试卷代号:1118 座位号■■ 中央广播电视大学2007一2008学年度第一学期“开放本科”期末考试 机械专业 机电一体化系统设计基础 试题 2008年1月 题号 二 三 四 五 六 总 分 分数 得 分 评卷人 一、判断题(每小题2分,共20分) 判断下列所述是否正确,正确填入“十”号,错误则填“一”号。 1.自动控制技术是机电一体化六个相关技术之一,而接口技术是自动控制技术中的一个 方面。() 2.同服驱动系统是实现电信号到机械动作的转换的装置和部件。() 3.机电一体化产品的适应性设计是指对产品功能及结构重新进行的设计。() 4.在全自动洗衣机产品的设计过程中,控制系统软件的设计是理论分析阶段的任务之一。 () 5.传动机构的转动惯量取决于机构中传动件的质量、转速和尺寸参数。() 6.直流伺服电机的驱动电路中,脉宽调制放大器由于管耗大,因而多用于小功率系统。 () 7.微机系统的数据总线中,在任何给定时刻,数据流只允许往一个方向传输。() 8.工业P℃机与个人计算机IBM PC的最大差别是把IBM PC中的母板分成了多块PC 插件。() 9.为适应工业仪表的要求,D/A的输出要配接V/I转换器。() 10.迟滞是传感器静态特性指标之一,反映传感器输入量按同一方向做全量程连续多次变 动时,输出输入特性曲线的不一致性。() 729
试卷代号:1118 座位号仁工] 中央广播电视大学2007-2008学年度第一学期“开放本科”期末考试 机械专业 机电一体化系统设计基础 试题 2008年 1月 题 号 四 五 六 总 分 分 数 得 分 评卷人 一、判断题(每小题 2分,共 20分) 判断下列所述是否正确 ,正确填入“一斗一”号 ,错误则填“一”号 。 1 方面。 2 3 4 自动控制技术是机电一体化六个相关技术之一,而接口技术是自动控制技术中的一个 ( ) .伺服驱动系统是实现电信号到机械动作的转换的装置和部件。( ) .机电一体化产品的适应性设计是指对产品功能及结构重新进行的设计。( ) .在全自动洗衣机产品的设计过程中,控制系统软件的设计是理论分析阶段的任务之一。 ( ) .传动机构的转动惯量取决于机构中传动件的质量、转速和尺寸参数。( ) .直流伺服电机的驱动电路中,脉宽调制放大器由于管耗大,因而多用于小功率系统。 7.微机系统的数据总线中,在任何给定时刻,数据流只允许往一个方向传输。( ) 8.工业 PC机与个人计算机 IBM PC的最大差别是把 IBM PC中的母板分成了多块 PC 插件 。( ) 9.为适应工业仪表的要求,D/A的输出要配接 V/I转换器。( ) 10.迟滞是传感器静态特性指标之一,反映传感器输人量按同一方向做全量程连续多次变 动时,输出输人特性曲线的不一致性 。( ) r29
