试卷代号:1118 座位号 中央广播电视大学2006-一2007学年度第一学期“开放本科”期末考试 机械专业机电一体化系统设计基础 试题 2007年1月 题 号 二 三 四 五 总 分 分 数 得 分 评卷人 一、判断题(判断下列所述是否正确,正确填入“十”号,错误则填“一” 号。每题2分,共24分) 1.接口技术是自动控制技术中的一个方面,它和计算机与信息处理技术密切相关。 ( 2.机电一体化产品的开发性设计是在保持原理方案不变条件下,对产品功能及结构的重 新设计。 () 3.在全自动洗衣机产品的设计过程中,控制系统软件的设计是理论分析阶段的红务之 …。 () 4.回程误差并非只有传动机构反向时才会发生,即使是单向回转,回程误差对传动精度 也可能有影响。 () 5.对应于某一频率,只有负载小于步进电机在该频率的最大动态转矩时,电机才能正常 工作。 () 6.在工业控制计算中,地址总线用于确切指定与之通信的外部硬件,控制总线则用于传 送数据。 () 7.STD总线的工控机常作为工业PC机的前端控制机,完成实时的在线控制。() 8.为适应工业仪表的要求,D/A的输出要配接V/I转换器。 () 9.通常,工业控制机与独立设备连接时,均采用光电型模板。 () 10.迟滞是传感器静态特性指标之一,反映传感器输入量按同一方向做全量程连续多次 变动时,输出输入特性曲线的不一致性。 () 11.临界频率是接触式传感器的动态特性指标之一。 () 12.绝对式光电编码器的输出量为脉冲信号,可以同时用于位置和速度测量。 () 766
试卷代号:1118 座位号巨二 中央广播电视大学2006--2007学年度第一学期“开放本科”期末考试 机械专业 机电一体化系统设计基础 试题 20Q7勺 题 号 四 } 一往 卜u}分 分 数 {l ! 得 分 评卷人 一、判断题(判断下列所述是否正确,正确填入“十”号,错误则填“一” 号。每题 2分 ,共 24分) 1,接 口技术是 自动控制技术中的一个方面 ,它和计算机与信息处理技术密切相关 。 r ) 2.机电一体化产品的开发性设计是在保持原理方案不变条件下,对产品功能及结构的重 新设计一。 戈 ) 3.在全 自动洗衣机产 品的设计过程 中,控制 系统软件 的设计是理 沦分析 阶段的任务之 一。 〔 ) 4.回程误差并非只有传动机构反 向时才会发生 ,即使是单 向回转 ,回程 }sz;:}差对传动精度 也可能有影响。 ( ) 5.