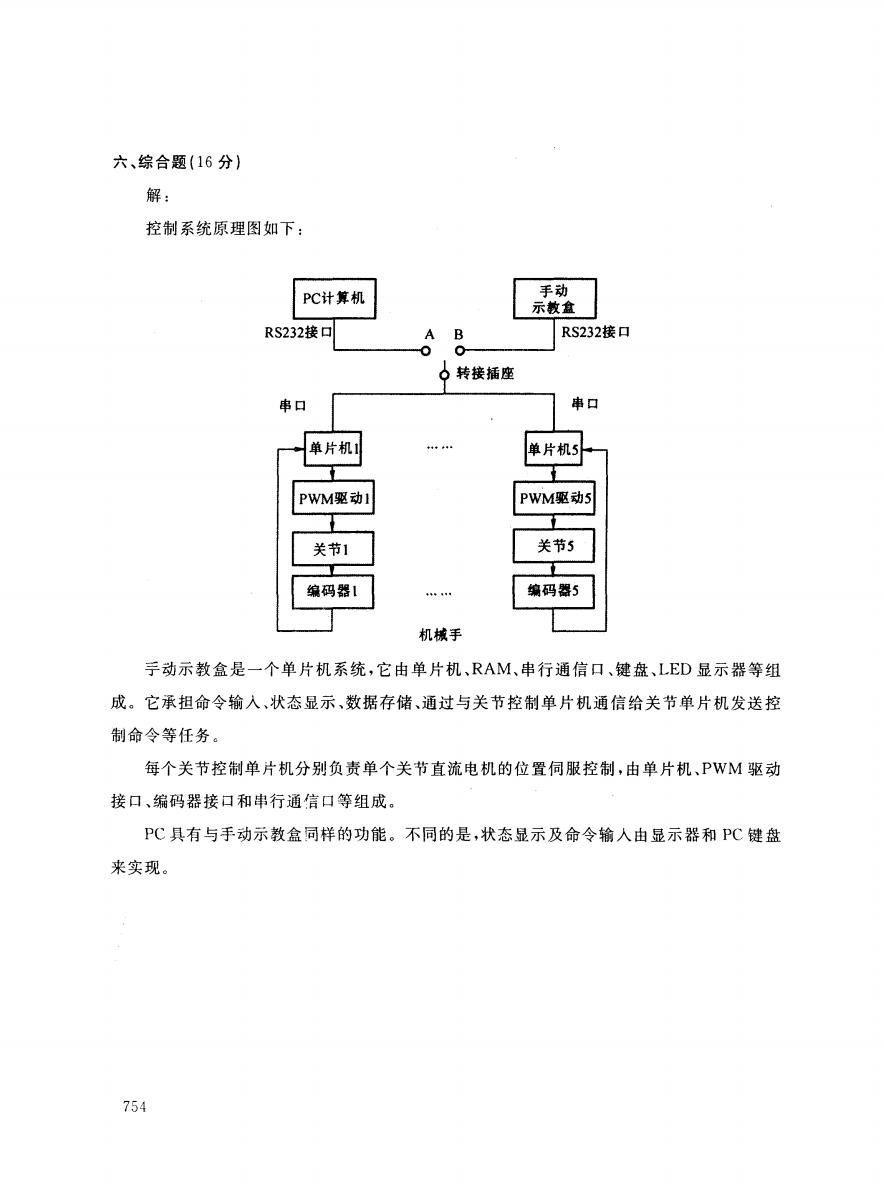
六、综合题(16分) 解: 控制系统原理图如下: PC计算机 手动 示教盒 RS232接▣ A B RS232接口 转接插座 串口 串口 单片机1 +4+4… 单片机5 PWM驱动1 PWM驱动5 关节1 关节5 编码器1 编码器5 机核手 手动示教盒是一个单片机系统,它由单片机、RAM、串行通信口、键盘、LED显示器等组 成。它承担命令输入、状态显示、数据存储、通过与关节控制单片机通信给关节单片机发送控 制命令等任务。 每个关节控制单片机分别负责单个关节直流电机的位置伺服控制,由单片机、PWM驱动 接口、编码器接口和串行通信口等组成。 PC具有与手动示教盒司样的功能。不同的是,状态显示及命令输人由显示器和P℃键盘 来实现。 754
六、综合题 (16分) 解 : 控制系统原理图如下: RS232接 口 RS232接口 机械手 手动示教盒是一个单 片机系统,它 由单片机 、RAM、串行通信 口、键盘 、LED显示器等组 成。它承担命令输人、状态显示、数据存储、通过与关节控制单片机通信给关节单片机发送控 制命令等任务。 每个关节控制单片机分别负责单个关节直流电机的位置伺服控制,由单片机、PWM驱动 接 口、编码器接口和串行通信 口等组成。 PC具有与手动示教盒同样的功能。不同的是,状态显示及命令输入由显示器和 PC键盘 来实现 。 754