得分 评卷人 二、选择题(每小题2分,共20分) 1.HRGP1A喷漆机器人中的旋转变压器属于系统中的()。 A.能源部分 B.测试传感部分 C.驱动部分 D.执行机构 2.在机电一体化产品的开发过程中,总体方案设计完成后应立即进行()。 A.样机设计(详细设计)》 B.此方案的评审,评价 C.理论分析(数学模型) D.可行性与技术经济分析 3.在机电一体化系统中,机械传动要满足伺服控制的基本要求是()。 A,精度、稳定性、快速响应性 B.精度、稳定性、低噪声 C.精度、高可靠性、小型轻量化 D.精度、高可靠性、低冲击振动 4.在机械传动系统中,用于加速惯性负载的驱动力矩为( )。 A.电机力矩 B.负载力矩 C.折算负载力矩 D.电机力矩与折算负载力矩之差 5,多级齿轮传动中,各级传动比“前大后小”的分配原则适用于按( )设计的传动链。 A.最小等效转动惯量原则 B.输出轴的转角误差最小原则 C.重量最轻原则(小功率装置) D.重量最轻原则(大功率装置) 6.在下列电机中,()既可通过闭环实现速度或位置控制,又可作步进方式运行,且电 机转速不受负载影响,稳定性高。 A.步进电机 B.直流伺服电机 C.交流同步伺服电机 D.笼型交流异步电机 7.通常,TTL电平接口不用于( )。 A.工控机与独立设备的连接 B.操作面板上开关状态的输入 C.驱动带电气隔离的继电器 D.输出指示灯控制 8.在工业控制计算机中,控制总线的功能是()。 A,确切指定与之通信的外部硬件 B.确定总线上信息流的时序 C.在计算机内部传输数据 D.连接控制电源 9.静态刚度属于传感器的( )。 A.静态特性指标 B.动态特性指标 C.输入特性参数 D.输出特性参数 10.为保证系统安全可靠工作,下列机电一体化产品中,( )需要进行抗干扰设计。 A,自动洗衣机 B.自动照相机 C.滚简型绘图机 D.数控机床 730
得 分 评卷人 二、选择题(每小题 2分 ,共 20分 ) 1. HRGP-lA喷漆机器人中的旋转变压器属于系统中的( )。 A.能源部分 }3,测试传感部分 C.驱动部分 D.执行机构 2.在机电一体化产品的开发过程中,总体方案设计完成后应立即进行( )。 A.样机设计(详细设计) B.此方案的评审、评价 C.理论分析(数学模型) D.可行性与技术经济分析 3.