对应于某一频率 ,只有负载小于步进 电机在该频率 的最大动态转矩时 ,电机才能正常 工作。 ( ) 6.在工业控制计算中,地址总线用于确切指定与之通信的外部硬件,控制总线则用于传 送数据 。 ( ) 7. STD总线的工控机常作为工业 PC机的前端控制机,完成实时的在线控制。 ( ) 8.为适应工业仪表的要求,D/A的输出要配接 V/I转换器。 ( ) 9.通常,工业控制机与独立设备连接时,均采用光电型模板。 ( ) 10.迟滞是传感器静态特性指标之一,反映传感器输人量按同一方向做全量程连续多次 变动时,输出输人特性曲线的不一致性。 ( ) 11.临界频率是接触式传感器的动态特性指标之一。 ( ) 12.绝对式光电编码器的输出量为脉冲信号,可以同时用于位置和速度测量。 ( ) 766
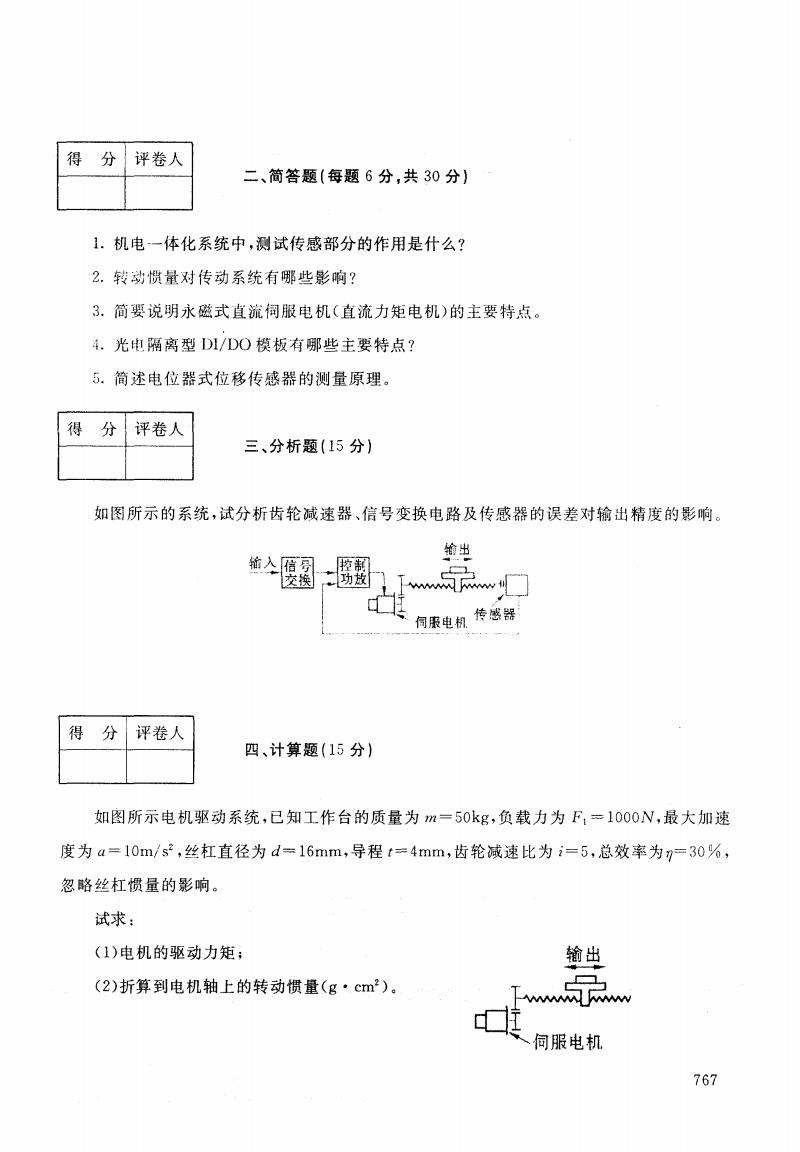
得分 评卷人 二、简答题(每题6分,共30分)】 1.机电一体化系统中,测试传感部分的作用是什么? 2.转动惯量对传动系统有哪些影响? 3.简要说明永磁式直流伺服电机(直流力矩电机)的主要特点。 4.光电隔离型D1/DO模板有哪些主要特点? 5.简述电位器式位移传感器的测量原理。 得 分 评卷人 三、分析题(15分】 如图所示的系统,试分析齿轮减速器、信号变换电路及传感器的误差对输出精度的影响。 输出 猫入 信号 控制 交换 功放 w 伺聚电机传感器 得 分 评卷人 四、计算题(15分) 如图所示电机驱动系统,已知工作台的质量为m=50kg,负载力为F,=1000N,最大加速 度为a=10m/s2,丝杠直径为d=16mm,导程t=4mm,齿轮减速比为i=5,总效率为0=30%, 忽略丝杠惯量的影响。 试求: (1)电机的驱动力矩; 输出 (2)折算到电机轴上的转动惯量(g·cm2)。 伺服电机 767
得 分 评卷人 二、简答题 (每题 6分,共 30分) 机电一体化系统中,测试传感部分的作用是什么? 转动惯量对传动系统有哪些影响? 简要说明永磁式直流伺服电机(直流力矩电机)的主要特点 。 光r} ,隔离型 lI/DC}模板有哪些 主要特点? 简述 电位器式位移传感器的测量原理 。 得 分 评卷人 三、分析题(15分) 如图所示 的系统,试分析齿轮减速器 、信号变换电路及传感器的误差对输 出精度的影响。 -'} ta^#}一翔"('} I}}c -_,L i.}- } 几」乌 象 伺服电机传感器 得 分 评卷人 四、计算题 (15分 ) 如图所示电机驱动系统 , 度为 u= lOm/s`,丝杠直径为 忽略丝杠惯量的影响。 试求 : }1}电机的驱动力矩 ; 已知工作台的质量为 m=50kg,负载力为 F,二1000N,最大加速 d=16mm,导程t=4mm,齿轮减速比为2=5,总效率为、=3000, (2)折算到电机轴上的转动惯量(g " em2 ) o 司\ ,向服电机 767
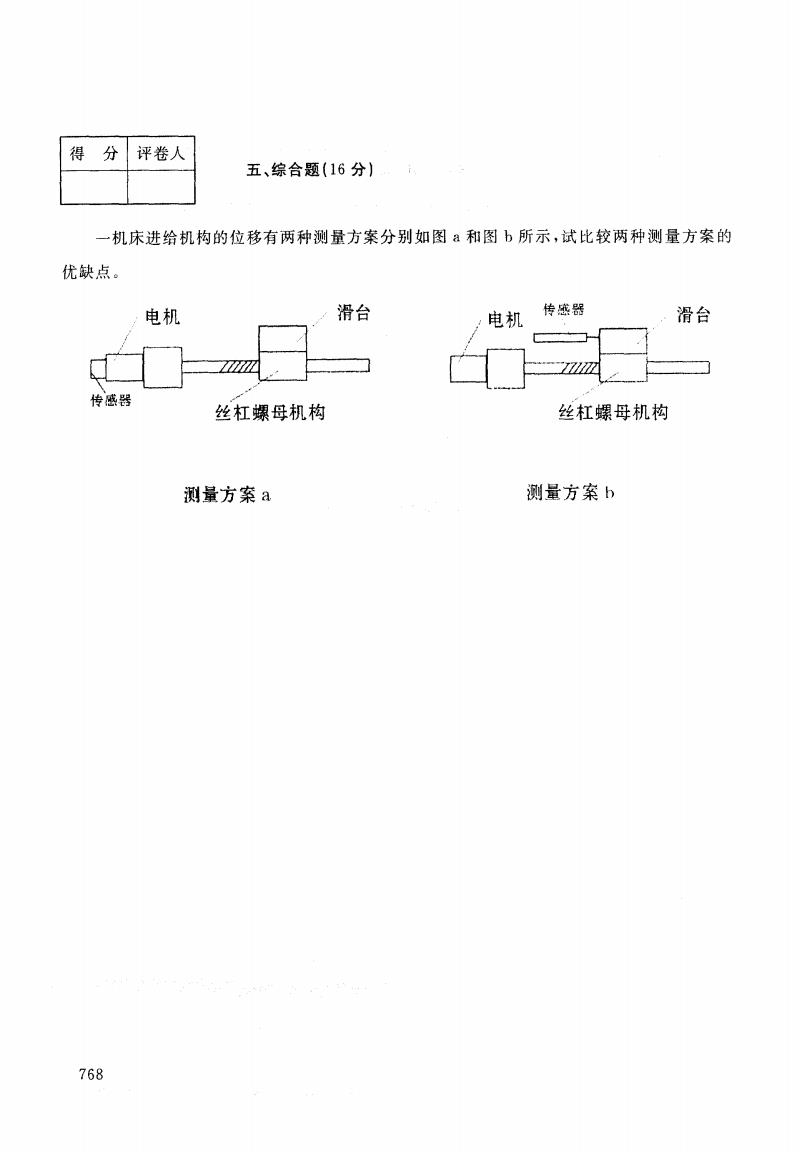
得 分 评卷人 五、综合题(16分) 一机床进给机构的位移有两种测量方案分别如图a和图b所示,试比较两种测量方案的 优缺点。 电机 滑台 电机 传感器 滑台 传感器 丝杠螺母机构 丝杠螺母机构 测量方案a 测量方案b 768
得 分 评卷人 五、综合题(16分) 一机床进给机构的位移有两种测量方案分别如图a和图 h所示,试比较两种测量方案的 优缺点。 电机 滑台 传感器 丝杠螺母机构 丝杠螺母机构 测量方案a 测量方案 b 768
试卷代号:1118 中央广播电视大学2006一2007学年度第一学期“开放本科”期末考试 机械专业 机电一体化系统设计基础 试题答案及评分标准 (供参考) 2007年1月 一、判断题(每题2分,共24分) 1.- 2.- 3.- 4.+ 5.+ 6. 7.+ 8.+ 9.+ 10.- 11.+ 12.- 二、简答题(每题6分,共30分)】 1.答:测试传感部分的作用:对系统运行中所需要的本身和外界环境的各种参数及状态 进行检测,传输到信息处理单元,经分析处理后产生控制信息。 2.答:转动惯量增大使机械负载增加,功率消耗大;使系统相应速度变慢,降低灵敏度;使 系统固有频率下降,容易产生谐振。 3.答:直流力矩电机有两个特点:(1)可以不经过诚速机构而直接驱动负载,由输人的电 压信号直接调节负载的转速:(2)在以位置控制方式的伺服系统中,电机可工作于堵转状态。 4,答:光电隔离型D1/DO模板的特点: (1)输人信号与输出信号在电气上完全隔离,抗干扰能力强; (2)无触点,耐冲击,寿命长,可靠性高: (3)响应速度快,易与逻辑电路配合。 5.答:电位器式位移传感器的测量原理为: 电位器的可动电刷与被测物体相连,物体的位移引起电位器移动端电阻的变化,电阻值的 变化量即反映出位移的大小和方向。通常,由电源电压把电阻的变化转换为电压输出。 三、分析题(15分) 解答: 齿轮诚速器位于前向通道,误差的低频分量不影响输出精度,因此允许有一定的间隙误 769