在机电一体化系统中,机械传动要满足伺服控制的基本要求是( )。 A.精度、稳定性、快速响应性 B,精度、稳定性、低噪声 C.精度、高可靠性、小型轻量化 D.精度、高可靠性、低冲击振动 4.在机械传动系统中,用于加速惯性负载的驱动力矩为( )。 A.电机力矩 B.负载力矩 C.折算负载力矩 D.电机力矩与折算负载力矩之差 5.多级齿轮传动中,各级传动比“前大后小”的分配原则适用于按( )设计的传动链。 A.最小等效转动惯量原则 B.输出轴的转角误差最小原则 C.重量最轻原则 (小功率装置) D.重量最轻原则(大功率装置) 6.在下列电机中,( )既可通过闭环实现速度或位置控制,又可作步进方式运行,且电 机转速不受负载影响,稳定性高 。 A.步进电机 B.直流伺服电机 C.交流同步伺服电机 D.笼型交流异步电机 7.通常 ,TTL电平接 口不用于( )。 A.工控机与独立设备的连接 B,操作面板上开关状态的输人 C.驱动带电气隔离的继电器 D.输出指示灯控制 8.在工业控制计算机中,控制总线的功能是( )。 A.确切指定与之通信的外部硬件 B.确定总线上信息流的时序 C.在计算机内部传输数据 D.连接控制电源 9.静态刚度属于传感器的( )。 A.静态特性指标 }3.动态特性指标 C.输人特性参数 D.输出特性参数 10.为保证系统安全可靠工作,下列机电一体化产品中,( )需要进行抗干扰设计。 A。自动洗衣机 B.自动照相机 G.滚筒型绘图机 l.数控机床 730
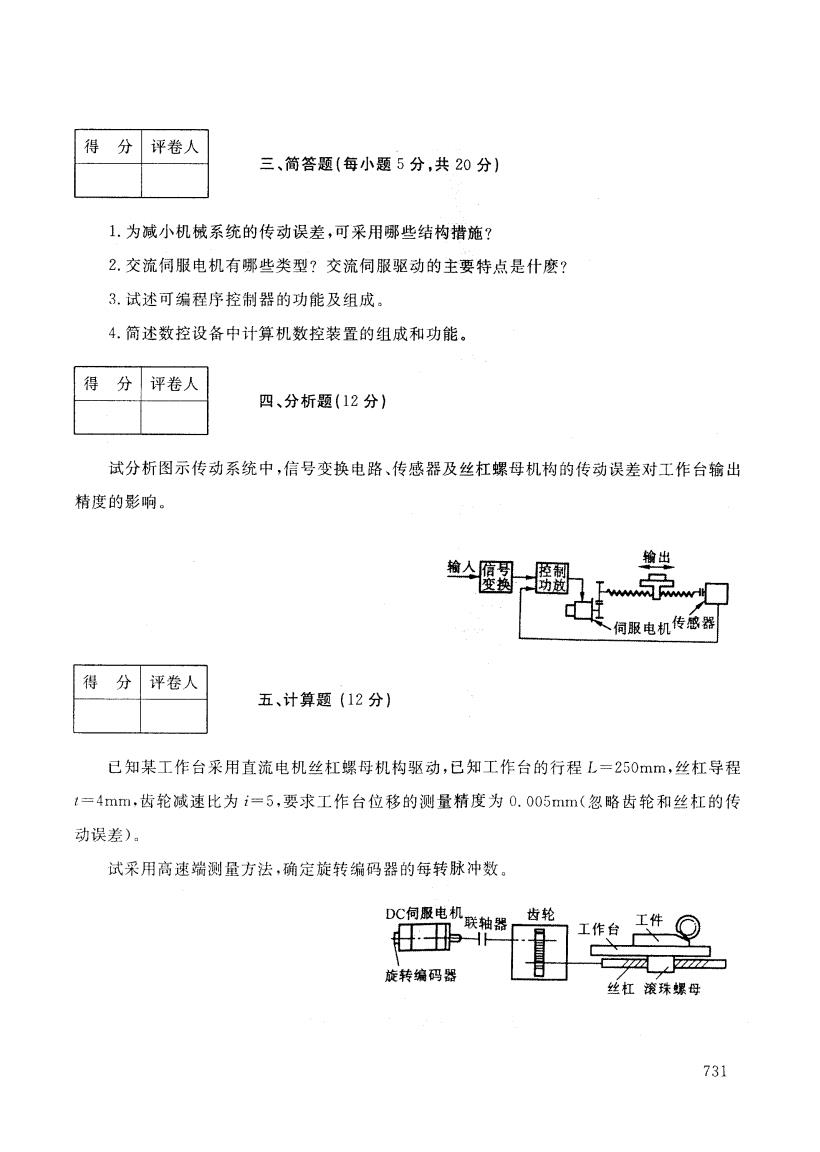
得分 评卷人 三、简答题(每小题5分,共20分) 1.为减小机械系统的传动误差,可采用哪些结构措施? 2交流伺服电机有哪些类型?交流伺服驱动的主要特点是什麽? 3.试述可编程序控制器的功能及组成。 4.简述数控设备中计算机数控装置的组成和功能。 得分 评卷人 四、分析题(12分) 试分析图示传动系统中,信号变换电路、传感器及丝杠螺母机构的传动误差对工作台输出 精度的影响。 输人 输出 信号 变换 伺服电机传感器 得分 评卷人 五、计算题(12分)】 已知某工作台采用直流电机丝杠螺母机构驱动,已知工作台的行程L=250mm,丝杠导程 t=4mm,齿轮减速比为i=5,要求工作台位移的测量精度为0.005mm(忽略齿轮和丝杠的传 动误差) 试采用高速端测量方法,确定旋转编码器的每转脉冲数。 DC伺服电机 联轴器 齿轮 工作台 工件 旋转编码器 ☑ 丝杠滚珠螺母 731
得 分 评卷人 三、简答题 (每小题 5分 ,共 20分) 1.为减小机械系统的传动误差,可采用哪些结构措施? 2.交流伺服电机有哪些类型?交流伺服驱动的主要特点是什磨? 3.试述可编程序控制器的功能及组成 。 4.简述数控设备 中计算机数控装置的组成和功能。 得 分 评卷人 四、分析题 (12分) 试分析图示传动系统中,信号变换 电路 、传感器及丝杠螺母机构 的传动误差对工作台输出 精度的影响。 得 分 评卷人 五、计算题 (12分) 已知某工作台采用直流电机丝杠螺母机构驱动,已知工作台的行程 L=250mm,丝杠导程 c=4mm,齿轮减速比为 i=5,要求工作台位移的测量精度为 0. OO}mm(忽略齿轮和丝杠的传 动误差)。 试采用高速端测量方法 ,确定旋转编码器的每转脉冲数。 丝杠 滚珠螺母 73l
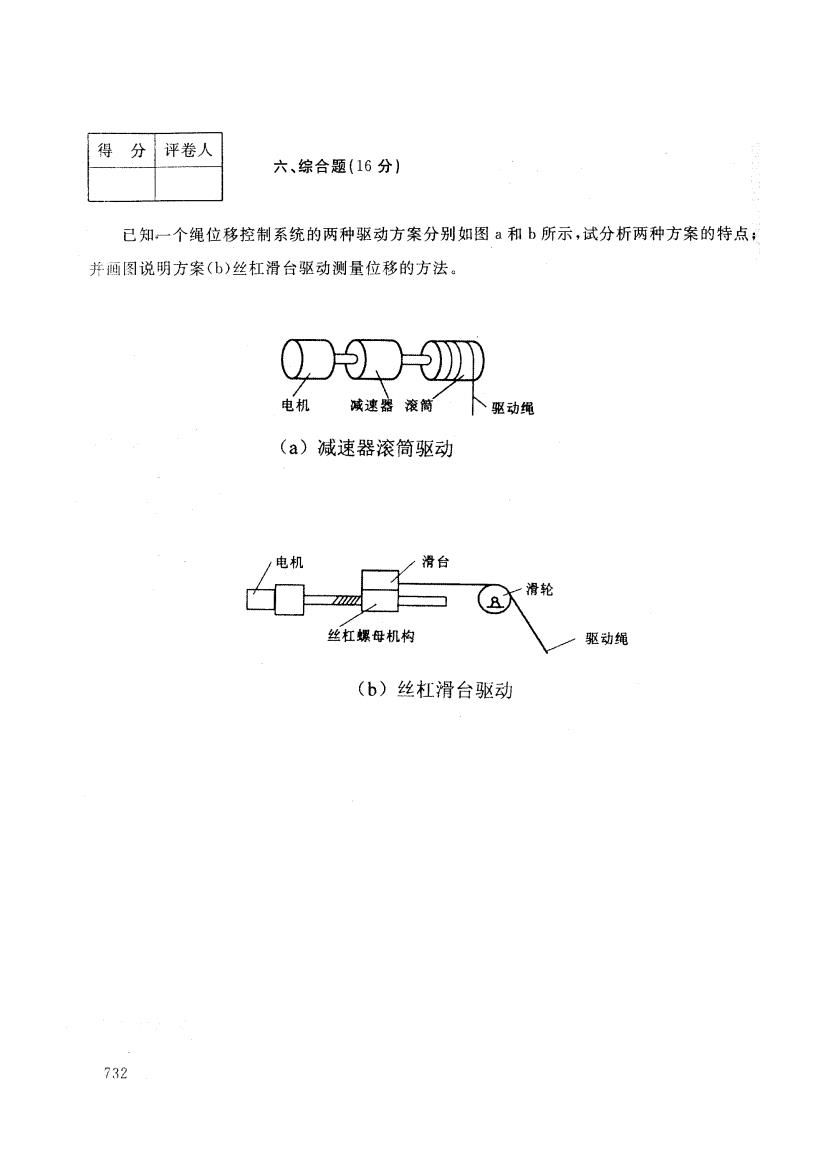
得分 评卷人 六、综合题(16分) 已知,一个绳位移控制系统的两种驱动方案分别如图a和b所示,试分析两种方案的特点: 并画图说明方案(b)丝杠滑台驱动测量位移的方法。 DD 电机 减速器滚筒 驱动绳 (a)减速器滚简驱动 电机 滑台 滑轮 丝杠螺母机构 驱动绳 (b)丝杠滑台驱动 732
六、综合题(16分) 已知。个绳位移控制系统 的两种驱动方案分别如图 a和 h所示 ,试分析两种方案的特点 ; 并画图说明方案(b>丝杠滑台驱动测量位移的方法 。 驱动绳 (a)减速器滚筒驱动 电机 滑台 驱动绳 Ch)丝杠滑台驱动 ?a2
试卷代号:1118 中央广播电视大学2007一2008学年度第一学期“开放本科”期末考试 机械专业机电一体化系统设计基础 试题答案及评分标准 (供参考) 2008年1月 一、判断题(每小题2分,共20分) 1.- 2.+ 3.+ 4. 5.- 6.- 7.十 8.+ 9.十 10.- 二、选择题(每小题2分,共20分) 1.B 2.B 3.A 4.1D 5.1D 6.C 7.A 8.B 9.C 10.D 三、简答题(每小题5分,共20分) 1.答:减小机械系统的传动误差可采用的结构措施有:适当提高零部件本身的精度:合理 设计传动链,减小零部件制造,装配误差对传动精度的影响:采用消隙机构,以减小或消除回程 误差。 2.答:交流伺服电机有永磁式交流同步电机和笼型异步电机两类。 交流伺服驱动的主要特点有:(1)调速范围大;(2)适合大、中功率伺服系统:(3)运行平稳, 转速不受负载变化的影响:(4)输出转矩较大,而转矩脉动小。 3.答:可编程序控制器可取代继电器控制,完成颜序和程序控制:可组成闭环系统,实现精 确的位置和速度控制:可构成高速数据采集与分析系统,实现生产过程的完全自动化。 