试卷代号:1118 中央广播电视大学2006-2007学年度第一学期“开放本科”期末考试 机械专业 机电一体化系统设计基础 试题答案及评分标准 (供参考) 2007年 1月 一、判断题(每题 2分,共 24分) 1.一 2.一 3.一 4.+ 5.+ 6.一 7.+ 8.+ 9.+ 10.一 11.+ 12.一 二 、简答题(每题 6分 ,共 30分) 1.答 :测试传感部分的作用:对系统运行 中所需要 的本身和外 界环境的各种参数及状态 进行检测,传输到信息处理单元 ,经分析处理后产生控制信息 。 2.答 :转动惯量增大使机械负载增加 ,功率消耗大 ;使系统相应速度变慢 ,降低灵敏度 :使 系统固有频率下降,容易产生谐振 。 3.答 :直流力矩电机有两个特点 :(1)可以不经过减速机构而直接驱动负载 ,由输入的电 压信号直接调节负载的转速 ;(2)在以位置控制方式的伺服系统中,电机可工作于堵转状态。 4.答:光电隔离型 L)1/DO模板的特点 : (l输人信号与输出信号在电气上完全隔离,抗干扰能力强; (2)无触点,耐冲击,寿命长,可靠性高; (3)响应速度快,易与逻辑电路配合。 5.答:电位器式位移传感器的测量原理为: 电位器的可动电刷与被测物体相连,物体的位移引起 电位器移动端电阻的变化 ,电阻值的 变化量即反映出位移的大小和方向。通常,由电源电压把电阻的变化转换为电压输出。 三、分析题(15分) · 解答 : 齿轮减速器位于前向通道 ,误差的低频分量不影响输 出精度 ,因此允许有一定的间隙误 769
差;而误差的高频分量影响输出精度,因此应尽量减小传动误差。 信号变换电路位于输人通道,其误差的低频分量影响系统的输出精度,因此信号变换电路 应有较高的静态精度;而误差的高频分量不影响输出精度,因此允许该电路有一定的高频噪 声。 传感器是位于反馈通道上的环节,其对输出精度的影响与位于输入通道的信号变换电路 相同。 四、计算题(15分) 解: (1)计算电机上的负载力矩(10分) 负载力由外负载力、惯性负载力两部分构成 外负载力 F1=1000N 惯性负载力F。 Fm=m·a=50×10=500N 负载力矩 工.=·云(k+)…}-吉010000)· 75 2元 =0.63Nm (2)计算转动惯量(5分) 0.4、2、 )×50×103=8.1g·cnm 五、综合题(16分) 解: 方案a为高速端间接测量方案,传感器安装在电机的尾部,通过测量电机的转角实现对工 作台位移的间接测量;可选用光电编码器式传感器或者磁电式编码器,同样的测量精度要求, 对编码器的测量精度要求较低。