典型的可编程序控制器由电源、微处理器、存贮器、输入输出接口和编程器所组成 4.答:在数控设备中,计算机数控装置是设备的核心部分,一般由专用计算机(或通用计算 机)、输人输出接口以及机床控制器等部分构成。 计算机数控装置根据输入的数据和程序,完成数据运算、逻辑判断、输人输出控制等功能: 机床控制器主要用于机床的辅助功能,主轴转速的选择和换刀功能的控制。 733
试卷代号:1118 中央广播电视大学20Q7-2008学年度第一学期“开放本科”期末考试 机械专业 机电一体化系统设计基础 试题答案及评分标准 (供参考) 2008年 1月 一、判断题(每小题 2分,共 2。分) ].一 2.十 3.+ 4.一 J.一 6.一 7.十 }.+ 9.一 10.一 二、选择题(每小题 2分,共 ?0分 ) 1. 13 2. }3 3.八 4. D }. 1J 6.C 7.A 8.13 9.C 10.i) 三、简答题 (每小题 J分,共 20分 ) 1.答:减小机械系统的传动误差可采用的结构措施有:适当提高零部件本身的精度:合理 设计传动链,减小零部件制造、装配误差对传动精度的影响;采用消隙机构,以减小或消除回程 误差 。 2.答:交流伺服电机有永磁式交流同步电机和笼型异步电机两类 交流伺服驱动的主要特点有:(U调速范围大;(2)适合大、中功率伺服系统:(3>运行平稳, 转速不受负载变化的影响 ;(幻输出转矩较大,而转矩脉动小。 3.答:可编程序控制器可取代继电器控制,完成顺序和程序控制;}}1组成闭环系统,实现精 确的位置和速度控制;可构成高速数据采集与分析系统 ,实现生产过程的完全 自动化。 典型的 可编程序控制器由电源 、微处理器 、存贮器、输入输出接 日和编程器所组成。 4.答:在数控设备中,计算机数控装置是设备的核心部分,一般由专用计算机(或通川计算 机)、输人输出接口以及机床控制器等部分构成。 计算机数控装置根据输入的数据和程序,完成数据运算、逻辑判断、输八输出控制等功能; 扫[床控制器主要用于机床的辅助功能,主轴转速的选择和换 刀功能的控制 〕 73:
四、分析题(12分)】 解答: 信号变换电路位于输入通道,误差的低频分量会影响输出精度,因此对静态精度有较高要 求;而误差的高频分量对输出精度几乎没有影响,允许存在一定程度的高频噪声。 传感器是位于反馈通道上的环节,其对输出精度的影响与位于输人通道的信号变换电路 相同。 丝杠螺母机构位于闭环之后,其误差的低颖分量和高频分量都会影响输出精度,因此要尽 量消除传动间隙和传动误差。 五、计算题(12分) 解: 高速端测量,传感器与电机相连接。 设传感器的每转脉冲数为n,每个脉冲对应工作台的位移为△L=名 in 由测量精度,△L.=0.005mm,则 =8LX0.005=160脉冲/转 选取n一200光电编码器,则理论测量精度 △L= 4 5×2001 =0.004<0.005 满足题目要求。 六、综合题(16分) 解: 1.驱动特点: 方案a 结构简单、易实现。绳的位移可以很大,但绳在滚筒方向会产生横向位移。需要采用制动 器或者止逆型减速器才能防止绳对电机的反向驱动。 734
四、分析题 (12分 ) 解答 : 信号变换电路位于输入通道,误差的低频分量会影响输出精度,因此对静态精度有较高要 求;而误差的高频分量对输出精度几乎没有影响,允许存在一定程度的高频噪声。 传感器是位于反馈通道上的环节,其对输出精度的影响与位于输人通道的信号变换电路 相同。 丝杠螺母机构位于闭环之后 ,其误差的低频分量和高频分量都会影响输 出精度 ,因此要尽 量消除传动间隙和传动误差。 五 、计算题(12分) 解 : 高速端测量 .传感器与 电机相连接 。 设传感器白勺每转脉冲数为n,每个脉冲对应工作台的位移为△L=avt 由测量精度,}1L=0. 005mm,则 t 4 rt= 丁-甲二二= 二‘丁二,-一 丁二 片 i匕u z}L 入 U. UUb 脉冲/转 选取 ,,=200光电编码器,则理论测量精度 = 0. 004<,0. 005 满足题 目要求 六 、综合题 (16分) 解 : 1.驱动特点: 方案 a 结构简单、易实现。绳的位移可以很大,但绳在滚筒方向会产生横向位移。需要采用制动 器或者止逆型减速器才能防止绳对电机的反向驱动。 734

方案b 结构较简单,成本与方案相当。绳的位移要受到丝杠长度的限制。普通丝杠具有止逆 功能,无需增加制动器即可防止绳对电机的反向驱动。无横向位移。 2.方案b的测量方法(如图所示》 (1)电机轴安装编码器间接测量绳的位移; (2)滑台安装直线传感器直接测量绳的位移。 电机 滑台 滑轮 8 编码器 丝杠螺母机构 传感器 电机 滑台 滑轮 B 丝杠螺母机构 735
方案 b 结构较简单,成本与方案 a相当。绳的位移要受到丝杠长度的限制。普通丝杠具有止逆 功能,无需增加制动器即可防止绳对电机的反向驱动。无横向位移。 2.方案 b的测量方法(如图所示) (1)电机轴安装编码器间接测量绳的位移; (2)滑台安装直线传感器直接测量绳的位移 。 传感 器 7;:}