传感器在电机尾部,布置容易:丝杠螺母机构包括在闭环之 外,传动误差直接影响输出精度,传动误差无法通过控制进行补偿,由于滚珠丝杠的精度可以 很高,因此这个方案是即经济又实用的。 方案b为低速端直接测量方案:传感器安装在工作台上,直接测量工作台的位移;可选用 光栅式位移器、感应同步器或者电位计式位移传感器:同样的测量精度要求,对传感器的精度 要求较高,成本比方案a高;但丝杠螺母机构包括在闭环内,从而通过闭环来消除传动误差,对 丝杠螺母机构的精度要求较低;传感器布置较困难;不适合工作台的位移较大的场合。 770
差;而误差的高频分量影响输出精度,因此应尽量减小传动误差。 信号变换电路位于输人通道,其误差的低频分量影响系统的输出精度,因此信一号变换电路 应有较高的静态精度;而误差的高频分量不影响输出精度,因此允许该电路有一定的高频噪 声 。 传感器是位于反馈通道上的环节,其对输出精度的影响与位于输人通道的信号变换电路 相同。 四、计算题 (15分) 解: C1}计算电机上的负载力矩(10分) 负载力由外负载力、惯性负载力两部分构成 外负载力 F, =10001V 惯性负载力 Fm 凡 =rn " u=50 X 10=500N 帅 汀 、 。咨 乃 日 j.工 ﹂价卜口 一一 1 一 负载力矩 }n一手·}t} .(。一十F, , 、,。。。:))·。}、>1_3 = 0. fi,3Nr CZ)计算转动惯量(5分) 、一声}}n)2一〔 0. 4 5火2}〕}C50X10}一8·1 }.‘CIln 五、综合题 (16分 ) 解 : 方案。为高速端间接测量方案,传感器安装在电机的尾部,通过测量电机的转角实现对丁 作台位移的间接测量;可选用光电编码器式传感器或者磁电式编码器,同样的测量精度要求, 对编码器的测量精度要求较低。传感器在电机尾部,布置容易;丝杠螺母机构包括在闭环之 外,传动误差直接影响输出精度,传动误差无法通过控制进行补偿,由于滚珠丝杠的精度可以 很高,因此这个方案是即经济又实用的。 方案 b为低速端直接测量方案:传感器安装在工作台上,直接测量工作台的位移;可选用 光栅式位移器、感应同步器或者电位计式位移传感器;同样的测量精度要求,对传感器的精度 要求较高,成本比方案 a高;但丝杠螺母机构包括在闭环内,从而通过闭环来消除传动误差,对 丝杠螺母机构的精度要求较低;传感器布置较困难;不适合工作台的位移较大的场合。 770